Você também pode gostar
- 3.1.1 PPT 12 Introducción Al Sistema de SuspensiónDocumento22 páginas3.1.1 PPT 12 Introducción Al Sistema de SuspensiónJose Alfredo Rojas UribeAinda não há avaliações
- Prueba El Tunel Encontradaennet1Documento20 páginasPrueba El Tunel Encontradaennet1Loreto Teran Maturana71% (34)
- Prueba Final MM1 2021 10 WMorales C - SolDocumento4 páginasPrueba Final MM1 2021 10 WMorales C - SolJavier SalvatierraAinda não há avaliações
- Semana 16Documento139 páginasSemana 16master1514100% (1)
- Procedimiento Rescate Montacargas T5-CRDocumento19 páginasProcedimiento Rescate Montacargas T5-CRluis carvajalAinda não há avaliações
- Técnicas de comunicación oral: debate, mesa redonda, exposición, panel y conferenciaDocumento3 páginasTécnicas de comunicación oral: debate, mesa redonda, exposición, panel y conferenciaAnonymous pOYB8dCtJ60% (5)
- Mec 3341Documento2 páginasMec 3341Olivert Honorio ApazaAinda não há avaliações
- Convocatoria - Contratacion de 32 ConsultoresDocumento6 páginasConvocatoria - Contratacion de 32 ConsultoresOlivert Honorio ApazaAinda não há avaliações
- 1 Calibre AWG Conductores SoloDocumento6 páginas1 Calibre AWG Conductores SoloOlivert Honorio ApazaAinda não há avaliações
- ECONOMIADocumento8 páginasECONOMIAOlivert Honorio ApazaAinda não há avaliações
- Leccion 4Documento22 páginasLeccion 4Olivert Honorio ApazaAinda não há avaliações
- Conceptos 2580Documento1 páginaConceptos 2580MIGUEL ANGEL VICENTE CANAVIRIAinda não há avaliações
- 0 Práctica Laboratorio Inst ELT OJODocumento33 páginas0 Práctica Laboratorio Inst ELT OJOOlivert Honorio ApazaAinda não há avaliações
- Universidad Tecnológica BolivianaDocumento4 páginasUniversidad Tecnológica BolivianaOlivert Honorio ApazaAinda não há avaliações
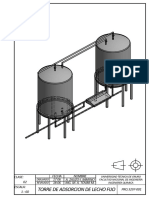
- Adsorcion 4Documento1 páginaAdsorcion 4Olivert Honorio ApazaAinda não há avaliações
- Mercados forwards y swapsDocumento6 páginasMercados forwards y swapsOlivert Honorio ApazaAinda não há avaliações
- INTRODUCIONDocumento24 páginasINTRODUCIONOlivert Honorio ApazaAinda não há avaliações
- Pieza 1 1Documento1 páginaPieza 1 1Olivert Honorio ApazaAinda não há avaliações
- Tornillo 1 2Documento1 páginaTornillo 1 2Olivert Honorio ApazaAinda não há avaliações
- Tornillo 1 1Documento1 páginaTornillo 1 1Olivert Honorio ApazaAinda não há avaliações
- Pieza 1 1Documento1 páginaPieza 1 1Olivert Honorio ApazaAinda não há avaliações
- Almacenes de Producción en Cadena de Frio-1Documento11 páginasAlmacenes de Producción en Cadena de Frio-1Olivert Honorio ApazaAinda não há avaliações
- Tornillo 1 1Documento1 páginaTornillo 1 1Olivert Honorio ApazaAinda não há avaliações
- Destilacion 3Documento1 páginaDestilacion 3Olivert Honorio ApazaAinda não há avaliações
- 2273a Practica 2Documento2 páginas2273a Practica 2Olivert Honorio ApazaAinda não há avaliações
- Destilacion 1Documento1 páginaDestilacion 1Olivert Honorio ApazaAinda não há avaliações
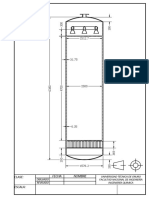
- Adsorcion 1Documento1 páginaAdsorcion 1Olivert Honorio ApazaAinda não há avaliações
- 2.mec y AniDocumento11 páginas2.mec y AniOlivert Honorio ApazaAinda não há avaliações
- ALIMENTACIONDocumento1 páginaALIMENTACIONOlivert Honorio ApazaAinda não há avaliações
- Adsorcion 2Documento1 páginaAdsorcion 2Olivert Honorio ApazaAinda não há avaliações
- Cadena de FríoDocumento10 páginasCadena de FríoOlivert Honorio ApazaAinda não há avaliações
- Extractor: Clase: 01 Iso-E Fecha NombreDocumento1 páginaExtractor: Clase: 01 Iso-E Fecha NombreOlivert Honorio ApazaAinda não há avaliações
- Secador Por Aspersion: Clase: 02 Iso-E Fecha NombreDocumento1 páginaSecador Por Aspersion: Clase: 02 Iso-E Fecha NombreOlivert Honorio ApazaAinda não há avaliações
- Secador Por Aspersion: Clase: 02 Iso-E Fecha NombreDocumento1 páginaSecador Por Aspersion: Clase: 02 Iso-E Fecha NombreOlivert Honorio ApazaAinda não há avaliações
- Red de Aire ComprimidoDocumento5 páginasRed de Aire ComprimidoOlivert Honorio ApazaAinda não há avaliações
- 2 2020 Proyecto MecanismosDocumento4 páginas2 2020 Proyecto MecanismosOlivert Honorio ApazaAinda não há avaliações
- Clase 9 - 1er Ley Termodinámica-TrabajoDocumento33 páginasClase 9 - 1er Ley Termodinámica-Trabajo0502022009Ainda não há avaliações
- Caracterización de La Pobreza en Baja VerapazDocumento78 páginasCaracterización de La Pobreza en Baja Verapazfernando_ortíz_34Ainda não há avaliações
- Programación Orientada A ObjetosDocumento137 páginasProgramación Orientada A ObjetospolouserAinda não há avaliações
- Estrategia océano azul StarbucksDocumento7 páginasEstrategia océano azul StarbucksmaxAinda não há avaliações
- Informe MruDocumento10 páginasInforme MruLuis Pacovilca ArhuataAinda não há avaliações
- Talleres Guia 5Documento10 páginasTalleres Guia 5daya sotoAinda não há avaliações
- El TermohigrógrafoDocumento6 páginasEl TermohigrógrafoJacqueline SerranoAinda não há avaliações
- Teoría Ficha 2Documento8 páginasTeoría Ficha 2Luis Enrique Coca RamirezAinda não há avaliações
- Prueba Malinche - Electivo 3ro MedioDocumento3 páginasPrueba Malinche - Electivo 3ro MedioÁmbar VioletaAinda não há avaliações
- 34.shimadzu BiospecDocumento16 páginas34.shimadzu BiospecANGIE XIMENA BOLIVAR PRIETOAinda não há avaliações
- ENCRYPTOR ChapaDocumento2 páginasENCRYPTOR ChapaJoséOrdóñezCedeñoAinda não há avaliações
- Informe 1 Q-OrganicaDocumento10 páginasInforme 1 Q-OrganicaJazmin OshuaAinda não há avaliações
- Estilos de aprendizaje VAKDocumento6 páginasEstilos de aprendizaje VAKPsic Manuel de los SantosAinda não há avaliações
- Tarea Notas Al Margen y ResumenDocumento9 páginasTarea Notas Al Margen y ResumenAndrea Noelia Miranda ChipanaAinda não há avaliações
- ACTIVIDAD EVALUATIVA EJE 4 AseguramientoDocumento9 páginasACTIVIDAD EVALUATIVA EJE 4 AseguramientoMaria Luisa Gaviria GarciaAinda não há avaliações
- Cuestionario Sobre El Origen de Las EspeciesDocumento3 páginasCuestionario Sobre El Origen de Las EspeciesFernándo nieto100% (1)
- Estructura microscópica de los palos de yerba mateDocumento5 páginasEstructura microscópica de los palos de yerba mateBruno LopezAinda não há avaliações
- Arte, Ciencia y NaturalezaDocumento5 páginasArte, Ciencia y NaturalezaJulio CruzAinda não há avaliações
- Marketing 1.0-4.0 Puro Marketing UleamDocumento10 páginasMarketing 1.0-4.0 Puro Marketing UleamElena LaraAinda não há avaliações
- Documento de Apoyo CalidadDocumento34 páginasDocumento de Apoyo CalidadEdgar David Cardenas GuzmanAinda não há avaliações
- Observaciones Segundo GradoDocumento2 páginasObservaciones Segundo GradoBlanca Ines Cruz SebastianAinda não há avaliações
- Agenda VI ENCUENTRO DE PRACTICANTES Y GRADUADOS EXITOSOS-1Documento3 páginasAgenda VI ENCUENTRO DE PRACTICANTES Y GRADUADOS EXITOSOS-1Natalia GomezAinda não há avaliações
- Estilos Parentales y Calidad de Vida Familiar en Adolescentes Con Dificultades ConductualesDocumento12 páginasEstilos Parentales y Calidad de Vida Familiar en Adolescentes Con Dificultades ConductualesdanaAinda não há avaliações
- Inducción Basica de SeguridadDocumento97 páginasInducción Basica de Seguridadnayadeth urbaezAinda não há avaliações