Você também pode gostar
- td2 VibraDocumento5 páginastd2 VibraAilton muhancheAinda não há avaliações
- Travaux Dirigés de Mécanique N°4: Exercice 1: Mesure D'un Coefficient de ViscositéDocumento3 páginasTravaux Dirigés de Mécanique N°4: Exercice 1: Mesure D'un Coefficient de ViscositéMedjahed MhåmędAinda não há avaliações
- Série Oscillations Mécaniques ForcéesDocumento11 páginasSérie Oscillations Mécaniques ForcéesHakkache YassinAinda não há avaliações
- ExamenDocumento2 páginasExamenGermain YvesAinda não há avaliações
- Série D'exercices - Physique Cinématique 2 - 4éme Mathématiques (2013-2014) MR Affi Fethi 2 PDFDocumento8 páginasSérie D'exercices - Physique Cinématique 2 - 4éme Mathématiques (2013-2014) MR Affi Fethi 2 PDFAzizElheniAinda não há avaliações
- TDMeca 5Documento3 páginasTDMeca 5Ihsan Mokhlisse100% (1)
- Série D'exercices - Physique Cinématique 2 - 4éme Mathématiques (2013-2014) MR Affi Fethi 2 PDFDocumento8 páginasSérie D'exercices - Physique Cinématique 2 - 4éme Mathématiques (2013-2014) MR Affi Fethi 2 PDFLahcen ElamraouiAinda não há avaliações
- Exmecanique 2008-2009 4 PDFDocumento12 páginasExmecanique 2008-2009 4 PDFAliOucharAinda não há avaliações
- English Grammar in Use - Fifth Edition (Raymond Murphy)Documento10 páginasEnglish Grammar in Use - Fifth Edition (Raymond Murphy)Pkpk StafAinda não há avaliações
- Devoir de Synthese N°2: Ecole Sadiki TunisDocumento4 páginasDevoir de Synthese N°2: Ecole Sadiki TunistorkitaherAinda não há avaliações
- TD8 Oscillateurs Forces ElectriquesDocumento3 páginasTD8 Oscillateurs Forces Electriquescapelletimothee1Ainda não há avaliações
- Exc Force InertieDocumento9 páginasExc Force InertieRommel NguyenAinda não há avaliações
- Preparation DS 05Documento8 páginasPreparation DS 05الدعم الجامعيAinda não há avaliações
- Dyn en ExoDocumento11 páginasDyn en ExodarkparadizAinda não há avaliações
- TDMeca 4Documento3 páginasTDMeca 4Ihsan MokhlisseAinda não há avaliações
- Série D'exercices N°8 - Sciences Physiques Les Oscillations Mécaniques Libres - Bac Technique (2010-2011) MR ALIBI ANOUARDocumento6 páginasSérie D'exercices N°8 - Sciences Physiques Les Oscillations Mécaniques Libres - Bac Technique (2010-2011) MR ALIBI ANOUARKais GuesmiAinda não há avaliações
- Application D BasesDocumento16 páginasApplication D BasesBabacarDiagoAinda não há avaliações
- MeclibreDocumento3 páginasMeclibreabdelkrim salemAinda não há avaliações
- Mham TDDocumento15 páginasMham TDkindaishiAinda não há avaliações
- Ondes Et Vibrations: IUT, Année 2008-09Documento16 páginasOndes Et Vibrations: IUT, Année 2008-09Armand StevenskiAinda não há avaliações
- Annales 8 To 13Documento49 páginasAnnales 8 To 13andoAinda não há avaliações
- Série D'exercices - Physique - Mecanique Forcé - Bac Mathématiques (2016-2017) MR Afdal AliDocumento9 páginasSérie D'exercices - Physique - Mecanique Forcé - Bac Mathématiques (2016-2017) MR Afdal AliKhadija HnifiAinda não há avaliações
- Osc AmDocumento6 páginasOsc AmEvaAinda não há avaliações
- Physique 2020Documento14 páginasPhysique 2020Je SyisAinda não há avaliações
- Serie Oscillations Mécaniques LibresDocumento6 páginasSerie Oscillations Mécaniques Libreskhlifisamir19Ainda não há avaliações
- Meca Exam 2010Documento4 páginasMeca Exam 2010Nam KolyaAinda não há avaliações
- Recc81vision nc2b07Documento5 páginasRecc81vision nc2b07dragokalAinda não há avaliações
- 17-Oscillateur+charge Et Decharg+ Courant Sinus+ Pendule PesantDocumento5 páginas17-Oscillateur+charge Et Decharg+ Courant Sinus+ Pendule PesantAnonymous hbpCoy40% (1)
- TDMeca 7Documento4 páginasTDMeca 7Ihsan MokhlisseAinda não há avaliações
- Exmecanique 2008-2009 4 PDFDocumento12 páginasExmecanique 2008-2009 4 PDFIl NBAinda não há avaliações
- CNC Psi 2020 Physique SujetDocumento7 páginasCNC Psi 2020 Physique Sujettoumi.prepaAinda não há avaliações
- Exo X UlmDocumento8 páginasExo X UlmAnas AbidiAinda não há avaliações
- IA de Diourbel - Cellule Mixte Des Sciences Physiques-Terminale S Année Scolaire 2023/2024 TD: Oscillations Mecaniques LibresDocumento4 páginasIA de Diourbel - Cellule Mixte Des Sciences Physiques-Terminale S Année Scolaire 2023/2024 TD: Oscillations Mecaniques Libressng8j9md6kAinda não há avaliações
- Meca Exam 2013Documento7 páginasMeca Exam 2013Nam KolyaAinda não há avaliações
- P12 Oscillateurs méc.-WahabDiop PDFDocumento7 páginasP12 Oscillateurs méc.-WahabDiop PDFMOSTAFA100% (3)
- TD Dynamique Terrestre Mpsi 1Documento3 páginasTD Dynamique Terrestre Mpsi 1aminealskjzAinda não há avaliações
- TD 1 VibrationsDocumento27 páginasTD 1 Vibrationskaoutar soumatiAinda não há avaliações
- Mécanique TerrestreDocumento6 páginasMécanique TerrestreMouad DohmiAinda não há avaliações
- Série D'exercices - Physique Oscillations Mécaniques Forcées (SC Exp) - Bac Sciences Exp (2014-2015) MR Handoura NaceurDocumento4 páginasSérie D'exercices - Physique Oscillations Mécaniques Forcées (SC Exp) - Bac Sciences Exp (2014-2015) MR Handoura NaceurGhada DaddouAinda não há avaliações
- Oscillations Mecaniques Libres PDFDocumento6 páginasOscillations Mecaniques Libres PDFMohamed El OuahdaniAinda não há avaliações
- DM2 MecaniqueDocumento6 páginasDM2 MecaniqueyouthangouokoAinda não há avaliações
- Oscillations Mécaniques ForcéesDocumento4 páginasOscillations Mécaniques ForcéesBryce Ingram100% (1)
- Page FacebookDocumento3 páginasPage FacebookDjm AlgAinda não há avaliações
- TD - Chapitre I - CADYDocumento12 páginasTD - Chapitre I - CADYjacques boris zoo mevahAinda não há avaliações
- TD Mec 5 OscillateurDocumento5 páginasTD Mec 5 OscillateurChafi DrissAinda não há avaliações
- Hydro Td02Documento16 páginasHydro Td02Djamila BENYOUCEFAinda não há avaliações
- Hooke1617 PDFDocumento5 páginasHooke1617 PDFABD ELBASSETAinda não há avaliações
- TD Ondes Serie2 (17 - 18)Documento5 páginasTD Ondes Serie2 (17 - 18)Malick DiopAinda não há avaliações
- Série D'exercices - Physique Oscillations Mécaniques Libres - Bac Sciences Exp (2014-2015) MR Handoura NaceurDocumento4 páginasSérie D'exercices - Physique Oscillations Mécaniques Libres - Bac Sciences Exp (2014-2015) MR Handoura Naceura6857971Ainda não há avaliações
- Exercice 1 (6 Points) Oscillations D'un Pendule Élastique HorizontalDocumento8 páginasExercice 1 (6 Points) Oscillations D'un Pendule Élastique HorizontalHouzal-dine SaidAinda não há avaliações
- Revision 3Documento2 páginasRevision 3yassirtm el outmaniAinda não há avaliações
- Mec Forcé 2023Documento4 páginasMec Forcé 2023Aymen ToumiAinda não há avaliações
- Série D'exercices N°1 - Sciences Physiques LES OSCILLATIONS LIBRES MECANIQUES - Bac Sciences Exp (2012-2013) MR ALIBI ANOUARDocumento6 páginasSérie D'exercices N°1 - Sciences Physiques LES OSCILLATIONS LIBRES MECANIQUES - Bac Sciences Exp (2012-2013) MR ALIBI ANOUARKais GuesmiAinda não há avaliações
- 22 PC Sujet PhycDocumento13 páginas22 PC Sujet PhycbessisnathaneAinda não há avaliações
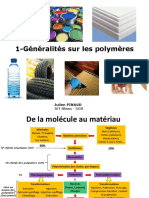
- 1-Généralités Sur Les PolymèresDocumento11 páginas1-Généralités Sur Les PolymèresAhmed Mido100% (1)
- Les Polymères de ThermoformageDocumento10 páginasLes Polymères de ThermoformageJay SlvatrAinda não há avaliações
- M SGM IMECA WebDocumento2 páginasM SGM IMECA WebJay SlvatrAinda não há avaliações
- CH 3 PDFDocumento75 páginasCH 3 PDFMohammed BouchelarmAinda não há avaliações
- Ch2 Cinématique PDFDocumento69 páginasCh2 Cinématique PDFJay SlvatrAinda não há avaliações
- Fiche - UE - Management Projet InnovantDocumento1 páginaFiche - UE - Management Projet InnovantJay SlvatrAinda não há avaliações
- Masse Molaire MoyenneDocumento20 páginasMasse Molaire MoyenneJay Slvatr100% (1)
- Cours Maths S 05Documento5 páginasCours Maths S 05hammoucheAinda não há avaliações
- 8253 Technique de Realisation de Chassis Mecano Soudes Le Soudage EnspsDocumento13 páginas8253 Technique de Realisation de Chassis Mecano Soudes Le Soudage EnspsdaemsalAinda não há avaliações
- Polynomes Orthogonaux PDFDocumento2 páginasPolynomes Orthogonaux PDFJay SlvatrAinda não há avaliações
- Présentation 10 Oct ModDocumento5 páginasPrésentation 10 Oct ModJay SlvatrAinda não há avaliações
- Séries EntièresDocumento6 páginasSéries EntièresEssaidi Ali100% (1)
- Fic 00080Documento529 páginasFic 00080andoAinda não há avaliações
- Exempleds2012sp2 CorrigeDocumento8 páginasExempleds2012sp2 CorrigeJay SlvatrAinda não há avaliações
- Cnc2016 Min Max MPDocumento2 páginasCnc2016 Min Max MPJay Slvatr57% (7)
- Exempleds2010sp2 CorrigeDocumento2 páginasExempleds2010sp2 CorrigeJay SlvatrAinda não há avaliações
- Exemple DsDocumento4 páginasExemple DsJay SlvatrAinda não há avaliações
- Algorithmes de TriDocumento3 páginasAlgorithmes de TriJay SlvatrAinda não há avaliações
- 10-141104 JT OA Reparation Du Beton v1 Cle5ebbebDocumento43 páginas10-141104 JT OA Reparation Du Beton v1 Cle5ebbebAnonymous OVrUFpDljAinda não há avaliações
- Exemple Ds 2010 SP 2Documento6 páginasExemple Ds 2010 SP 2Jay SlvatrAinda não há avaliações
- Guide Mobilite 2016Documento135 páginasGuide Mobilite 2016Jay Slvatr0% (1)
- Exponentiel D'une MatriceDocumento2 páginasExponentiel D'une MatriceJay SlvatrAinda não há avaliações
- Guide Mobilite 2016Documento4 páginasGuide Mobilite 2016Anonymous JIjLxKYApNAinda não há avaliações
- Espaces Monogènes, Endomorphismes CycliquesDocumento5 páginasEspaces Monogènes, Endomorphismes CycliquesEssaidi Ali100% (1)
- Résumé D'usureDocumento4 páginasRésumé D'usureJay SlvatrAinda não há avaliações
- 2 - Introduction Aux Materiaux Aeronautiques - 1 PDFDocumento116 páginas2 - Introduction Aux Materiaux Aeronautiques - 1 PDFJay SlvatrAinda não há avaliações
- GéotechniqueDocumento53 páginasGéotechniqueJay Slvatr100% (1)
- Réussir L'entretien D'embaucheDocumento24 páginasRéussir L'entretien D'embaucheRodrigue Kossi100% (2)
- Geotechnique Metier UfgDocumento13 páginasGeotechnique Metier Ufgjfejfe100% (1)
- Mater ChimieDocumento7 páginasMater ChimieJay SlvatrAinda não há avaliações
- TransactionDocumento50 páginasTransactionRe Sab RinaAinda não há avaliações
- BoumgharSaid BourichaN PDFDocumento88 páginasBoumgharSaid BourichaN PDFDJAMEL EDDINE FEKIRAinda não há avaliações
- C1S3 Le Hard DiscountDocumento4 páginasC1S3 Le Hard DiscountHassane Oihi100% (1)
- Le Coran Explique Aux Enfant Tome 2Documento75 páginasLe Coran Explique Aux Enfant Tome 2massilia1320017020Ainda não há avaliações
- Cours - Up - 2 Structure Des Lipides 1Documento37 páginasCours - Up - 2 Structure Des Lipides 1Jude Agbodji100% (2)
- Le Réglement Interieur-PrincipesDocumento2 páginasLe Réglement Interieur-Principesgueyemoussa1199Ainda não há avaliações
- Cruel Zelanda V-2 EditDocumento63 páginasCruel Zelanda V-2 EditDark_LetterAinda não há avaliações
- Covid 19 Hvac Systems in Buildings PDFDocumento8 páginasCovid 19 Hvac Systems in Buildings PDFHassan OriafraAinda não há avaliações
- GVC - TDR Agent de Terrain ECHO Haiti 2021-1Documento2 páginasGVC - TDR Agent de Terrain ECHO Haiti 2021-1Berthony Saint FleurAinda não há avaliações
- Quiz 15 de 25Documento6 páginasQuiz 15 de 25Carol ReyesAinda não há avaliações
- Le Parisien - 14 F Vrier 2024Documento44 páginasLe Parisien - 14 F Vrier 2024BenoitLemaireAinda não há avaliações
- Ligne: Sarreguemines Saint AvoldDocumento2 páginasLigne: Sarreguemines Saint AvoldAissa HenniAinda não há avaliações
- Analyse Textile Et Industrie Textile ExeDocumento30 páginasAnalyse Textile Et Industrie Textile ExeSarah SebâaAinda não há avaliações
- Facture NikeDocumento1 páginaFacture Nikebadou92% (12)
- Conduits ArnouldDocumento16 páginasConduits ArnouldABELWALIDAinda não há avaliações
- Projet D - Éclairage PDFDocumento19 páginasProjet D - Éclairage PDFHadji MhamedAinda não há avaliações
- Systeme 1 Systeme 2 Les Deux Vitesses de La PenseeDocumento72 páginasSysteme 1 Systeme 2 Les Deux Vitesses de La Penseeomar2022100% (5)
- Version BibliothequeDocumento185 páginasVersion Bibliothequehoussem1209Ainda não há avaliações
- - المستوى الرابع إبتدائي - - Ce4-d 2023-2024Documento1 página- المستوى الرابع إبتدائي - - Ce4-d 2023-2024mohamedziad.boudyAinda não há avaliações
- Stratégie Lean : Les Dix Règles D'or de La Compétitivité Et de L'innovation CollaborativesDocumento16 páginasStratégie Lean : Les Dix Règles D'or de La Compétitivité Et de L'innovation CollaborativespouAinda não há avaliações
- Ngo Van - Utopie AntiqueDocumento48 páginasNgo Van - Utopie AntiqueBaptiste EychartAinda não há avaliações
- Exposé Décision Finanacement Et Placement A Long Terme PDFDocumento39 páginasExposé Décision Finanacement Et Placement A Long Terme PDFGadour YoussefAinda não há avaliações
- La Circoncision À L'origine de Troubles de La PersonnalitéDocumento2 páginasLa Circoncision À L'origine de Troubles de La PersonnalitékobbbooAinda não há avaliações
- G4 Les Grandes Villes Du Monde SDocumento7 páginasG4 Les Grandes Villes Du Monde SOthmanAinda não há avaliações
- Nouvelle GrammaireDocumento38 páginasNouvelle Grammairegeorge soukosAinda não há avaliações
- STHDocumento169 páginasSTHZoé BertrandAinda não há avaliações
- FEXADocumento6 páginasFEXAPierre BretonniereAinda não há avaliações
- Chapitre 1 Raisonnements Par RcurrenceDocumento2 páginasChapitre 1 Raisonnements Par RcurrenceJihene SamariAinda não há avaliações
- A4 Addictions - ExerciceDocumento3 páginasA4 Addictions - Exercicedupont100% (2)
- Présentation ÉconométrieDocumento16 páginasPrésentation ÉconométrieEmma AmeslantAinda não há avaliações