Você também pode gostar
- Cours Matériaux N°1-Structure de La MatièreDocumento24 páginasCours Matériaux N°1-Structure de La MatièreDamienAinda não há avaliações
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesNo EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesAinda não há avaliações
- Torseurs Des Liaisons NormaliseesDocumento3 páginasTorseurs Des Liaisons NormaliseesmugiwaraxAinda não há avaliações
- Guide Catia v5Documento26 páginasGuide Catia v5drissic100% (37)
- MINI PROJET ConceptionDocumento40 páginasMINI PROJET Conceptionzehii ghofranAinda não há avaliações
- Etude Des Systemes PDFDocumento14 páginasEtude Des Systemes PDFDjamila TinfekhsiAinda não há avaliações
- MMC Drapier-Kermouche-Moulin 2021Documento168 páginasMMC Drapier-Kermouche-Moulin 2021Adelaide Stewart100% (1)
- Cours 2AS Completv1Documento58 páginasCours 2AS Completv1MohamedAyoubAinda não há avaliações
- Cours Cotation FonctionnelleDocumento26 páginasCours Cotation FonctionnelleLaila AzzouziAinda não há avaliações
- Fiche Sur Lecture Dun Dessin Densemble 1 PDFDocumento9 páginasFiche Sur Lecture Dun Dessin Densemble 1 PDFSonia SalahAinda não há avaliações
- Chapitre 3 CinématiqueDocumento41 páginasChapitre 3 CinématiqueNowe AhmadeAinda não há avaliações
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceNo EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceAinda não há avaliações
- Cremona Ritter Callaud CastiglianoDocumento61 páginasCremona Ritter Callaud CastiglianoStanley Adu Al MalikAinda não há avaliações
- Cours Mécanique Du Solide - S3 Upload Par Mouhssine - Koussour by ExoSupDocumento121 páginasCours Mécanique Du Solide - S3 Upload Par Mouhssine - Koussour by ExoSupzamora_1985Ainda não há avaliações
- Trans MettreDocumento80 páginasTrans MettreEssaid AjanaAinda não há avaliações
- Chapitre 4 EngrenagesDroitsDocumento20 páginasChapitre 4 EngrenagesDroitsKaram QaoubAinda não há avaliações
- Chap 3 Meca Complet PDFDocumento26 páginasChap 3 Meca Complet PDFMohamed mellahAinda não há avaliações
- Representation Graphique Du RéelDocumento5 páginasRepresentation Graphique Du Réelsara100% (1)
- DS1 - DMéc - Cellule Flexible D'usinageDocumento3 páginasDS1 - DMéc - Cellule Flexible D'usinageElafif HamdiAinda não há avaliações
- Séries Numériques - 2 PDFDocumento23 páginasSéries Numériques - 2 PDFAch Raf100% (1)
- Exemple de Lecture de SpecificationDocumento30 páginasExemple de Lecture de SpecificationCirclips100% (1)
- CH6 Equations Differentielles Ordinaires EDODocumento53 páginasCH6 Equations Differentielles Ordinaires EDOAmina ElAinda não há avaliações
- Examens Et SolutionsDocumento24 páginasExamens Et Solutionsfaid ossamaAinda não há avaliações
- 2 Bis - Bilan Liaisons Mecanique V MCDocumento2 páginas2 Bis - Bilan Liaisons Mecanique V MCnadiAinda não há avaliações
- Etude Des Procedes PDFDocumento42 páginasEtude Des Procedes PDFAymen HssainiAinda não há avaliações
- Mécanique Du PointDocumento190 páginasMécanique Du PointanthalyaAinda não há avaliações
- Chap2 Leçon2 3&4Documento52 páginasChap2 Leçon2 3&4Guiliass100% (2)
- 2007-Synthèse de FABRICATION MECANIQUEDocumento4 páginas2007-Synthèse de FABRICATION MECANIQUEcha benAinda não há avaliações
- Chapitre 1 - Procédé de FabricationDocumento10 páginasChapitre 1 - Procédé de Fabricationالسعيد بوحملةAinda não há avaliações
- Chapitre IDocumento45 páginasChapitre Iqueen latiAinda não há avaliações
- MetallurgieDocumento17 páginasMetallurgieMAROIENEAinda não há avaliações
- Cours de Resistance de Materiaux de ZITODocumento59 páginasCours de Resistance de Materiaux de ZITOimad ArsAinda não há avaliações
- Techno Generale A4 MefaDocumento34 páginasTechno Generale A4 MefaguyAinda não há avaliações
- G PDFDocumento34 páginasG PDFismail100% (1)
- LA311 Methodes NumeriquesDocumento36 páginasLA311 Methodes NumeriquesYassine SanixAinda não há avaliações
- Moindres CarresDocumento25 páginasMoindres CarresBoulehmi NizarAinda não há avaliações
- 21-GMéc-Construction Mécanique FinalDocumento80 páginas21-GMéc-Construction Mécanique Finalأبو الأشبالAinda não há avaliações
- Géometrie de MassesDocumento4 páginasGéometrie de MasseskajtiAinda não há avaliações
- ENSP - Niveau2 - PHY228 - STATIQUE - Module 2 - LES TORSEURS UTILISES EN MECANIQUE - Cours - V22032020Documento8 páginasENSP - Niveau2 - PHY228 - STATIQUE - Module 2 - LES TORSEURS UTILISES EN MECANIQUE - Cours - V22032020NANA EmmanuelAinda não há avaliações
- DynamiqueDocumento4 páginasDynamiqueammarAinda não há avaliações
- Cimco CNC Calc ProgDocumento52 páginasCimco CNC Calc ProgRyemAinda não há avaliações
- RDM EleveDocumento19 páginasRDM Eleveruben meye meye N'koumeAinda não há avaliações
- Exercice 1 TYMOLDocumento81 páginasExercice 1 TYMOLJopeth YoussefAinda não há avaliações
- Polycopie Boukebbab BMDocumento42 páginasPolycopie Boukebbab BMZakaria BettiouiAinda não há avaliações
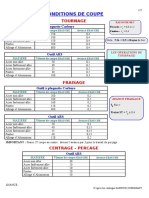
- Bilanl Des Conditions de Coupe TableauDocumento2 páginasBilanl Des Conditions de Coupe TableauChokri AtefAinda não há avaliações
- Les Liaisons Mécaniques: I. Définition III. Degrés de LibertéDocumento2 páginasLes Liaisons Mécaniques: I. Définition III. Degrés de Libertéjawaher100% (2)
- Sciences de L'ingénieurDocumento2 páginasSciences de L'ingénieurGuy YgalAinda não há avaliações
- Regdevoir CL2 GM2015 S2Documento3 páginasRegdevoir CL2 GM2015 S2alae sahraoui100% (1)
- I-Mise en Situation:: (Voir Livre de TP Page 19) ConclusionDocumento3 páginasI-Mise en Situation:: (Voir Livre de TP Page 19) Conclusionhammamin2008Ainda não há avaliações
- Liaison Glissiere ExempleDocumento2 páginasLiaison Glissiere ExempleGhada MouedhenAinda não há avaliações
- Métrologie Tolérancement - Master - Chapitre 3Documento135 páginasMétrologie Tolérancement - Master - Chapitre 3sofien msalmiAinda não há avaliações
- Echelles Du DessinDocumento4 páginasEchelles Du DessinFa IkAinda não há avaliações
- Cours 01 - Etude Des Systèmes PDFDocumento19 páginasCours 01 - Etude Des Systèmes PDFeslochAinda não há avaliações
- Cours Mécanique Des Systèmes de Solides Et de Points MatérielsDocumento118 páginasCours Mécanique Des Systèmes de Solides Et de Points MatérielsAly GAMALEDDYNAinda não há avaliações
- Dessin D'ensembleDocumento6 páginasDessin D'ensembleamri mohamed100% (1)
- ANNEXEDocumento12 páginasANNEXENaoufel FaresAinda não há avaliações
- Sup Cours Chaine FoncDocumento48 páginasSup Cours Chaine FonchvhvyAinda não há avaliações
- 04-Coupes Et Sections - 2018-2019Documento26 páginas04-Coupes Et Sections - 2018-2019RedaAbdraoufAinda não há avaliações
- ExamDocumento3 páginasExamNaoufel FaresAinda não há avaliações
- Correction Proposition de Sujet Cap AiciDocumento1 páginaCorrection Proposition de Sujet Cap AiciGuy EffaAinda não há avaliações
- Cours 4 ClusteringDocumento40 páginasCours 4 ClusteringLionnel SarreAinda não há avaliações
- Schéma CinématiqueDocumento3 páginasSchéma CinématiquefakherAinda não há avaliações
- c1 Cours Liaisons MecaniquesDocumento4 páginasc1 Cours Liaisons Mecaniqueshsn frkAinda não há avaliações
- Cinematique Du SolideDocumento20 páginasCinematique Du SolideKamal PcAinda não há avaliações
- Rappel 1 Ière AnnéeDocumento4 páginasRappel 1 Ière AnnéeAhmed fattoumAinda não há avaliações
- Meca Modelisationactions TDDocumento13 páginasMeca Modelisationactions TDMehdi Billah ouassimAinda não há avaliações
- 03-1 Modélisation Cinématique - Etude Géométrique - Cours-1Documento16 páginas03-1 Modélisation Cinématique - Etude Géométrique - Cours-1Adonaï SOLANGA KIASALATATAAinda não há avaliações
- SERIE TD2 - Cinematique - 2020 2021Documento10 páginasSERIE TD2 - Cinematique - 2020 2021Nowe AhmadeAinda não há avaliações
- Polycopie Internet10 v1Documento162 páginasPolycopie Internet10 v1Abdel DaaAinda não há avaliações
- Theorie Des MecanismesDocumento16 páginasTheorie Des MecanismesMeddour WassimAinda não há avaliações
- A 3 Suspension AvantDocumento6 páginasA 3 Suspension AvantjuanlestonAinda não há avaliações
- TP HydropulseurDocumento4 páginasTP HydropulseurcliorlAinda não há avaliações
- Nor Madess 2Documento50 páginasNor Madess 2Alla CHERIFAinda não há avaliações
- StatiqueDocumento24 páginasStatiqueimedAinda não há avaliações
- Isostatismes MIP MAPDocumento6 páginasIsostatismes MIP MAPISMAILAinda não há avaliações
- Conception MecaniqueDocumento86 páginasConception Mecaniquetarek100% (1)
- Cours Cinematique Du SolideDocumento28 páginasCours Cinematique Du SolideRajaequeenAinda não há avaliações
- Mecanique Des Structures 2Documento120 páginasMecanique Des Structures 2Monny MOMAinda não há avaliações
- GM DS7-2015 CorrigeDocumento6 páginasGM DS7-2015 CorrigeZakaria BENBARKAAinda não há avaliações
- Cour Tres InteressantDocumento17 páginasCour Tres Interessantrzougarzouga100% (1)
- CNC 2015 CG Tsi GM PDFDocumento10 páginasCNC 2015 CG Tsi GM PDFma tlawa7ch el zeblaAinda não há avaliações
- Chap1 Notion D'analyseDocumento25 páginasChap1 Notion D'analysefokou.simplicegmail.com Fokou SimpliceAinda não há avaliações
- Rapport D'études de Retrofitage/amélioration de Machine OutilsDocumento17 páginasRapport D'études de Retrofitage/amélioration de Machine OutilsjeanAinda não há avaliações
- TP01 Monte ChargeDocumento2 páginasTP01 Monte Chargemezzi100% (1)
- Terminologies Des Liaisons ElevDocumento4 páginasTerminologies Des Liaisons ElevLudo MaletAinda não há avaliações
- m21 Mathematiques Et Mecanique AppliqueeDocumento64 páginasm21 Mathematiques Et Mecanique AppliqueeSteve Gate100% (1)
- Out1 CNC Fraiseuse NumeriqueDocumento6 páginasOut1 CNC Fraiseuse NumeriqueBoutef El HachemiAinda não há avaliações
- Ass Moto Reduct EurDocumento2 páginasAss Moto Reduct EurCHATELAIN CHATELAINAinda não há avaliações
- F222 ReducteurDocumento4 páginasF222 ReducteurAja YlAinda não há avaliações