Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Infinite Quotation - Barrio Fiesta 2020Documento3 páginasInfinite Quotation - Barrio Fiesta 2020leodegarioporralAinda não há avaliações
- Barrio Fiesta Lineups - 16nov2017Documento23 páginasBarrio Fiesta Lineups - 16nov2017leodegarioporralAinda não há avaliações
- Equipment Band List - Fugro - W Hotel - 09dec2017Documento1 páginaEquipment Band List - Fugro - W Hotel - 09dec2017leodegarioporralAinda não há avaliações
- Payment Acknowledgement Receipt - 2022-002 - JL&LJDocumento4 páginasPayment Acknowledgement Receipt - 2022-002 - JL&LJleodegarioporralAinda não há avaliações
- PIP STE05121 - Anchor Bolt Design GuideDocumento55 páginasPIP STE05121 - Anchor Bolt Design Guidenistiana100% (4)
- PIP STE03350 Vertical Vessel Foundation Design Guide 12-2008 (Last Upd) PDFDocumento33 páginasPIP STE03350 Vertical Vessel Foundation Design Guide 12-2008 (Last Upd) PDFbute79100% (3)
- Infinite Band Profile 2020Documento1 páginaInfinite Band Profile 2020leodegarioporralAinda não há avaliações
- Instructions D 35103Documento12 páginasInstructions D 35103leodegarioporralAinda não há avaliações
- Laptop Discounted QuotationDocumento3 páginasLaptop Discounted QuotationleodegarioporralAinda não há avaliações
- Luca (1) - Selection of Stainless SteelDocumento14 páginasLuca (1) - Selection of Stainless SteelleodegarioporralAinda não há avaliações
- Graham - Steels For Reinforcement of ConcreteDocumento42 páginasGraham - Steels For Reinforcement of ConcreteleodegarioporralAinda não há avaliações
- Bridges ME 2012 Draft AgendaDocumento11 páginasBridges ME 2012 Draft AgendaleodegarioporralAinda não há avaliações
- Doha Bridge ConferenceDocumento6 páginasDoha Bridge ConferenceleodegarioporralAinda não há avaliações
- Arch Bridge DesignDocumento38 páginasArch Bridge DesignHüseyin Varol100% (1)
- Chris (1) - Development of New Design CodesDocumento52 páginasChris (1) - Development of New Design CodesleodegarioporralAinda não há avaliações
- Residential Wiring GuideDocumento32 páginasResidential Wiring Guidefree bird100% (1)
- Hilti Hit-Re 500-SDDocumento17 páginasHilti Hit-Re 500-SDmon012Ainda não há avaliações
- Hif 16005Documento11 páginasHif 16005tbananoAinda não há avaliações
- DNSTW Brochure PDFDocumento2 páginasDNSTW Brochure PDFleodegarioporralAinda não há avaliações
- 18-07-001 Bir FaqDocumento2 páginas18-07-001 Bir FaqleodegarioporralAinda não há avaliações
- Bill of Materials/Cost Estimate: Project: 2 Storey Residence, Enclave 2 LocationDocumento8 páginasBill of Materials/Cost Estimate: Project: 2 Storey Residence, Enclave 2 Locationleodegarioporral100% (1)
- Concrete Pavement Construction Basics: Tech NoteDocumento12 páginasConcrete Pavement Construction Basics: Tech NoteAbhijeet LimayeAinda não há avaliações
- Full ThesisDocumento136 páginasFull ThesisAlemayehu DargeAinda não há avaliações
- Nationwide Fish Ports ProjectDocumento151 páginasNationwide Fish Ports ProjectleodegarioporralAinda não há avaliações
- Free Wi Fi Project TOR PDFDocumento25 páginasFree Wi Fi Project TOR PDFleodegarioporralAinda não há avaliações
- 05 DigiBanker Activation SheetDocumento1 página05 DigiBanker Activation SheetleodegarioporralAinda não há avaliações
- AER Form Version 3.3.18Documento11 páginasAER Form Version 3.3.18leodegarioporralAinda não há avaliações
- SteelWise Anchor RodsDocumento3 páginasSteelWise Anchor RodsvAinda não há avaliações
- Scour at Coastal StructuresDocumento17 páginasScour at Coastal StructuresRamkumarAinda não há avaliações
- Sample Minute of MeetingDocumento1 páginaSample Minute of MeetingleodegarioporralAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Lecture 3 Kinematics in One Dimension - StudentDocumento51 páginasLecture 3 Kinematics in One Dimension - StudentSmurf TanAinda não há avaliações
- Biland Sa-250: Technical SpecificationsDocumento4 páginasBiland Sa-250: Technical SpecificationsNofriagara Davit HarnawanAinda não há avaliações
- Cooling SystemDocumento12 páginasCooling SystemSakoraphob BanlengchitAinda não há avaliações
- TLESMAW9 Q1 Mod1 Prepare-Weld-Materials v3Documento71 páginasTLESMAW9 Q1 Mod1 Prepare-Weld-Materials v3Ria Lalene S. TabamoAinda não há avaliações
- c140 Compair Compressor Parts Manual You Are Looking For A Book c140 Compair CompressorDocumento7 páginasc140 Compair Compressor Parts Manual You Are Looking For A Book c140 Compair CompressorMgc ElektronikAinda não há avaliações
- TP6551 MobileOperationDocumento48 páginasTP6551 MobileOperationAnonymous M0OEZEKoGiAinda não há avaliações
- Lift Truck Weight Indicator: Technical Manual GA1035A SeriesDocumento36 páginasLift Truck Weight Indicator: Technical Manual GA1035A SeriesAndres NavarroAinda não há avaliações
- 3Ph 2SIE IE2 Standard Motoren 2011Documento24 páginas3Ph 2SIE IE2 Standard Motoren 2011t_meierAinda não há avaliações
- The Anatomy of The Airfoil: General Aviation Aircraft Design Ó 2014 Elsevier Inc. All Rights ReservedDocumento63 páginasThe Anatomy of The Airfoil: General Aviation Aircraft Design Ó 2014 Elsevier Inc. All Rights ReservedmiguelAinda não há avaliações
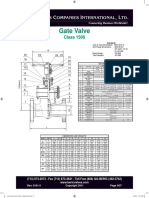
- Gate Valve Class 1500Documento1 páginaGate Valve Class 1500Hamdi Al-sarooryAinda não há avaliações
- High Speed Spindle Design and ConstructionDocumento13 páginasHigh Speed Spindle Design and ConstructionSahil KumarAinda não há avaliações
- Cambridge International Advanced Subsidiary and Advanced LevelDocumento20 páginasCambridge International Advanced Subsidiary and Advanced LevelGianra RadityaAinda não há avaliações
- Fire Protection Piping Installation and Testing-Feb. 12, 2014Documento104 páginasFire Protection Piping Installation and Testing-Feb. 12, 2014Abdul Wahed100% (7)
- Manual de Manutenção-Ing2Documento11 páginasManual de Manutenção-Ing2João GuardadoAinda não há avaliações
- MAK 2005 EnglDocumento16 páginasMAK 2005 EnglJorge Luis Reyes CarmeloAinda não há avaliações
- Finite Element Analysis in Element Analysis in Abaqus: Siddhartha Ghosh and Siddhartha Ghosh and Swapnil B. KharmaleDocumento55 páginasFinite Element Analysis in Element Analysis in Abaqus: Siddhartha Ghosh and Siddhartha Ghosh and Swapnil B. KharmaleJacky Hui100% (5)
- Mitsubishi L200 Challenger Edition 2019 UKDocumento3 páginasMitsubishi L200 Challenger Edition 2019 UKsanomanjirovicAinda não há avaliações
- RC2 Lecture 3.1 - Design of Two-Way Floor Slab SystemDocumento0 páginaRC2 Lecture 3.1 - Design of Two-Way Floor Slab SystemAmmar AbusalehAinda não há avaliações
- BS en 14620-4 2006Documento34 páginasBS en 14620-4 2006Quat Le DinhAinda não há avaliações
- Typical Vehicle Harness Wiring Diagram: MED LODocumento1 páginaTypical Vehicle Harness Wiring Diagram: MED LOandy chalifouxAinda não há avaliações
- Physics: 2009 National Qualifying ExaminationDocumento12 páginasPhysics: 2009 National Qualifying ExaminationKolisetty SudhakarAinda não há avaliações
- Climaveneta CVM 20 ManualDocumento20 páginasClimaveneta CVM 20 ManualisaAinda não há avaliações
- Alamillo Bridge Seville PDFDocumento10 páginasAlamillo Bridge Seville PDFManasviAinda não há avaliações
- Tutorial7 7d KinematicsRigidBodyDocumento12 páginasTutorial7 7d KinematicsRigidBodyJojnojie DannyzAinda não há avaliações
- Rexroth: Spare Parts ListDocumento26 páginasRexroth: Spare Parts ListRafael RodriguezAinda não há avaliações
- Speed Control of DC MotorsDocumento2 páginasSpeed Control of DC Motorsmsd183wkAinda não há avaliações
- GMH 14 NoRestrictionDocumento9 páginasGMH 14 NoRestrictionKarma Pema DorjeAinda não há avaliações
- F & M Act 1967 and Regulations For Steam Boilers PDFDocumento19 páginasF & M Act 1967 and Regulations For Steam Boilers PDFأمير حارثAinda não há avaliações
- Its All UphillDocumento2 páginasIts All Uphillmelissa0% (1)
- Composite Structure Assignment 2 (D 200)Documento12 páginasComposite Structure Assignment 2 (D 200)chehy084Ainda não há avaliações