Você também pode gostar
- Ch08-Potência TrabalhoDocumento16 páginasCh08-Potência TrabalhoJosé SearaAinda não há avaliações
- Chapter8 Conservation of EnergyDocumento6 páginasChapter8 Conservation of Energybm7gyygjtfAinda não há avaliações
- Chapter 8 Conservation of Energy: Energy, Which Is Energy That A System Possesses by VirtueDocumento15 páginasChapter 8 Conservation of Energy: Energy, Which Is Energy That A System Possesses by VirtueLilrozayAinda não há avaliações
- Gravitational Potential EnergyDocumento8 páginasGravitational Potential EnergyHaar TambalusiAinda não há avaliações
- Physics 1 - LESSON 7 (Mid - Spring 24)Documento8 páginasPhysics 1 - LESSON 7 (Mid - Spring 24)Md Muntassir Mahmud Khan ShakibAinda não há avaliações
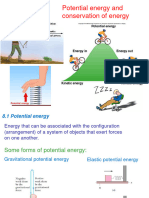
- Potential Energy and Conservation of EnergyDocumento16 páginasPotential Energy and Conservation of EnergyzakAinda não há avaliações
- Física I: Potential Energy and Conservation of EnergyDocumento30 páginasFísica I: Potential Energy and Conservation of EnergyJIGGONIAinda não há avaliações
- Ch8 LectureDocumento28 páginasCh8 Lectureecem avcıAinda não há avaliações
- 6 Work and Energy 1Documento14 páginas6 Work and Energy 1John Van Dave TaturoAinda não há avaliações
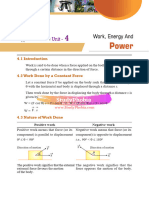
- Chapter 4 Points To RememberDocumento10 páginasChapter 4 Points To RememberSaksham YadavAinda não há avaliações
- 03 - Fundamentals of Physics - Naghi GasimovDocumento25 páginas03 - Fundamentals of Physics - Naghi GasimovKVP LyricsAinda não há avaliações
- Worksheet Week 5Documento4 páginasWorksheet Week 5Jaybie TejadaAinda não há avaliações
- WEEK 6 Potential EnergyDocumento10 páginasWEEK 6 Potential Energymaria1345Ainda não há avaliações
- Week 5 Work Energy PowerDocumento68 páginasWeek 5 Work Energy PowerShare linkAinda não há avaliações
- P101 Lec 0809Documento24 páginasP101 Lec 0809Dump HanzelAinda não há avaliações
- Lecture Powerpoints: Physics For Scientists and Engineers, With Modern Physics, 4 EditionDocumento46 páginasLecture Powerpoints: Physics For Scientists and Engineers, With Modern Physics, 4 EditionMuhammad HarisAinda não há avaliações
- Physics Project: Aman MaityDocumento17 páginasPhysics Project: Aman MaityAman MaityAinda não há avaliações
- Schriftelijke Opdrachten - Week 2 - SolutionsdocxDocumento3 páginasSchriftelijke Opdrachten - Week 2 - SolutionsdocxJorn HoekstraAinda não há avaliações
- Chap6 - Energy of A System (Cont.)Documento38 páginasChap6 - Energy of A System (Cont.)stu735113006Ainda não há avaliações
- Further Maths - Work, Energy and PowerDocumento1 páginaFurther Maths - Work, Energy and PowerLola SmithAinda não há avaliações
- PHYSICS21 Energy2Documento33 páginasPHYSICS21 Energy2api-3805293Ainda não há avaliações
- Physics ReviewerDocumento5 páginasPhysics ReviewerJohnny TestAinda não há avaliações
- 8Documento22 páginas8EA CatalanAinda não há avaliações
- Group 2Documento14 páginasGroup 2Xaviour Luis Mercurio CunananAinda não há avaliações
- EnergyDocumento36 páginasEnergyyuxing lieAinda não há avaliações
- Potential Energy 0Documento8 páginasPotential Energy 0nettextsAinda não há avaliações
- Positive Work Negative Work: Work, Energy and PowerDocumento38 páginasPositive Work Negative Work: Work, Energy and Powerpraveen.aicpAinda não há avaliações
- NSAA Specification 2021 PhysDocumento14 páginasNSAA Specification 2021 Phys/Mad As A Hatter /Ainda não há avaliações
- Revision: Previous Lecture Was About Applications of Euler-Lagrange Equations Euler-Lagrange Equations (Different Forms)Documento24 páginasRevision: Previous Lecture Was About Applications of Euler-Lagrange Equations Euler-Lagrange Equations (Different Forms)ediealiAinda não há avaliações
- 43 - Topic1B - Properties of Gases - The Kinetic ModelDocumento8 páginas43 - Topic1B - Properties of Gases - The Kinetic ModelAeriel May PliegoAinda não há avaliações
- CHAPTER 12 - Kinetics of Particles Newton's Second LawDocumento43 páginasCHAPTER 12 - Kinetics of Particles Newton's Second Lawsirajulislam921354Ainda não há avaliações
- Potential Energy and Conservation of Energy: E U + K E Mechanical EnergyDocumento1 páginaPotential Energy and Conservation of Energy: E U + K E Mechanical EnergyBellay KaleesiyAinda não há avaliações
- Mechanical Energy Class 11 ProjectDocumento11 páginasMechanical Energy Class 11 ProjectAnkita Kumari50% (2)
- Physics Kinetics 4Documento60 páginasPhysics Kinetics 4Hnz CodiAinda não há avaliações
- AS Physics - Revision Notes Unit 1 - Mechanics and RadioactivityDocumento3 páginasAS Physics - Revision Notes Unit 1 - Mechanics and RadioactivityRakibul Islam RanaAinda não há avaliações
- Lecture Ch08Documento46 páginasLecture Ch08Danila SaraninAinda não há avaliações
- Work, Power, Energy WorksheetDocumento6 páginasWork, Power, Energy WorksheetDato Dato DatoAinda não há avaliações
- Science 9-Teacher-Made-Module-Quarter 4-Week 5Documento2 páginasScience 9-Teacher-Made-Module-Quarter 4-Week 5Ricky Peñaroyo VentozaAinda não há avaliações
- Φ) and kinetic energy (E: Mechanical energy General non-relativistic mechanicsDocumento7 páginasΦ) and kinetic energy (E: Mechanical energy General non-relativistic mechanicsRam kripa shaAinda não há avaliações
- Vibration Engineering: By: Engr. Ray H. MalonjaoDocumento15 páginasVibration Engineering: By: Engr. Ray H. MalonjaoEdrianCliffDelPilarAinda não há avaliações
- Chapter 8Documento33 páginasChapter 8Mustafa FarragAinda não há avaliações
- 1 - Transmission System Reactive PowerDocumento2 páginas1 - Transmission System Reactive PowerJorge RuizAinda não há avaliações
- Forms of EnergyDocumento8 páginasForms of EnergyJingyiAinda não há avaliações
- Open ES-1-Handout 2Documento61 páginasOpen ES-1-Handout 2JANINA CHRISTELLE ORMITAAinda não há avaliações
- Lecture 10 Linear Momentum and CollisionsDocumento42 páginasLecture 10 Linear Momentum and CollisionsEryka LynnAinda não há avaliações
- LESSON 2.11 Understanding ElasticityDocumento12 páginasLESSON 2.11 Understanding Elasticitychekgu_2007Ainda não há avaliações
- Advanced Mechanism Design (Ue19Me544) : Potential Energy Kinetic Energy Conservation of EnergyDocumento1 páginaAdvanced Mechanism Design (Ue19Me544) : Potential Energy Kinetic Energy Conservation of EnergySyed Hafeez Peeran QuadriAinda não há avaliações
- Energy, Energy Transfer, and General Energy Analysis: Thermodynamics: An Engineering ApproachDocumento41 páginasEnergy, Energy Transfer, and General Energy Analysis: Thermodynamics: An Engineering Approachجعفر السلطانAinda não há avaliações
- ME1402 Mechatronics Unit - 3Documento71 páginasME1402 Mechatronics Unit - 3Sandheep Radhakrishnan100% (7)
- Potential Energy PDFDocumento14 páginasPotential Energy PDFCancele RoleAinda não há avaliações
- Kinetics of ParticleDocumento20 páginasKinetics of ParticleAkankshaAinda não há avaliações
- 2019 Work, Energy, Power Lecture (Teacher)Documento25 páginas2019 Work, Energy, Power Lecture (Teacher)Wee Chee LimAinda não há avaliações
- Week 5 Work Energy PowerDocumento67 páginasWeek 5 Work Energy PowerRizky Ardias DarmawanAinda não há avaliações
- Unit-I Mechanics PDFDocumento81 páginasUnit-I Mechanics PDFGundanAinda não há avaliações
- GenPhysics 1Documento4 páginasGenPhysics 1Mary Harry Dela CruzAinda não há avaliações
- CH 11Documento17 páginasCH 11Kaleb GreenAinda não há avaliações
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 6: Gravitational and Inertial Control, #6No EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 6: Gravitational and Inertial Control, #6Ainda não há avaliações
- Atag PDFDocumento80 páginasAtag PDFyusuf efendiAinda não há avaliações
- MEDIA RELEASE 260711 AviationEnvironmentLatAmDocumento2 páginasMEDIA RELEASE 260711 AviationEnvironmentLatAmyusuf efendiAinda não há avaliações
- Motion Along A Straight Line: Displacement Is A Vector QuantityDocumento8 páginasMotion Along A Straight Line: Displacement Is A Vector Quantityyusuf efendiAinda não há avaliações
- Phys101 ch03 Vectors 6pDocumento6 páginasPhys101 ch03 Vectors 6pyusuf efendiAinda não há avaliações
- Phys101 Ch09 CenterofMas LinMomentum 8pDocumento8 páginasPhys101 Ch09 CenterofMas LinMomentum 8pyusuf efendiAinda não há avaliações
- SensitivityDocumento7 páginasSensitivityyusuf efendiAinda não há avaliações
- Phys101 ch07 KinEnergy Work 7pDocumento7 páginasPhys101 ch07 KinEnergy Work 7pyusuf efendiAinda não há avaliações
- Energy and Energy TransferDocumento14 páginasEnergy and Energy Transferyusuf efendiAinda não há avaliações
- New 10 Fluid MechanicsDocumento22 páginasNew 10 Fluid Mechanicsyusuf efendiAinda não há avaliações
- Linear Momentum and CollisionsDocumento16 páginasLinear Momentum and Collisionsyusuf efendiAinda não há avaliações
- Phys101 Ch01 Measurement 4pDocumento4 páginasPhys101 Ch01 Measurement 4pyusuf efendiAinda não há avaliações
- New 4 HK NewtonDocumento20 páginasNew 4 HK Newtonyusuf efendiAinda não há avaliações
- New 2 Gerak 1 DimensiDocumento20 páginasNew 2 Gerak 1 Dimensiyusuf efendiAinda não há avaliações
- DB Singh - MASTER RESOURCE BOOK FOR JEE MAIN PhysicsDocumento7 páginasDB Singh - MASTER RESOURCE BOOK FOR JEE MAIN PhysicsBadri Narayan MishraAinda não há avaliações
- Pe KeDocumento15 páginasPe KeTaufik PamisAinda não há avaliações
- Lift and Escalator Motor Sizing With Calculations and ExamplesDocumento22 páginasLift and Escalator Motor Sizing With Calculations and ExamplesjayakumarAinda não há avaliações
- Name: Willy Pratama NIM: 151424006 Study Program: Physics EducationDocumento6 páginasName: Willy Pratama NIM: 151424006 Study Program: Physics EducationWilly PratamaAinda não há avaliações
- Mechanics Formula SheetDocumento1 páginaMechanics Formula Sheetej_00017Ainda não há avaliações
- Parametric Study of Gasification Processes in A BFB Coal GasifierDocumento16 páginasParametric Study of Gasification Processes in A BFB Coal GasifierAvinash VasudeoAinda não há avaliações
- Activity No. 2 Procedures and Data GatheringDocumento17 páginasActivity No. 2 Procedures and Data GatheringJeford ManisanAinda não há avaliações
- PHY 1101 Physics1 - Course Outline (Spring 2023-2024)Documento9 páginasPHY 1101 Physics1 - Course Outline (Spring 2023-2024)faisalfahim228Ainda não há avaliações
- Engineering Mechanics: Second PartDocumento18 páginasEngineering Mechanics: Second Partاحمد سلمان عزيز , مسائيCAinda não há avaliações
- Stratos Lafcharis Aristomenis Theory On LightDocumento19 páginasStratos Lafcharis Aristomenis Theory On LightpaograuAinda não há avaliações
- Questions: Air With InitialDocumento3 páginasQuestions: Air With Initialgaylord gaysonAinda não há avaliações
- Work Power Energy Exams1Documento9 páginasWork Power Energy Exams1Jordan CompraAinda não há avaliações
- New Microsoft Word DocumentDocumento3 páginasNew Microsoft Word DocumentraorhtAinda não há avaliações
- Work, Power and Energy: Summary and Practice Applications of Basic Physics SkillsDocumento4 páginasWork, Power and Energy: Summary and Practice Applications of Basic Physics SkillsMrsriyansyahAinda não há avaliações
- Energy Is The Capacity of Matter To Perform Work As The ResultDocumento2 páginasEnergy Is The Capacity of Matter To Perform Work As The ResultJhune Dominique GalangAinda não há avaliações
- Special Relativity PDFDocumento6 páginasSpecial Relativity PDFJaki UmamAinda não há avaliações
- List of Dimensionless NumberDocumento7 páginasList of Dimensionless NumberFebio DalantaAinda não há avaliações
- Module 11 Work, Energy, Power and MachinesDocumento44 páginasModule 11 Work, Energy, Power and MachinesJudy Panguito Aralar100% (2)
- Rube Goldberg Lesson PlansDocumento15 páginasRube Goldberg Lesson PlansanusridharAinda não há avaliações
- Chapter 8-Work, Power and EnergyDocumento6 páginasChapter 8-Work, Power and EnergyLesther James CastroAinda não há avaliações
- Lab L02: Introduction To C++ Programming: BEJ10102 Computer Programming Semester 1, Session 20202021Documento11 páginasLab L02: Introduction To C++ Programming: BEJ10102 Computer Programming Semester 1, Session 20202021Hari HaranAinda não há avaliações
- Conservation of Linear MomentumDocumento15 páginasConservation of Linear MomentumSiddharth Acharya100% (1)
- Momentum Practice SolutionsDocumento15 páginasMomentum Practice SolutionsMax Derp NgAinda não há avaliações
- Work, Energy, and POWER: Science, Technology, Engineering, and MathematicsDocumento48 páginasWork, Energy, and POWER: Science, Technology, Engineering, and MathematicsJomar BacaniAinda não há avaliações
- Potential EnergyDocumento28 páginasPotential EnergyHéMàn-th Pùlágànti100% (1)
- PHY 101L Autumn 19Documento47 páginasPHY 101L Autumn 19Samuel Muabia PlānetAinda não há avaliações
- CE-2101 Fluid Mechanics: Energy Consideration in Steady FlowDocumento53 páginasCE-2101 Fluid Mechanics: Energy Consideration in Steady FlowShaheer RizwanAinda não há avaliações
- 9 Science Work and Energy Test 01Documento1 página9 Science Work and Energy Test 01Dev RajuAinda não há avaliações
- Classification of EnergyDocumento2 páginasClassification of EnergyLeech SlaveAinda não há avaliações