Você também pode gostar
- 116 hw1Documento5 páginas116 hw1thermopolis3012Ainda não há avaliações
- Numerical Integration N6Documento23 páginasNumerical Integration N6HayderyAinda não há avaliações
- Curve and Surface Fitting Models Based On The Diagonalizable Differential SystemsDocumento26 páginasCurve and Surface Fitting Models Based On The Diagonalizable Differential SystemsLayla VuAinda não há avaliações
- Line Circle AlgorithmDocumento33 páginasLine Circle Algorithmaerobala16Ainda não há avaliações
- EOI2022 Math2Documento3 páginasEOI2022 Math2Mohamed El-SherifAinda não há avaliações
- Math 1050 Project 3 Linear Least Squares ApproximationDocumento9 páginasMath 1050 Project 3 Linear Least Squares Approximationapi-233311543Ainda não há avaliações
- HW4 S12 SolDocumento6 páginasHW4 S12 SolaakankshasssAinda não há avaliações
- MainDocumento19 páginasMainAllan PanAinda não há avaliações
- MT512 - Assignment 1Documento10 páginasMT512 - Assignment 1Azeem SatharAinda não há avaliações
- 3.2.3 Newton's Divided Difference Interpolation: Lagrange Method Has The Following WeaknessesDocumento31 páginas3.2.3 Newton's Divided Difference Interpolation: Lagrange Method Has The Following WeaknessesKhairulAinda não há avaliações
- Max Cut Problem: Daniel NatapovDocumento25 páginasMax Cut Problem: Daniel NatapovskelskelAinda não há avaliações
- Solution - Sample Questions - TNQT Digital-4July19Documento13 páginasSolution - Sample Questions - TNQT Digital-4July19cherukuAinda não há avaliações
- Cubic SplinesDocumento6 páginasCubic SplinesAleksa Aki LazarevicAinda não há avaliações
- DS SecondMidtermDocumento17 páginasDS SecondMidtermTetricx The firstAinda não há avaliações
- UntitledDocumento10 páginasUntitledapi-98380389Ainda não há avaliações
- Backtracking: General MethodDocumento68 páginasBacktracking: General Methodsantosh.parsaAinda não há avaliações
- Calculus 07 IntegralDocumento87 páginasCalculus 07 Integralbudi_ummAinda não há avaliações
- Workbook AnswersDocumento80 páginasWorkbook AnswersSim Ping PingAinda não há avaliações
- Problem Tutorial: "Salty Fish"Documento3 páginasProblem Tutorial: "Salty Fish"Roberto FrancoAinda não há avaliações
- System and Straight Line Equation: Distance FormulaDocumento13 páginasSystem and Straight Line Equation: Distance Formulamintchoco98Ainda não há avaliações
- Putnam Linear AlgebraDocumento6 páginasPutnam Linear AlgebrainfinitesimalnexusAinda não há avaliações
- CGM Unit 2 Question BankDocumento11 páginasCGM Unit 2 Question BankAbhishek KumarAinda não há avaliações
- Calculus 2 Final ExamDocumento8 páginasCalculus 2 Final Examtevin sessaAinda não há avaliações
- HW1 2014Documento6 páginasHW1 2014Anonymous ewKJI4xUAinda não há avaliações
- 2.6 NotesDocumento5 páginas2.6 NotesRajesh VeeraAinda não há avaliações
- Exam Diferential Calculus 3Documento3 páginasExam Diferential Calculus 3lllloAinda não há avaliações
- Midterm Practice Problems: N N 1 N 2 N 3 N 4Documento10 páginasMidterm Practice Problems: N N 1 N 2 N 3 N 4Lionel CarlosAinda não há avaliações
- Volume 15, Number 2, Pages 95-131 ISSN 1715-0868Documento37 páginasVolume 15, Number 2, Pages 95-131 ISSN 1715-0868Carla MirandaAinda não há avaliações
- EMTH201 Engineering Mathematics 1-Assignment 2-Due 14MAR2016-modified On 10MAR2016Documento1 páginaEMTH201 Engineering Mathematics 1-Assignment 2-Due 14MAR2016-modified On 10MAR2016Thuso TiroAinda não há avaliações
- R ExercisesDocumento35 páginasR ExercisesAti SundarAinda não há avaliações
- Final Sol 4O03 16Documento4 páginasFinal Sol 4O03 16MaherKAinda não há avaliações
- Question Bank For Module 3Documento3 páginasQuestion Bank For Module 3Raj GaneshAinda não há avaliações
- MohemDocumento6 páginasMohemdaimon_pAinda não há avaliações
- Computer Graphics 3: 2D Transformations: Course WebsiteDocumento27 páginasComputer Graphics 3: 2D Transformations: Course WebsiteAhmed JavedAinda não há avaliações
- Caringal Activity 9 Application of System of Linear EquationDocumento13 páginasCaringal Activity 9 Application of System of Linear EquationDummy AccAinda não há avaliações
- Grids: Steven SkienaDocumento19 páginasGrids: Steven SkienaPusat Tuisyen Bestari IlmuAinda não há avaliações
- Iterative Methods For Solving Ax B - Jacobi's MethodDocumento4 páginasIterative Methods For Solving Ax B - Jacobi's MethodJommel GonzalesAinda não há avaliações
- D Ifferential Calculus - Math I Session - 1: Find The Equation of The Circle With Centre (-A,-B) and Radius (A - BDocumento4 páginasD Ifferential Calculus - Math I Session - 1: Find The Equation of The Circle With Centre (-A,-B) and Radius (A - BAstha SrivastavaAinda não há avaliações
- Matrix DeterminantDocumento4 páginasMatrix DeterminantMinh Nguyễn HoàngAinda não há avaliações
- Calculus Stewart 7th Edition Solutions ManualDocumento45 páginasCalculus Stewart 7th Edition Solutions ManualCindyCurrydwqzr100% (75)
- Mechanics of Solids Week 10 LecturesDocumento9 páginasMechanics of Solids Week 10 LecturesFlynn GouldAinda não há avaliações
- Curve Fitting II: PolynomialDocumento7 páginasCurve Fitting II: PolynomialEngr Fawad WaliAinda não há avaliações
- Mipt 2014 Burunduk1.EnDocumento5 páginasMipt 2014 Burunduk1.EnVishal GolchaAinda não há avaliações
- Linear Algebra LecturesDocumento185 páginasLinear Algebra Lecturesnislam57Ainda não há avaliações
- SAMSA Journal Vol 4 Pp61 78 Thankane StysDocumento17 páginasSAMSA Journal Vol 4 Pp61 78 Thankane StysgerritgrootAinda não há avaliações
- Problem Tutorial: "Dress To Impress"Documento8 páginasProblem Tutorial: "Dress To Impress"Roberto FrancoAinda não há avaliações
- Form 3 44 Quadratic Equations and Graphs1Documento22 páginasForm 3 44 Quadratic Equations and Graphs1abhayAinda não há avaliações
- CG AssDocumento17 páginasCG Asssamuel fikiruAinda não há avaliações
- Past Paper 10015 21 - SDocumento32 páginasPast Paper 10015 21 - SYang ZhouAinda não há avaliações
- Laue & Bravis Crystal LatticeDocumento18 páginasLaue & Bravis Crystal LatticeRSLAinda não há avaliações
- Daa Unit Vi NotesDocumento15 páginasDaa Unit Vi NotesPoorvaAinda não há avaliações
- AP Calculus PrincetonReview ProblemsDocumento75 páginasAP Calculus PrincetonReview ProblemsRana MukherjeeAinda não há avaliações
- GCRT 2Documento15 páginasGCRT 2Maria Victoria NavarroAinda não há avaliações
- Numerical Solution of Ordinary Differential Equations Part 5 - Least Square RegressionDocumento23 páginasNumerical Solution of Ordinary Differential Equations Part 5 - Least Square RegressionMelih TecerAinda não há avaliações
- Unit-Vi - Backtracking: Domain of V Solution Space of The Problem. The Validity Criteria Used in CheckingDocumento26 páginasUnit-Vi - Backtracking: Domain of V Solution Space of The Problem. The Validity Criteria Used in CheckingAshriti JainAinda não há avaliações
- A-level Maths Revision: Cheeky Revision ShortcutsNo EverandA-level Maths Revision: Cheeky Revision ShortcutsNota: 3.5 de 5 estrelas3.5/5 (8)
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"No EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Nota: 2.5 de 5 estrelas2.5/5 (2)
- Transformation of Axes (Geometry) Mathematics Question BankNo EverandTransformation of Axes (Geometry) Mathematics Question BankNota: 3 de 5 estrelas3/5 (1)
- Come Ricavare I Nomi Degli Angeli E Dei Demoni Nella Divinazione Con I Quadrati Magici, A M - ZDocumento15 páginasCome Ricavare I Nomi Degli Angeli E Dei Demoni Nella Divinazione Con I Quadrati Magici, A M - ZDavid BergeAinda não há avaliações
- Neurotransmitter Receptor Localization: From Autoradiography To Imaging Mass SpectrometryDocumento12 páginasNeurotransmitter Receptor Localization: From Autoradiography To Imaging Mass SpectrometryDavid BergeAinda não há avaliações
- A Picturesque Maze Generation Algorithm With Any Given EndpointsDocumento5 páginasA Picturesque Maze Generation Algorithm With Any Given EndpointsDavid BergeAinda não há avaliações
- Instructions On Firmware V1.03 PDFDocumento1 páginaInstructions On Firmware V1.03 PDFDavid BergeAinda não há avaliações
- Text Modication Methods For Natural Language Generation: Universitat Autònoma de BarcelonaDocumento44 páginasText Modication Methods For Natural Language Generation: Universitat Autònoma de BarcelonaDavid BergeAinda não há avaliações
- Towards High Speed Grammar Induction On Large Text CorporaDocumento14 páginasTowards High Speed Grammar Induction On Large Text CorporaDavid BergeAinda não há avaliações
- FTP PDFDocumento11 páginasFTP PDFDavid BergeAinda não há avaliações
- Grey Situation Decision-Making For Priority Project of Sustainable Forest Management in Jing'An, Jiangxi, ChinaDocumento6 páginasGrey Situation Decision-Making For Priority Project of Sustainable Forest Management in Jing'An, Jiangxi, ChinaDavid BergeAinda não há avaliações
- Quick Archetypal Symbol Generation Test FinalDocumento4 páginasQuick Archetypal Symbol Generation Test FinalDavid BergeAinda não há avaliações
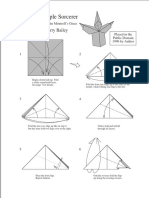
- The Simple Sorcerer: by Perry BaileyDocumento2 páginasThe Simple Sorcerer: by Perry BaileyDavid Berge0% (1)
- PhDThesis AttilaReissDocumento187 páginasPhDThesis AttilaReissDavid BergeAinda não há avaliações
- Dimensional Analysis Lab - Making FudgeDocumento2 páginasDimensional Analysis Lab - Making FudgeDavid BergeAinda não há avaliações
- Columbine PDFDocumento3 páginasColumbine PDFPrichindel MorocanosAinda não há avaliações
- Prediction of The Successfulness of Tennis Players With Machine Learning MethodsDocumento9 páginasPrediction of The Successfulness of Tennis Players With Machine Learning MethodsDavid BergeAinda não há avaliações
- User Manual PM3250Documento80 páginasUser Manual PM3250otavioalcaldeAinda não há avaliações
- Speed, Velocity & Acceleration (Physics Report)Documento66 páginasSpeed, Velocity & Acceleration (Physics Report)Kristian Dave DivaAinda não há avaliações
- HSCC SRH 0705 PDFDocumento1 páginaHSCC SRH 0705 PDFBhawna KapoorAinda não há avaliações
- HRMDocumento118 páginasHRMKarthic KasiliaAinda não há avaliações
- Beyond "The Arc of Freedom and Prosperity": Debating Universal Values in Japanese Grand StrategyDocumento9 páginasBeyond "The Arc of Freedom and Prosperity": Debating Universal Values in Japanese Grand StrategyGerman Marshall Fund of the United StatesAinda não há avaliações
- How To Convert Files To Binary FormatDocumento1 páginaHow To Convert Files To Binary FormatAhmed Riyadh100% (1)
- Notes On Antibodies PropertiesDocumento3 páginasNotes On Antibodies PropertiesBidur Acharya100% (1)
- Virtual Assets Act, 2022Documento18 páginasVirtual Assets Act, 2022Rapulu UdohAinda não há avaliações
- Financial Management 2E: Rajiv Srivastava - Dr. Anil Misra Solutions To Numerical ProblemsDocumento5 páginasFinancial Management 2E: Rajiv Srivastava - Dr. Anil Misra Solutions To Numerical ProblemsParesh ShahAinda não há avaliações
- Electronic Spin Inversion: A Danger To Your HealthDocumento4 páginasElectronic Spin Inversion: A Danger To Your Healthambertje12Ainda não há avaliações
- Hazardous Locations: C.E.C. ClassificationsDocumento4 páginasHazardous Locations: C.E.C. ClassificationsThananuwat SuksaroAinda não há avaliações
- Adjective & VerbsDocumento3 páginasAdjective & VerbsDennis BerkAinda não há avaliações
- Top 100 Chemical CompaniesDocumento11 páginasTop 100 Chemical Companiestawhide_islamicAinda não há avaliações
- A Review of Service Quality ModelsDocumento8 páginasA Review of Service Quality ModelsJimmiJini100% (1)
- Iaea Tecdoc 1092Documento287 páginasIaea Tecdoc 1092Andres AracenaAinda não há avaliações
- Draft PDFDocumento166 páginasDraft PDFashwaq000111Ainda não há avaliações
- DMIT - Midbrain - DMIT SoftwareDocumento16 páginasDMIT - Midbrain - DMIT SoftwarevinAinda não há avaliações
- Aakriti 1Documento92 páginasAakriti 1raghav bansalAinda não há avaliações
- Form Expense ClaimDocumento2 páginasForm Expense Claimviedelamonde_3868443Ainda não há avaliações
- Segregation in CastingDocumento17 páginasSegregation in CastingAsmaa Smsm Abdallh78% (9)
- 1.water, Acids, Bases, Buffer Solutions in BiochemistryDocumento53 páginas1.water, Acids, Bases, Buffer Solutions in BiochemistryÇağlaAinda não há avaliações
- A Medium-Rise Residential Building: A B C E D F G HDocumento3 páginasA Medium-Rise Residential Building: A B C E D F G HBabyjhaneTanItmanAinda não há avaliações
- Colorfastness of Zippers To Light: Standard Test Method ForDocumento2 páginasColorfastness of Zippers To Light: Standard Test Method ForShaker QaidiAinda não há avaliações
- Internship Report Format For Associate Degree ProgramDocumento5 páginasInternship Report Format For Associate Degree ProgramBisma AmjaidAinda não há avaliações
- Project Formulation and Appraisalpdf PDFDocumento12 páginasProject Formulation and Appraisalpdf PDFabhijeet varadeAinda não há avaliações
- Stentofon Pulse: IP Based Intercom SystemDocumento22 páginasStentofon Pulse: IP Based Intercom SystemCraigAinda não há avaliações
- 1995 Biology Paper I Marking SchemeDocumento13 páginas1995 Biology Paper I Marking Schemetramysss100% (2)
- I I Formularies Laundry Commercial Liquid Detergents 110-12-020 USDocumento6 páginasI I Formularies Laundry Commercial Liquid Detergents 110-12-020 USfaissalAinda não há avaliações
- Business-Communication Solved MCQs (Set-3)Documento8 páginasBusiness-Communication Solved MCQs (Set-3)Pavan Sai Krishna KottiAinda não há avaliações
- Product NDC # Compare To Strength Size Form Case Pack Abcoe# Cardinal Cin # Mckesson Oe # M&Doe#Documento14 páginasProduct NDC # Compare To Strength Size Form Case Pack Abcoe# Cardinal Cin # Mckesson Oe # M&Doe#Paras ShardaAinda não há avaliações