Você também pode gostar
- UNIDAD II. Tensión y Deformación Plana - Semana 3 - Grupo I y II - Resistencia de Materiales - UNHEVAL PDFDocumento35 páginasUNIDAD II. Tensión y Deformación Plana - Semana 3 - Grupo I y II - Resistencia de Materiales - UNHEVAL PDFEric ManuelAinda não há avaliações
- UNIDAD II - Tensión y Deformación Plana - Sesión 5 - Resistencia de Materiales - Grupo 1 - UNHEVALDocumento24 páginasUNIDAD II - Tensión y Deformación Plana - Sesión 5 - Resistencia de Materiales - Grupo 1 - UNHEVALEric ManuelAinda não há avaliações
- Tema7 TensionesnaturalesDocumento69 páginasTema7 TensionesnaturalesMarco CarpioAinda não há avaliações
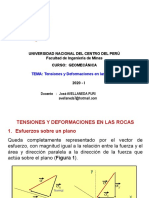
- Tensiones y Deformaciones en Las RocasDocumento21 páginasTensiones y Deformaciones en Las RocasraAinda não há avaliações
- Informe de Mecanica de SolidosDocumento10 páginasInforme de Mecanica de SolidosAngel Jesus Quintana AltamiranoAinda não há avaliações
- L.G. de HOOKEDocumento16 páginasL.G. de HOOKEronaldAinda não há avaliações
- Tensor EsfuerzosDocumento15 páginasTensor EsfuerzosDiego Castillo JaramilloAinda não há avaliações
- Morfologia Del TerrenoDocumento11 páginasMorfologia Del TerrenoNuria VidalAinda não há avaliações
- Elasticidad-03-Ley de HookeDocumento41 páginasElasticidad-03-Ley de HookeJonathan ReyesAinda não há avaliações
- Tensión tensor estado puntoDocumento7 páginasTensión tensor estado puntoAndreaAinda não há avaliações
- 03 Ley de Hooke Generalizada VFDocumento7 páginas03 Ley de Hooke Generalizada VFKashitokatatemoAinda não há avaliações
- Fundamentos de La Mecánica de Rocas - EsfuerzosDocumento19 páginasFundamentos de La Mecánica de Rocas - EsfuerzosAlex MarcilloAinda não há avaliações
- Transf Esfuerzos PDFDocumento4 páginasTransf Esfuerzos PDFjpablo69Ainda não há avaliações
- Mecanica de RocasDocumento22 páginasMecanica de RocasJuan RoblesAinda não há avaliações
- 1 - Esfuerzos y DeformacionesDocumento22 páginas1 - Esfuerzos y Deformacionesjuancaf773557Ainda não há avaliações
- RotacionDocumento37 páginasRotacionRENZO RANIEIRO CHUMPITASI SANTANAAinda não há avaliações
- Esfuerzos CombinadosDocumento17 páginasEsfuerzos CombinadosDiego CarapiaAinda não há avaliações
- Capitulo 4 B Leyes Newton Aplicaciones IIDocumento19 páginasCapitulo 4 B Leyes Newton Aplicaciones IIEdwin Pérez GarcíaAinda não há avaliações
- Tema7 TENSIONESNATURALESDocumento69 páginasTema7 TENSIONESNATURALESVinko Rodriguez DiazAinda não há avaliações
- Mat 1 Entrega 26Documento9 páginasMat 1 Entrega 26ChristianAinda não há avaliações
- Estados Tensionales 2018Documento23 páginasEstados Tensionales 2018franco toselloAinda não há avaliações
- Puntos en El Espacio, Trazas, Graficas de SuperficiesDocumento29 páginasPuntos en El Espacio, Trazas, Graficas de SuperficiesAlan LugoAinda não há avaliações
- Teoria General de Resistencia de MaterialesDocumento122 páginasTeoria General de Resistencia de MaterialesMara CristianAinda não há avaliações
- Tema 11 - Cinética Tridimensional de Un Cuerpo RígidoDocumento18 páginasTema 11 - Cinética Tridimensional de Un Cuerpo RígidoDARIO PANTI RAMOSAinda não há avaliações
- Fundamentos de La Mecánica de RocasDocumento29 páginasFundamentos de La Mecánica de RocasAlex MarcilloAinda não há avaliações
- Elasticidad y tensión - F.R.R. U.T.NDocumento14 páginasElasticidad y tensión - F.R.R. U.T.NAgustin BorriAinda não há avaliações
- Examen III de Matemáticas III de la Facultad de Ingeniería de la Unidad Central del Valle del CaucaDocumento1 páginaExamen III de Matemáticas III de la Facultad de Ingeniería de la Unidad Central del Valle del CaucaSebastiàn RugelesAinda não há avaliações
- Lección 9-1Documento22 páginasLección 9-1Emanuel Santa Cruz CasianoAinda não há avaliações
- Estado TensionalDocumento21 páginasEstado TensionalToshicoMoyaAinda não há avaliações
- Esfuerzos en Planos InclinadosDocumento13 páginasEsfuerzos en Planos InclinadosSheyla SalomeAinda não há avaliações
- 1-Tensor de DeformacionesDocumento36 páginas1-Tensor de DeformacionesJhan DAinda não há avaliações
- Taller Colaborativo Unidad #2Documento4 páginasTaller Colaborativo Unidad #2Julian Camilo Corredor GomezAinda não há avaliações
- Transformación - TensionesDocumento8 páginasTransformación - TensionesAaron GonzalezAinda não há avaliações
- Ecuaciones Constitutivas PDFDocumento16 páginasEcuaciones Constitutivas PDFAnonymous pHetqz1mWAinda não há avaliações
- Hoja de Ejercicios6y7NuevasDocumento2 páginasHoja de Ejercicios6y7NuevasAldo Martín FernándezAinda não há avaliações
- Tensiones en La Roca: TridimensionalDocumento7 páginasTensiones en La Roca: TridimensionalRoberto GarcíaAinda não há avaliações
- Funciones de Más de Una VariableDocumento11 páginasFunciones de Más de Una VariableJuan Carlos Rodríguez RufinoAinda não há avaliações
- Ley de Hooke Generalizada v2.0Documento14 páginasLey de Hooke Generalizada v2.0Jose ChoperenaAinda não há avaliações
- Circulo de MohrDocumento13 páginasCirculo de MohrJhony Coaguila GutierrezAinda não há avaliações
- Unidad IV FlexiónDocumento10 páginasUnidad IV Flexióncarlos Benjamín Penado segoviaAinda não há avaliações
- Clase 17 IntegralDocumento18 páginasClase 17 IntegralJhon Edison Bravo BuitragoAinda não há avaliações
- Esfuerzos y deformación en un puntoDocumento12 páginasEsfuerzos y deformación en un puntoSebastian SotoAinda não há avaliações
- Clase 06 Navier-StokesDocumento27 páginasClase 06 Navier-StokesJosé Carlos RamírezAinda não há avaliações
- Fadu - E1 - Dimens de Element Solicitados A Flexión Simple OblícuaDocumento11 páginasFadu - E1 - Dimens de Element Solicitados A Flexión Simple OblícuaFlorencia QuinterosAinda não há avaliações
- Superficies VILLENADocumento23 páginasSuperficies VILLENAjamartinez57Ainda não há avaliações
- Superficies VILLENADocumento23 páginasSuperficies VILLENAThe Cree- PersAinda não há avaliações
- Transformacion de Esfuerzos en El PlanoDocumento9 páginasTransformacion de Esfuerzos en El PlanoDeyci MendozaAinda não há avaliações
- 01-Analisis de Esfuerzos-Parte 1Documento25 páginas01-Analisis de Esfuerzos-Parte 1JHONATAN ALEXANDER ROSALES PORTILLAAinda não há avaliações
- Modelos de Regresión Lineal Simple-ResumenDocumento5 páginasModelos de Regresión Lineal Simple-ResumenJericoAinda não há avaliações
- Tema - 9 - Espacio AfínDocumento10 páginasTema - 9 - Espacio AfínIgnacio OrgazAinda não há avaliações
- Infografia Una Familia de Lineas RectasDocumento1 páginaInfografia Una Familia de Lineas RectasPanda TequieroAinda não há avaliações
- Determinacion de Las Coordenadas Del Centro de CorteDocumento21 páginasDeterminacion de Las Coordenadas Del Centro de Corteeduardo100% (1)
- Sesión 4Documento35 páginasSesión 4Andy García VillavicencioAinda não há avaliações
- Resistencia de MaterialesDocumento7 páginasResistencia de MaterialesAmberAinda não há avaliações
- Capitulo 7 RM 2021BDocumento22 páginasCapitulo 7 RM 2021BMaría Angélica ChancusigAinda não há avaliações
- Informe GeoestadisticaDocumento5 páginasInforme GeoestadisticaMarchena Estrada FiladelfioAinda não há avaliações
- Geología Del PeruDocumento64 páginasGeología Del PeruMarchena Estrada FiladelfioAinda não há avaliações
- Informe GeoestadisticaDocumento5 páginasInforme GeoestadisticaMarchena Estrada FiladelfioAinda não há avaliações
- Geofisica MetELectrDocumento48 páginasGeofisica MetELectrpepichoAinda não há avaliações
- Área de Trabajo - Computación AplicadaDocumento27 páginasÁrea de Trabajo - Computación AplicadaHenry Sánchez CelisAinda não há avaliações
- Tipos de Alteracion PDFDocumento4 páginasTipos de Alteracion PDFalbertttAinda não há avaliações
- Examen de AuditoriaDocumento7 páginasExamen de AuditoriaMarchena Estrada FiladelfioAinda não há avaliações
- P I C-Cap Ii 1-10Documento29 páginasP I C-Cap Ii 1-10Marchena Estrada FiladelfioAinda não há avaliações
- Practica de Auditoria I DesarrolladoDocumento4 páginasPractica de Auditoria I DesarrolladoMarchena Estrada FiladelfioAinda não há avaliações
- Ge0estadistica PDFDocumento3 páginasGe0estadistica PDFMarchena Estrada FiladelfioAinda não há avaliações
- Estudio Geofisico (Refraccion Sismica y TomografÍa Eléctrica)Documento49 páginasEstudio Geofisico (Refraccion Sismica y TomografÍa Eléctrica)EDDY DE JESUS JUNIOR ROJAS CASTILLOAinda não há avaliações
- Cuent AsDocumento2 páginasCuent AsMarchena Estrada FiladelfioAinda não há avaliações
- Cap II Exploracio HCDocumento64 páginasCap II Exploracio HCMarchena Estrada FiladelfioAinda não há avaliações
- Articulo Taludes PDFDocumento5 páginasArticulo Taludes PDFJunior Lino Mera CarrascoAinda não há avaliações
- Características de La Roca AlmacenDocumento56 páginasCaracterísticas de La Roca AlmacenMarchena Estrada FiladelfioAinda não há avaliações
- 2 Hoja LaboratorioDocumento30 páginas2 Hoja LaboratorioHansAinda não há avaliações
- Trampas PetroliferasDocumento49 páginasTrampas PetroliferasMarchena Estrada FiladelfioAinda não há avaliações
- Practica Del Efectivo Seguna ParteDocumento4 páginasPractica Del Efectivo Seguna ParteMarchena Estrada FiladelfioAinda não há avaliações
- Cortes GeológicosDocumento8 páginasCortes GeológicosAnonymous iOaluenh100% (1)
- Trampas PetroliferasDocumento49 páginasTrampas PetroliferasMarchena Estrada FiladelfioAinda não há avaliações
- Brecha SDocumento50 páginasBrecha SMarchena Estrada FiladelfioAinda não há avaliações
- UNIDAD V CronoestratigráficasDocumento57 páginasUNIDAD V CronoestratigráficasCristhian Dany Gallardo MarianoAinda não há avaliações
- Criterios de Rotura-V2Documento45 páginasCriterios de Rotura-V2Marchena Estrada FiladelfioAinda não há avaliações
- Unidad III Procesos Magamatico Hidrotermales.Documento52 páginasUnidad III Procesos Magamatico Hidrotermales.Marchena Estrada FiladelfioAinda não há avaliações
- 1 TablasDocumento9 páginas1 TablasMarchena Estrada FiladelfioAinda não há avaliações
- Ensayos GeotecnicosDocumento36 páginasEnsayos GeotecnicosMarchena Estrada FiladelfioAinda não há avaliações
- Normas y unidades estratigráficasDocumento32 páginasNormas y unidades estratigráficasMarchena Estrada FiladelfioAinda não há avaliações
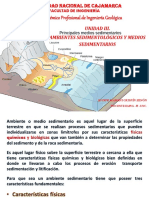
- Unidad III - Ambientes Sedimentarios-18Documento104 páginasUnidad III - Ambientes Sedimentarios-18Marchena Estrada Filadelfio100% (1)
- Correlación estratigráfica: métodos físicos y litológicosDocumento134 páginasCorrelación estratigráfica: métodos físicos y litológicosMarchena Estrada FiladelfioAinda não há avaliações
- Balance energético en sistemas electromecánicosDocumento34 páginasBalance energético en sistemas electromecánicosKevin BatzAinda não há avaliações
- Carta Abierta PDFDocumento2 páginasCarta Abierta PDFJoel Paredes SandreaAinda não há avaliações
- Guía de tutoría primariaDocumento41 páginasGuía de tutoría primariaLuis Quispe Cruz100% (1)
- La Ansiedad en El Deporte y Su Aplicación Practica Al AtletismoDocumento6 páginasLa Ansiedad en El Deporte y Su Aplicación Practica Al AtletismoRossana Contreras LeytonAinda não há avaliações
- Dinámicas Rompehielos para AdultosDocumento7 páginasDinámicas Rompehielos para AdultosBoris Zegarra0% (1)
- Humberto Maturana Las Emociones Son El Fundamento Del TodoDocumento6 páginasHumberto Maturana Las Emociones Son El Fundamento Del TodojomoramaAinda não há avaliações
- Marco Legal de La Sociedad Cooperativa - Stfe. CDMX.2017.0001Documento20 páginasMarco Legal de La Sociedad Cooperativa - Stfe. CDMX.2017.0001Yamile HernandezAinda não há avaliações
- Estructura Del MInisterio de Jovenes y AdolescentesDocumento8 páginasEstructura Del MInisterio de Jovenes y Adolescentesaggello100% (1)
- Prueba Parcial 2 Unidad 2 2do GF LatinoamericaDocumento4 páginasPrueba Parcial 2 Unidad 2 2do GF LatinoamericaMauricio Lavanderos MillanAinda não há avaliações
- Jose Antonio Vargas Eguez Tare3Documento6 páginasJose Antonio Vargas Eguez Tare3joseAinda não há avaliações
- Gordon AllportDocumento71 páginasGordon AllportRosaRojasAinda não há avaliações
- Matriz de Consistencia - Hernan SantosDocumento1 páginaMatriz de Consistencia - Hernan Santosalex santos21Ainda não há avaliações
- Anexo Semana 38 Promesas de Bendicion para La FamiliaDocumento4 páginasAnexo Semana 38 Promesas de Bendicion para La FamiliapcesarrozoAinda não há avaliações
- 04D03Documento28 páginas04D03TonynoMontañoAinda não há avaliações
- Importancia de Los Signos de PuntuacionDocumento2 páginasImportancia de Los Signos de PuntuacionCarlos Pesantez FrancoAinda não há avaliações
- Catálogo de Pernos Alta Resistencia ASTM A325Documento25 páginasCatálogo de Pernos Alta Resistencia ASTM A325Paula100% (1)
- 1231Documento12 páginas1231Yorklin LázaroAinda não há avaliações
- Palabras Diversas TRANSICIÓN (Primaria)Documento20 páginasPalabras Diversas TRANSICIÓN (Primaria)José Alirio PeñaAinda não há avaliações
- B2P8-DESARROLLO COGNITIVO SEGUN PIAGET-Semana 9Documento27 páginasB2P8-DESARROLLO COGNITIVO SEGUN PIAGET-Semana 9Marcello AndresAinda não há avaliações
- Compendio de Medios para La Ensenanza Del VoleibolDocumento21 páginasCompendio de Medios para La Ensenanza Del VoleibolneoraymixAinda não há avaliações
- Guia Teatro 2011Documento51 páginasGuia Teatro 2011Ángela FarfándelosGodos MartínezAinda não há avaliações
- Elementos Típicos Del PeculadoDocumento3 páginasElementos Típicos Del PeculadoBranko Yvancovich100% (1)
- Opinión Sobre El Estado en GuatemalaDocumento4 páginasOpinión Sobre El Estado en GuatemalaJose Js Raquec CujcujAinda não há avaliações
- Trabajo de Laboratorio de Empuje y FlotacionDocumento14 páginasTrabajo de Laboratorio de Empuje y Flotaciongilber escudero sullcaAinda não há avaliações
- Proyecto General de Práctica IntervenciónDocumento39 páginasProyecto General de Práctica IntervenciónAngie SalinasAinda não há avaliações
- Práctica - Verbos - RepasoDocumento2 páginasPráctica - Verbos - RepasoGuadalupe RodriguezAinda não há avaliações
- Sobre AptitudesDocumento9 páginasSobre AptitudesJose Luis Ventura LeonAinda não há avaliações
- Actividades Clase TDCDocumento7 páginasActividades Clase TDCMARINA MORENO DE LA SERNAAinda não há avaliações
- A T Ingles 1 BachDocumento14 páginasA T Ingles 1 BachRox PurdeaAinda não há avaliações
- Matemática IngenieríaDocumento3 páginasMatemática IngenieríaCristhian AmpudiaAinda não há avaliações