Você também pode gostar
- Armature Reaction in Synchronous Machines ExplainedDocumento6 páginasArmature Reaction in Synchronous Machines ExplainedÖnder PolatAinda não há avaliações
- Construction and operation of synchronous machinesDocumento53 páginasConstruction and operation of synchronous machinesPhilip IsholaAinda não há avaliações
- Alternators: Working PrincipleDocumento7 páginasAlternators: Working PrincipleQasimAinda não há avaliações
- EeDocumento2 páginasEesethi nagendrasundarAinda não há avaliações
- Ee 143-Module 1iDocumento18 páginasEe 143-Module 1iDELIZO ARNOLD LEMUEL S.Ainda não há avaliações
- AC Fundamentals Required Reading in Text Book: Chapter 4 - Steady State Analysis of Sinusoidal ExcitationDocumento7 páginasAC Fundamentals Required Reading in Text Book: Chapter 4 - Steady State Analysis of Sinusoidal ExcitationSteve ThomasAinda não há avaliações
- Ohm's Law & Kirchhoff's LawsDocumento18 páginasOhm's Law & Kirchhoff's LawsAkhilAinda não há avaliações
- 3 Synchronous PDFDocumento16 páginas3 Synchronous PDFASHOK P R kceAinda não há avaliações
- Ac CircuitDocumento18 páginasAc CircuitRocky BrazilAinda não há avaliações
- Full Pitch Coil:: C P P PDocumento12 páginasFull Pitch Coil:: C P P PAkashman ShakyaAinda não há avaliações
- Ch3 - Generator ModelDocumento61 páginasCh3 - Generator ModelShaan GomAinda não há avaliações
- Induction Motors Part ADocumento88 páginasInduction Motors Part AArpit PatelAinda não há avaliações
- Alternator EMF and Voltage RegulationDocumento22 páginasAlternator EMF and Voltage RegulationAlban Ronel D.Ainda não há avaliações
- 5TH Topic in 3 Phase Alternator March 2023Documento21 páginas5TH Topic in 3 Phase Alternator March 2023Alban Ronel D.Ainda não há avaliações
- Cse-I-Basic Electricals Engg. L3 PDFDocumento52 páginasCse-I-Basic Electricals Engg. L3 PDFDeeksha NaiduAinda não há avaliações
- Lecture 22 For Paper SavingDocumento10 páginasLecture 22 For Paper Savingعبد المهيمن احمد قصيAinda não há avaliações
- Electromagnetic Induction: Faraday's Laws and ApplicationsDocumento10 páginasElectromagnetic Induction: Faraday's Laws and ApplicationsDisha KatariaAinda não há avaliações
- Module 5 Lesson 3Documento21 páginasModule 5 Lesson 3IceAinda não há avaliações
- Chapter3-Single Phase ACDocumento58 páginasChapter3-Single Phase ACBrian LiAinda não há avaliações
- Electromagnetic inductionDocumento11 páginasElectromagnetic inductionbhattaraikushal05Ainda não há avaliações
- Lecture Notes On SYNCHRONOUS GENERATORDocumento72 páginasLecture Notes On SYNCHRONOUS GENERATORJeremiahAinda não há avaliações
- Transformers PDFDocumento30 páginasTransformers PDFMichael Williams100% (1)
- Single Phase AC CircuitsDocumento29 páginasSingle Phase AC Circuitskali hembramAinda não há avaliações
- ET UNIT-1 TransformerDocumento16 páginasET UNIT-1 TransformerHacking SomethingAinda não há avaliações
- Circuit 2: Phasor: I. The Phasor Form of ImpedanceDocumento13 páginasCircuit 2: Phasor: I. The Phasor Form of ImpedanceShaina MabborangAinda não há avaliações
- Chapter 4Documento13 páginasChapter 4Siva KumarAinda não há avaliações
- Unit 1 Current GenerationDocumento39 páginasUnit 1 Current GenerationMuse PrintingAinda não há avaliações
- Lect 11machineDocumento6 páginasLect 11machinemohamed shalabyAinda não há avaliações
- Alternating Current: Peak Value and R.M.S ValueDocumento9 páginasAlternating Current: Peak Value and R.M.S ValueBinod KhatriAinda não há avaliações
- Lecture 15 - Unit 2 - Introduction To AC CircuitsDocumento13 páginasLecture 15 - Unit 2 - Introduction To AC CircuitsTushar SharmaAinda não há avaliações
- Alternator EMF and Voltage RegulationDocumento14 páginasAlternator EMF and Voltage RegulationJohn Vincent HubillaAinda não há avaliações
- Working Principle of A D.C Motor or How A D.C Motor RotatesDocumento3 páginasWorking Principle of A D.C Motor or How A D.C Motor RotatesXahid HasanAinda não há avaliações
- RLC CircuitsDocumento8 páginasRLC Circuitskamalino0% (1)
- Chapter 3 Generator Model: Synchronous GeneratorsDocumento60 páginasChapter 3 Generator Model: Synchronous GeneratorsMuhamad NorasyrafAinda não há avaliações
- Hazara UniversityDocumento7 páginasHazara UniversityAli KhokharAinda não há avaliações
- Accircuit1 PartIDocumento40 páginasAccircuit1 PartIriddhitadas9Ainda não há avaliações
- Alternating Current Circuits: Chapter ThreeDocumento18 páginasAlternating Current Circuits: Chapter ThreeTifano SebastianAinda não há avaliações
- Alternator at Various Loads, Armature Reaction & Voltage RegulationDocumento3 páginasAlternator at Various Loads, Armature Reaction & Voltage RegulationYash BansalAinda não há avaliações
- Topic - 4 - Torque Production by Vector MethodDocumento8 páginasTopic - 4 - Torque Production by Vector Methoddillon deonathAinda não há avaliações
- Chapter 3elecDocumento28 páginasChapter 3elecJibril JundiAinda não há avaliações
- Chapter 4 - Electromagnetic Induction For SharingDocumento42 páginasChapter 4 - Electromagnetic Induction For SharingTrisha Mae PerezAinda não há avaliações
- Problem Set-5: Electrodynamics and Electromagnetic WavesDocumento2 páginasProblem Set-5: Electrodynamics and Electromagnetic Wavesakshat shAinda não há avaliações
- BEEE Unit 2-Single Phase Ac Circuits NotesDocumento42 páginasBEEE Unit 2-Single Phase Ac Circuits NotesShreyash SargarAinda não há avaliações
- Ac Circuits Handout and TutorialsDocumento32 páginasAc Circuits Handout and TutorialsyaseenVision100% (1)
- S-17 3030 Lecture 5Documento22 páginasS-17 3030 Lecture 5el mouatez billah messiniAinda não há avaliações
- Chapter5 Part 3 Sinusoidal Current and VoltageDocumento46 páginasChapter5 Part 3 Sinusoidal Current and VoltageJOHN BRYNDON LANDICHOAinda não há avaliações
- Components of Electric Power SystemsDocumento21 páginasComponents of Electric Power SystemskpchakralaAinda não há avaliações
- Alternating Current NotesDocumento7 páginasAlternating Current NotesPHANINDRA MAinda não há avaliações
- Ee 143-Module 1iiDocumento22 páginasEe 143-Module 1iiDELIZO ARNOLD LEMUEL S.Ainda não há avaliações
- Skript 1Documento23 páginasSkript 1Jf ChenAinda não há avaliações
- Basic Elec AssignmentDocumento13 páginasBasic Elec AssignmentSharyn VillarezAinda não há avaliações
- Phy 6 NotesDocumento27 páginasPhy 6 Notesayaan ahmedAinda não há avaliações
- Bab III.2.1. Generator Sinkron (Lanjutan)Documento28 páginasBab III.2.1. Generator Sinkron (Lanjutan)Hariz AudirahmawanAinda não há avaliações
- 01 Electrical Parameter Periodic WaveDocumento15 páginas01 Electrical Parameter Periodic WaveYash MotianiAinda não há avaliações
- 47 Alternating CurrentDocumento26 páginas47 Alternating Currentanoopeluvathingal100Ainda não há avaliações
- Basic Electrical NotesDocumento58 páginasBasic Electrical NotesKamal Joshi100% (2)
- 23 - EmiDocumento16 páginas23 - EmiPratima MondalAinda não há avaliações
- Modern Electrical Installation for Craft StudentsNo EverandModern Electrical Installation for Craft StudentsNota: 4.5 de 5 estrelas4.5/5 (4)
- Electricity and Magnetism: Problems in Undergraduate PhysicsNo EverandElectricity and Magnetism: Problems in Undergraduate PhysicsNota: 5 de 5 estrelas5/5 (1)
- Speed Control of IM Using Rotor Resistance ControlDocumento4 páginasSpeed Control of IM Using Rotor Resistance ControlrAinda não há avaliações
- 2Documento6 páginas2Sairam SaiAinda não há avaliações
- 6 EE441 3 Phase Synchronous MotorsDocumento11 páginas6 EE441 3 Phase Synchronous MotorsFos AlharbiAinda não há avaliações
- MSBTET Winter 2017 Model Answer for DMT SubjectDocumento21 páginasMSBTET Winter 2017 Model Answer for DMT SubjectjohnAinda não há avaliações
- BHELDocumento17 páginasBHELraveeshxAinda não há avaliações
- Winding Resistance Measurement For Main Stator & Rotor, Exciter Stator & RotorDocumento11 páginasWinding Resistance Measurement For Main Stator & Rotor, Exciter Stator & RotorAnbuAinda não há avaliações
- Motor Protection Relay Using Thermal ModelsDocumento7 páginasMotor Protection Relay Using Thermal ModelsAlexander ToyoAinda não há avaliações
- Arburg Multilift v6 TD 528442 en GBDocumento28 páginasArburg Multilift v6 TD 528442 en GBKrzysiek PrusAinda não há avaliações
- Electrical & Power Control Charging System GuideDocumento24 páginasElectrical & Power Control Charging System GuideNapiAinda não há avaliações
- AC Motors FundamentalsDocumento22 páginasAC Motors FundamentalsInterogator5Ainda não há avaliações
- Automotive Charging System: Chapter FourDocumento23 páginasAutomotive Charging System: Chapter FourIsaac TesfayeAinda não há avaliações
- EE 2013 SolvedDocumento16 páginasEE 2013 SolvedJammalaVenkataramanaAinda não há avaliações
- Generator BasicsDocumento69 páginasGenerator Basicssujiv_sujiv1278Ainda não há avaliações
- Single-Phase Motors GuideDocumento32 páginasSingle-Phase Motors GuideUmar AftabAinda não há avaliações
- Maintenance of Electric MotorsDocumento6 páginasMaintenance of Electric MotorsEmilAinda não há avaliações
- Subsynchronous Oscillation Detection Using Microprocessor RelaysDocumento12 páginasSubsynchronous Oscillation Detection Using Microprocessor RelaysjeffguitarAinda não há avaliações
- Manufacturing of Turbo GeneratorDocumento27 páginasManufacturing of Turbo GeneratorNava Deep100% (2)
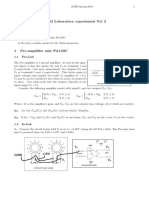
- EE352 Laboratory Experiment N# 2: 1.1 Pre-LabDocumento3 páginasEE352 Laboratory Experiment N# 2: 1.1 Pre-LabYassine DjillaliAinda não há avaliações
- Power 160 Brushless Outrunner Motor, 245Kv (EFLM4160A) - E-Flite - Advancing Electric FlightDocumento2 páginasPower 160 Brushless Outrunner Motor, 245Kv (EFLM4160A) - E-Flite - Advancing Electric FlightpoeminimoAinda não há avaliações
- rr222104 Elctrical and Electronics EngineeringDocumento8 páginasrr222104 Elctrical and Electronics EngineeringSRINIVASA RAO GANTAAinda não há avaliações
- Electrical TerminologiesDocumento10 páginasElectrical TerminologiesJohnRexAinda não há avaliações
- Topic 13 ServomechanismDocumento68 páginasTopic 13 Servomechanism516967% (3)
- Sai Vidya Institute of Technology: QuestionsDocumento7 páginasSai Vidya Institute of Technology: QuestionsSuprithaAinda não há avaliações
- HT SQUIRREL CAGE INDUCTION MOTORSDocumento11 páginasHT SQUIRREL CAGE INDUCTION MOTORSGopalMahantaAinda não há avaliações
- Three Phase Induction Motors: List of FormulaeDocumento9 páginasThree Phase Induction Motors: List of FormulaekkkAinda não há avaliações
- Handling Systems Fascinating MovementDocumento8 páginasHandling Systems Fascinating MovementAnonymous CYdagIAinda não há avaliações
- Wind Turbine ManualDocumento19 páginasWind Turbine Manualwizardgrt1Ainda não há avaliações
- 01 Electrical BasicsDocumento99 páginas01 Electrical Basicskola naresh kumarAinda não há avaliações
- AC Motor Repair Hyster US-ENDocumento74 páginasAC Motor Repair Hyster US-ENFrancisco Júnior100% (1)
- Bently Nevada PDFDocumento98 páginasBently Nevada PDFtina do truongAinda não há avaliações