Você também pode gostar
- Recibo de Luz 2024Documento1 páginaRecibo de Luz 2024brunodavila08Ainda não há avaliações
- Pe Lindley 201912 Fin BCDocumento11 páginasPe Lindley 201912 Fin BCCAROL SALCEDO ORMEÑOAinda não há avaliações
- Identificar Las Bobinas de Un MotorDocumento1 páginaIdentificar Las Bobinas de Un MotorFabian Bravo67% (3)
- Guia para Sulfato FerrosoDocumento15 páginasGuia para Sulfato FerrosoLuna Mendoza AguilarAinda não há avaliações
- Capacitores PDFDocumento2 páginasCapacitores PDFIng Anderson Saint FortAinda não há avaliações
- MaquinasyE - INV. COMBUSTIBLEDocumento25 páginasMaquinasyE - INV. COMBUSTIBLEMissael Olmos ContrerasAinda não há avaliações
- Aldeán Aguirre Wilman Tesis PDFDocumento165 páginasAldeán Aguirre Wilman Tesis PDFJuan VasquezAinda não há avaliações
- Representaciones Sociales Acerca Del Impacto Medioambiental de LasDocumento14 páginasRepresentaciones Sociales Acerca Del Impacto Medioambiental de LasFranco Carreño GuajardoAinda não há avaliações
- Coil Expert CHDocumento2 páginasCoil Expert CHmelator0% (1)
- Trinca - Fundamentos y Aplicaciones de Propulsores Navales 6 A.it - EsDocumento16 páginasTrinca - Fundamentos y Aplicaciones de Propulsores Navales 6 A.it - Esjuan silvaAinda não há avaliações
- Diseño de Sistema de Aire AcondicionadoDocumento61 páginasDiseño de Sistema de Aire AcondicionadoJosé Francisco Lara AguilarAinda não há avaliações
- Universidad Nacional San Antonio Abad Del CuscoDocumento6 páginasUniversidad Nacional San Antonio Abad Del CuscoFredy Guzmán YapuraAinda não há avaliações
- Honeywell Home T3 y T3RDocumento10 páginasHoneywell Home T3 y T3RMaria StingaAinda não há avaliações
- Catalogo Tarifa Puska 2010Documento48 páginasCatalogo Tarifa Puska 2010Anonymous s8uUw1Ainda não há avaliações
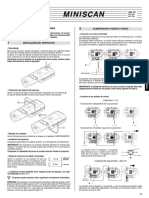
- Clay Paky Miniscan (HMD 300)Documento5 páginasClay Paky Miniscan (HMD 300)QubAinda não há avaliações
- Informe Fisicoquimica de Alimentos. MicroondasDocumento16 páginasInforme Fisicoquimica de Alimentos. MicroondasMario Perez Rivera50% (2)
- S13 Sistema de Frenado Del VehículoDocumento35 páginasS13 Sistema de Frenado Del Vehículoc07170100% (1)
- Oil and Gas Innovation ForumDocumento59 páginasOil and Gas Innovation ForumNinfa SuarezAinda não há avaliações
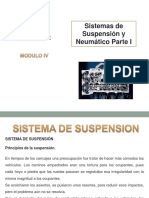
- M4 Sistema de Suspensión y Neumático P1Documento14 páginasM4 Sistema de Suspensión y Neumático P1Franklin BravoAinda não há avaliações
- Pro 22 009 Transmateriales 08 Du GeneralDocumento1 páginaPro 22 009 Transmateriales 08 Du GeneralCarlos Andres De La Hoz GarciaAinda não há avaliações
- INTENSIVO 2016 Física Segundo Examen Versión 1 PDFDocumento7 páginasINTENSIVO 2016 Física Segundo Examen Versión 1 PDFJorge PibaqueAinda não há avaliações
- Tabla de Codigo A Destellos ABS Meritor WABCODocumento4 páginasTabla de Codigo A Destellos ABS Meritor WABCOjose luis100% (1)
- Comisión Nacional de Seguridad Nuclear y SalvaguardiasDocumento4 páginasComisión Nacional de Seguridad Nuclear y SalvaguardiasMisael Galicia FloresAinda não há avaliações
- EDESUR SA C Municipalidad de Berazategui S Sumarísimo - Cámara Federal de Apelaciones de La PlataDocumento9 páginasEDESUR SA C Municipalidad de Berazategui S Sumarísimo - Cámara Federal de Apelaciones de La PlataRuben AjhuachoAinda não há avaliações
- Informe Tecnico de Recarga de ExtintoresDocumento6 páginasInforme Tecnico de Recarga de Extintoresfrank75% (4)
- Examen de MantenimientoDocumento14 páginasExamen de MantenimientoIgor Yordy OrtizAinda não há avaliações
- Sensores de Oxigeno en El Campo AutomotrizDocumento18 páginasSensores de Oxigeno en El Campo AutomotrizHARAIEL DANIELA TORRES TAIPEAinda não há avaliações
- Sistema Básico de Dinámica (ME 9429ADocumento52 páginasSistema Básico de Dinámica (ME 9429AErick Lazo ValdiviaAinda não há avaliações
- Prueba de Diagnostico HISTORIA Septimo BasicoDocumento4 páginasPrueba de Diagnostico HISTORIA Septimo Basicojonathan islaAinda não há avaliações
- ACHS Descripcion CalderasDocumento26 páginasACHS Descripcion Calderaspam_8067% (3)