Você também pode gostar
- Capitulo 1 - Función de TransferenciaDocumento23 páginasCapitulo 1 - Función de TransferenciaCamilo ArceAinda não há avaliações
- Seguridad Firewalls Final UTNDocumento13 páginasSeguridad Firewalls Final UTNJennifer SantillanAinda não há avaliações
- Lab4 Filtros Matlab PDFDocumento49 páginasLab4 Filtros Matlab PDFMarielAinda não há avaliações
- Informe 1 - Muestreadores y RetenedoresDocumento15 páginasInforme 1 - Muestreadores y RetenedoresAmael Chacon RodriguezAinda não há avaliações
- Laboratorio3 Control DigitalDocumento16 páginasLaboratorio3 Control DigitalCésar Augusto Q. LaverianoAinda não há avaliações
- Canal AWGNDocumento3 páginasCanal AWGNJkyuu Chen100% (1)
- Guia 1 CTOS Analogos Grupo CDocumento5 páginasGuia 1 CTOS Analogos Grupo CJose ValeroAinda não há avaliações
- Nicanor Raul Benites Saravia - FieeDocumento5 páginasNicanor Raul Benites Saravia - FieeWalther CJAinda não há avaliações
- Laboratorio n4 de Sumador Multiplexor y DemultiplexorDocumento11 páginasLaboratorio n4 de Sumador Multiplexor y DemultiplexorSantos Zosimo Ocas GoicocheaAinda não há avaliações
- Taller FiltrosDocumento8 páginasTaller FiltrosMauricio PerdomoAinda não há avaliações
- Graficos de Bode Con PSpiceDocumento11 páginasGraficos de Bode Con PSpicejuan ramirezAinda não há avaliações
- Practica 2 Electronica IDocumento5 páginasPractica 2 Electronica IAngel David GutnamiasAinda não há avaliações
- Señalizacion MultinivelDocumento6 páginasSeñalizacion MultinivelMiguel ClarosAinda não há avaliações
- Laboratorio 4 de Sistemas de Comunicación Digital IDocumento8 páginasLaboratorio 4 de Sistemas de Comunicación Digital IAndrésEduardoMartinezAinda não há avaliações
- Tarea VHDLDocumento13 páginasTarea VHDLJulio Cesar Romero100% (1)
- Informefinal 5 Sistemas Digitales Ee635Documento15 páginasInformefinal 5 Sistemas Digitales Ee635juan ramos ruizAinda não há avaliações
- Ejercicios Transformada ZDocumento1 páginaEjercicios Transformada ZRobertoPáezSalgadoAinda não há avaliações
- Prac 2 CD 2019Documento3 páginasPrac 2 CD 2019CesarLavadoAinda não há avaliações
- Analisis de Señales Trabajo Escrito 1Documento8 páginasAnalisis de Señales Trabajo Escrito 1JOSE ANTONIOAinda não há avaliações
- Teoría de Las Líneas de Dos ConductoresDocumento18 páginasTeoría de Las Líneas de Dos ConductoresJoel PcAinda não há avaliações
- Informe Final 1Documento5 páginasInforme Final 1samuel guardiaAinda não há avaliações
- Es It255 20202 SolucionarioDocumento9 páginasEs It255 20202 SolucionarioJohanna Veronica Alva ChaucaAinda não há avaliações
- Iem-453 y PracticaDocumento50 páginasIem-453 y PracticawanderssonAinda não há avaliações
- Ejercicios Mod A&d - Resultados (Fam) - Rev3Documento14 páginasEjercicios Mod A&d - Resultados (Fam) - Rev3fapablazaMAinda não há avaliações
- Taller1 de Sistemas de Control DigitalDocumento3 páginasTaller1 de Sistemas de Control DigitalLU PAAinda não há avaliações
- Informe Final 4 PDS FIEE UNMSMDocumento13 páginasInforme Final 4 PDS FIEE UNMSMmrtAinda não há avaliações
- PRACTICA 1 LaboratorioDigitalDocumento23 páginasPRACTICA 1 LaboratorioDigitalRonald Molina FariasAinda não há avaliações
- Ejercicios en MATLABDocumento11 páginasEjercicios en MATLABJuan Felipe FigueroaAinda não há avaliações
- Informe Previo 4 MalcaDocumento5 páginasInforme Previo 4 MalcaLuisfelipe Zavaleta GuevaraAinda não há avaliações
- Informe Previo 5 Analisis TemporalDocumento9 páginasInforme Previo 5 Analisis TemporalLuisCabreraOroscoAinda não há avaliações
- Cap 03 Modulacion AM2Documento21 páginasCap 03 Modulacion AM2albertwillyAinda não há avaliações
- ANTENAS INTELIGENTES-8a - (SEC) PDFDocumento67 páginasANTENAS INTELIGENTES-8a - (SEC) PDFKarito GarciaAinda não há avaliações
- Antenas Horn BocinaDocumento28 páginasAntenas Horn BocinaXavier HernánAinda não há avaliações
- El AnenometroDocumento3 páginasEl AnenometroMijail TellezAinda não há avaliações
- Practica Sobre El Analizador de EspectrosDocumento2 páginasPractica Sobre El Analizador de EspectrosDiego RodriguezAinda não há avaliações
- Atenuador 5dbiDocumento9 páginasAtenuador 5dbiHéctor RosalesAinda não há avaliações
- Registros de DesplazamientoDocumento17 páginasRegistros de DesplazamientoJULIÁN SAÚL DÁVILA REQUE100% (1)
- Slides Practica InformacionDocumento40 páginasSlides Practica InformacionxtekacAinda não há avaliações
- Informe Final 4 MalcaDocumento8 páginasInforme Final 4 MalcaJohn CastroAinda não há avaliações
- Laboratorio de Telecomunicaciones IIIDocumento10 páginasLaboratorio de Telecomunicaciones IIIsergio damianAinda não há avaliações
- Bitácora RF Grupo 3Documento22 páginasBitácora RF Grupo 3FabianRicardoSierraGonzalezAinda não há avaliações
- Transformada de HilbertDocumento14 páginasTransformada de HilbertZagan EngelSein Sanscœur NetzerAinda não há avaliações
- Avance InformeDocumento31 páginasAvance InformeLiam Siles NuñezAinda não há avaliações
- CONCLUSIONESDocumento1 páginaCONCLUSIONESJorge Saravia VasconezAinda não há avaliações
- EnsayoDocumento10 páginasEnsayoWendy PintoAinda não há avaliações
- Parametros de Antenas y Formula de FriisDocumento8 páginasParametros de Antenas y Formula de FriisLizbeth Estefania Villarroel MoralesAinda não há avaliações
- Ejercicios ConvolucionDocumento4 páginasEjercicios Convolucionogidoc0% (1)
- Practica #3Documento14 páginasPractica #3Jordan Moreira ValdezAinda não há avaliações
- Resumen de Significado y Uso de ADC y DACDocumento6 páginasResumen de Significado y Uso de ADC y DACRene CastilloAinda não há avaliações
- Informeproyecto Paredes Eletronicos1Documento10 páginasInformeproyecto Paredes Eletronicos1gustavo RiveraAinda não há avaliações
- MODO INGENIERO FinalDocumento22 páginasMODO INGENIERO FinalBri SoniaAinda não há avaliações
- Problemas SimuladosDocumento6 páginasProblemas SimuladosRaúl Dylan CapchaAinda não há avaliações
- Introducción A Los Sistemas de Control DiscretosDocumento7 páginasIntroducción A Los Sistemas de Control DiscretosNiklaus Palerme100% (1)
- 1 +introducciónDocumento14 páginas1 +introducciónEsbany Lanchipa SanchezAinda não há avaliações
- 1-Presentación IntroducciónDocumento47 páginas1-Presentación IntroducciónMARIANOAinda não há avaliações
- Introducción A Los Sistemas Discretos 2013-2Documento12 páginasIntroducción A Los Sistemas Discretos 2013-2diosmarsempunAinda não há avaliações
- 3.4 Introduccion A Control Digital 2Documento80 páginas3.4 Introduccion A Control Digital 2Edson C HuanquisAinda não há avaliações
- 3.4 Introduccion A Control Digital PDFDocumento80 páginas3.4 Introduccion A Control Digital PDFJohann Smith Aranda RamosAinda não há avaliações
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoNo EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoAinda não há avaliações
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311No EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Nota: 4.5 de 5 estrelas4.5/5 (2)
- Resumen Video Una Verdad Incómoda El Gran Fraude Del Calentamiento GlobalDocumento2 páginasResumen Video Una Verdad Incómoda El Gran Fraude Del Calentamiento GlobalJosé Carlos Turpo QuiroAinda não há avaliações
- La Accion Del SolenoideDocumento8 páginasLa Accion Del SolenoideJosé Carlos Turpo QuiroAinda não há avaliações
- Desviación de Los Ciclos de Potencia de Vapores Reales Respecto de Los Idealizados ExpocicionDocumento4 páginasDesviación de Los Ciclos de Potencia de Vapores Reales Respecto de Los Idealizados ExpocicionJosé Carlos Turpo QuiroAinda não há avaliações
- La Accion Del SolenoideDocumento8 páginasLa Accion Del SolenoideJosé Carlos Turpo QuiroAinda não há avaliações
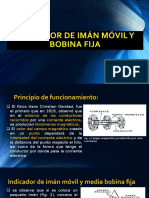
- Indicador de Imán Móvil y Bobina Fija ExpocicionDocumento8 páginasIndicador de Imán Móvil y Bobina Fija ExpocicionJosé Carlos Turpo QuiroAinda não há avaliações
- Dinamica de GasesDocumento35 páginasDinamica de GasesJosé Carlos Turpo QuiroAinda não há avaliações
- Metodo de La SecanteDocumento8 páginasMetodo de La SecanteJosé Carlos Turpo QuiroAinda não há avaliações
- Proceso de Adquisición de Materiales 8 02 2023Documento1 páginaProceso de Adquisición de Materiales 8 02 2023gerson chavarroAinda não há avaliações
- Gonzalez Juan MicroDocumento3 páginasGonzalez Juan MicroJuan GlezAinda não há avaliações
- Masa MolecularDocumento3 páginasMasa MolecularAli AlexandraAinda não há avaliações
- Anatomia Catedra ADocumento10 páginasAnatomia Catedra AjorgeAinda não há avaliações
- EDigital - Actividad - Semana 01 - Grupo4Documento7 páginasEDigital - Actividad - Semana 01 - Grupo4Daniela Trujillo BazalarAinda não há avaliações
- Guion - El Objeto de Estudio Del Materialismo Histórico IIDocumento9 páginasGuion - El Objeto de Estudio Del Materialismo Histórico IISebastían BelmonthAinda não há avaliações
- Decolonizar La HistoriaDocumento4 páginasDecolonizar La HistoriaDarío Javier Dal LagoAinda não há avaliações
- ImpactDocumento2 páginasImpactHenry Castillo HidalgoAinda não há avaliações
- Estudio Sismo-Resistente en Piscinas Prefabricadas de Ferrocemento. Cálculo de MaterialesDocumento14 páginasEstudio Sismo-Resistente en Piscinas Prefabricadas de Ferrocemento. Cálculo de MaterialesyilmerthomasAinda não há avaliações
- ABD - Practica 13-3Documento6 páginasABD - Practica 13-3ANIBAL GONZALEZ TOVARAinda não há avaliações
- (PDF) Bobbio Norberto Estado Gobierno Y Sociedad - Arcadio Antonio Lima Machado - Academia - EduDocumento127 páginas(PDF) Bobbio Norberto Estado Gobierno Y Sociedad - Arcadio Antonio Lima Machado - Academia - EdurubenAinda não há avaliações
- Criminologia y CriminalisticaDocumento47 páginasCriminologia y CriminalisticaGabriela Gonzalez HernandezAinda não há avaliações
- Examen ParcialDocumento4 páginasExamen ParcialSilvi SimonettiAinda não há avaliações
- Puente de ScheringDocumento12 páginasPuente de ScheringCarlos GalindoAinda não há avaliações
- Biologia y Geologia 1BTODocumento34 páginasBiologia y Geologia 1BTOPaauuliitaaAinda não há avaliações
- 5.1 Introduccion Del Tema Liderazgo y Manejo de EquipoDocumento5 páginas5.1 Introduccion Del Tema Liderazgo y Manejo de EquipoGilberto CastellanosAinda não há avaliações
- Informacion Plan de Mantenimiento PDFDocumento1 páginaInformacion Plan de Mantenimiento PDFJames SmithAinda não há avaliações
- Separata Numero 01 Enero - Marzo 2022 - IDocumento27 páginasSeparata Numero 01 Enero - Marzo 2022 - IAdamaris raciel roque palaciosAinda não há avaliações
- Distribución NormalDocumento48 páginasDistribución NormalMargarita BarrazaAinda não há avaliações
- SPT 01Documento3 páginasSPT 01OMAR GARCIAAinda não há avaliações
- Feedwater SystemDocumento30 páginasFeedwater SystemIvan Poma MontesAinda não há avaliações
- Hambre Traduccion de Kirsti Baggethun - Knut HamsunDocumento134 páginasHambre Traduccion de Kirsti Baggethun - Knut HamsunMauro Rojas33% (3)
- MAPA2Documento1 páginaMAPA2gaboAinda não há avaliações
- Educacion Fisica 1Documento9 páginasEducacion Fisica 1SAIRIS MILENA FIGUEROA CASTILLEJOAinda não há avaliações
- Sned Periodo 2022-2023Documento14 páginasSned Periodo 2022-2023Victor FigueroaAinda não há avaliações
- Practica II Circuito San Antonio de Los CobresDocumento6 páginasPractica II Circuito San Antonio de Los CobrescrberriAinda não há avaliações
- 2024GameManual EspañolDocumento149 páginas2024GameManual EspañoldaNyAinda não há avaliações
- 2 RotulaciónDocumento8 páginas2 RotulaciónAlejoAinda não há avaliações
- Circuladores para Enlaces MicroondasDocumento3 páginasCirculadores para Enlaces MicroondasEdwars Andoni Gabriel HuertaAinda não há avaliações
- Entre Conciertos y Des-Conciertos El Juego Como Acto PolíticoDocumento21 páginasEntre Conciertos y Des-Conciertos El Juego Como Acto PolíticoLucía Fernández CívicoAinda não há avaliações