Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- PERCDCDocumento10 páginasPERCDCSheehan Kayne De CardoAinda não há avaliações
- Geas 1Documento84 páginasGeas 1Mariz-Elaine Noceja Rodriguez100% (7)
- MCQ in Communications Engineering by Lomboy & VillanuevaDocumento114 páginasMCQ in Communications Engineering by Lomboy & VillanuevaSheehan Kayne De CardoAinda não há avaliações
- Cellular TelephonyDocumento88 páginasCellular TelephonySheehan Kayne De CardoAinda não há avaliações
- REVIEWER in Electronic Communications System by Wayne TomasiDocumento112 páginasREVIEWER in Electronic Communications System by Wayne TomasiSheehan Kayne De CardoAinda não há avaliações
- Group Study - Wave Propagation - QuestionnaireDocumento8 páginasGroup Study - Wave Propagation - QuestionnaireSheehan Kayne De CardoAinda não há avaliações
- Group Study - Wave Propagation - QuestionnaireDocumento8 páginasGroup Study - Wave Propagation - QuestionnaireSheehan Kayne De CardoAinda não há avaliações
- Group Study - Transmission Lines Answer KeyDocumento6 páginasGroup Study - Transmission Lines Answer KeySheehan Kayne De Cardo100% (1)
- A. A. B. A. A. A.: Group Study - Op Amps and Ic'S Digital Electronics Answer KeyDocumento6 páginasA. A. B. A. A. A.: Group Study - Op Amps and Ic'S Digital Electronics Answer KeyLorenz ArdienteAinda não há avaliações
- Group Study - Vac Tubes and Semicon Theory Diodes and ApplicationsDocumento7 páginasGroup Study - Vac Tubes and Semicon Theory Diodes and ApplicationsSheehan Kayne De CardoAinda não há avaliações
- Group Study - Microwaves Answer KeyDocumento10 páginasGroup Study - Microwaves Answer KeySheehan Kayne De CardoAinda não há avaliações
- Group Study - Satcom Answer KeyDocumento9 páginasGroup Study - Satcom Answer KeySheehan Kayne De CardoAinda não há avaliações
- Group Study - Transistors and Amplifiers Answer KeyDocumento7 páginasGroup Study - Transistors and Amplifiers Answer KeySheehan Kayne De CardoAinda não há avaliações
- Group Study - Instrumentation QuestionnaireDocumento7 páginasGroup Study - Instrumentation QuestionnaireSheehan Kayne De CardoAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Continua SQ Wall LEDDocumento7 páginasContinua SQ Wall LEDneuvoAinda não há avaliações
- Ipm650 PDFDocumento5 páginasIpm650 PDFJAHDLAinda não há avaliações
- NAP Form 10 PDFDocumento2 páginasNAP Form 10 PDFjoseph judahAinda não há avaliações
- XW PRO UL9540 Energy Storage Systems InformationDocumento7 páginasXW PRO UL9540 Energy Storage Systems InformationMujeeb Ur Rehman KhalilAinda não há avaliações
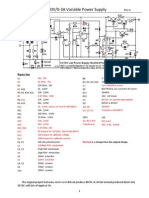
- Modified 0-30V - 0-3A Variable Power Supply - Rev.2Documento2 páginasModified 0-30V - 0-3A Variable Power Supply - Rev.2Manuel Cereijo NeiraAinda não há avaliações
- Sag Tension (ACCC Casablanca)Documento2 páginasSag Tension (ACCC Casablanca)Subodh SontakkeAinda não há avaliações
- IPL RevalidaDocumento55 páginasIPL RevalidaAto TejaAinda não há avaliações
- Electric Field and Ultrasonic Sensor Based Security System PDFDocumento4 páginasElectric Field and Ultrasonic Sensor Based Security System PDFHabib Ariffin IsaAinda não há avaliações
- Hyperion EssbaseDocumento16 páginasHyperion Essbaseguru_rcpAinda não há avaliações
- Keithley 182 Quick GuideDocumento38 páginasKeithley 182 Quick GuideChih-Wei ChangAinda não há avaliações
- Introduction To Vlsi Circuits and Systems John P UyemuraDocumento1 páginaIntroduction To Vlsi Circuits and Systems John P UyemuramgowtaamAinda não há avaliações
- Corporate Entrepreneurship - HowDocumento30 páginasCorporate Entrepreneurship - HowHoang Anh TuanAinda não há avaliações
- NCPDP Pharmacy Drug ClaimsDocumento8 páginasNCPDP Pharmacy Drug ClaimskallepalliAinda não há avaliações
- Audit Program TempleteDocumento3 páginasAudit Program TempleteKudakwashe ChiwunyaAinda não há avaliações
- Customer Satisfaction in Online ShoppingDocumento71 páginasCustomer Satisfaction in Online ShoppingKediriwang DomttaAinda não há avaliações
- Ci QBDocumento13 páginasCi QBGanesh KumarAinda não há avaliações
- Dav DZ340 PDFDocumento92 páginasDav DZ340 PDFCurtoAVidaAinda não há avaliações
- Mechatronics Course OutlineDocumento3 páginasMechatronics Course OutlineRoss Mel Bautista LingonAinda não há avaliações
- Chapter 4Documento67 páginasChapter 4longtran1191Ainda não há avaliações
- Power Plant Manual 1Documento8 páginasPower Plant Manual 1Khoirul WaladAinda não há avaliações
- Overproduction MUDADocumento1 páginaOverproduction MUDARaza HasanAinda não há avaliações
- WWW - Ykkap Agen - Com NEXSTA CatalogDocumento33 páginasWWW - Ykkap Agen - Com NEXSTA CatalogXaverius NandaAinda não há avaliações
- Research Paper On Support Vector MachineDocumento6 páginasResearch Paper On Support Vector Machinepoypdibkf100% (1)
- In The Design of A Relational Database Management SystemDocumento5 páginasIn The Design of A Relational Database Management SystemKumbham AbhijitAinda não há avaliações
- Department of Education: Project All Numerates Grade 6 Table of SpecificationsDocumento3 páginasDepartment of Education: Project All Numerates Grade 6 Table of Specificationsian bondocAinda não há avaliações
- Manual Survey Pro For RangerDocumento337 páginasManual Survey Pro For RangerIni ChitozAinda não há avaliações
- CUSTOM - PLL in FormsDocumento10 páginasCUSTOM - PLL in FormsBhargi111Ainda não há avaliações
- Lessons Learned ChecklistDocumento7 páginasLessons Learned ChecklistAnonymous puqCYDnQAinda não há avaliações
- E Ms-50g Fx-List v2.0Documento9 páginasE Ms-50g Fx-List v2.0MiniEscortAinda não há avaliações
- Best Lesson PlanDocumento4 páginasBest Lesson Planapi-398545121Ainda não há avaliações