Você também pode gostar
- Tesina - Pan de ChocloDocumento26 páginasTesina - Pan de ChocloDavid EnriquezAinda não há avaliações
- Pregunta 9Documento7 páginasPregunta 9Juan Antonio LopezAinda não há avaliações
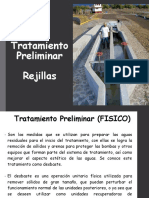
- Clase 3a, Tratamiento Preliminar RejillasDocumento35 páginasClase 3a, Tratamiento Preliminar RejillasJairo Silva CoreaAinda não há avaliações
- Defectos de Escaldado de EmbutidosDocumento7 páginasDefectos de Escaldado de EmbutidosLAIME MATAMORO CIRILOAinda não há avaliações
- Maquinarias para Limpieza y SeleccionDocumento38 páginasMaquinarias para Limpieza y SeleccionLuz Martinez MartinezAinda não há avaliações
- Informe HornoDocumento19 páginasInforme HornoAndreina PerniaAinda não há avaliações
- Tesis Pasta Cebolla de Rama SalleDocumento251 páginasTesis Pasta Cebolla de Rama SallethepowerposAinda não há avaliações
- Compresión de Envases PlásticosDocumento2 páginasCompresión de Envases PlásticosJuan QCAinda não há avaliações
- Tec. de Frutas y Hortalisas - Macerado de Uva y TamarindoDocumento14 páginasTec. de Frutas y Hortalisas - Macerado de Uva y TamarindoSamuel J. González Aguirre100% (1)
- Proceso de La Elaboración de La Conserva Del Machete de Pescado en Salsa de TomateDocumento5 páginasProceso de La Elaboración de La Conserva Del Machete de Pescado en Salsa de TomateKriss Galvez Rodriguez0% (1)
- Microencapsulacion Mediante Secado Por Atomizacion de Tumbo PDFDocumento125 páginasMicroencapsulacion Mediante Secado Por Atomizacion de Tumbo PDFCarmenAinda não há avaliações
- Proceso de Obtencion Del Acido Polilactico A Partir Del Almidon de Papa PufffDocumento24 páginasProceso de Obtencion Del Acido Polilactico A Partir Del Almidon de Papa PufffLissette Jeri Amao100% (2)
- Comercializacion de TripaDocumento33 páginasComercializacion de TripaVicky Salazar100% (1)
- Practica N 04 PDFDocumento5 páginasPractica N 04 PDFChris GuzmanAinda não há avaliações
- Informe 1 de Reconocimiento de Materiales en Acero InoxDocumento8 páginasInforme 1 de Reconocimiento de Materiales en Acero InoxDennis Ricopa Vasquez50% (2)
- Marco TeoricoDocumento109 páginasMarco TeoricoSergio TeránAinda não há avaliações
- Diario Oficial de Colombia N° 49.897. 07 de Junio de 2016Documento48 páginasDiario Oficial de Colombia N° 49.897. 07 de Junio de 2016www.oficial.coAinda não há avaliações
- Diseno y Calculo de Un Filtro de Magas y Su Transportador HelicoidalDocumento63 páginasDiseno y Calculo de Un Filtro de Magas y Su Transportador HelicoidaleduardoguidoAinda não há avaliações
- Introducción Papel y Pasta Mecanica 2018Documento71 páginasIntroducción Papel y Pasta Mecanica 2018INGRID VIVAS BARAHONAAinda não há avaliações
- Materiiales Permeables en La Agroindustria - Empacado AgroindustrialDocumento12 páginasMateriiales Permeables en La Agroindustria - Empacado AgroindustrialAntony VieraAinda não há avaliações
- Maquina Peladora Papas PDFDocumento1 páginaMaquina Peladora Papas PDFJ. RuizAinda não há avaliações
- Analisis de Datos Planta PilotoDocumento70 páginasAnalisis de Datos Planta PilotoFrancisco ColoradoAinda não há avaliações
- Elaboración de Biopolímeros A Partir de Almidón de Papa, Camote y Maíz para Determinar Sus Propiedades FísicasDocumento5 páginasElaboración de Biopolímeros A Partir de Almidón de Papa, Camote y Maíz para Determinar Sus Propiedades FísicasFernando Garcia TupesAinda não há avaliações
- Tamizadores de Barras o Parrillas GiratoriasDocumento13 páginasTamizadores de Barras o Parrillas GiratoriasAlexandra Camacho TorricoAinda não há avaliações
- Registros de Evaluacion de CierresDocumento10 páginasRegistros de Evaluacion de CierreshelbertortizAinda não há avaliações
- Caracterización Física de Extruidos Preparados Con Mezclas de Sémola de Maíz y Harina de YucaDocumento57 páginasCaracterización Física de Extruidos Preparados Con Mezclas de Sémola de Maíz y Harina de YucaStephania Solarte OrtegaAinda não há avaliações
- NTC1262Documento5 páginasNTC1262ngalviseAinda não há avaliações
- Maquina RebanadoraDocumento23 páginasMaquina RebanadoraJose Ignacio NinaAinda não há avaliações
- Lab.3-4 Analisis ProximalDocumento7 páginasLab.3-4 Analisis ProximalJuanDavidOrtegaOlaveAinda não há avaliações
- Frutillas Supermaxi. AgrocomercioDocumento13 páginasFrutillas Supermaxi. AgrocomercioStalin ZynAinda não há avaliações
- Lab Filtracion AlejaDocumento9 páginasLab Filtracion AlejaAlber RuizAinda não há avaliações
- Monografia - PrincipiosDocumento48 páginasMonografia - PrincipiosKeny Hans RamosAinda não há avaliações
- Flujo de Fluidos en Camas Granulares - Ipa IiDocumento13 páginasFlujo de Fluidos en Camas Granulares - Ipa IiShirley Esperanza Dueñas LabánAinda não há avaliações
- PRACTICA No 1 Medida Empírica de La Plasticidad de Materiales CerámicosDocumento4 páginasPRACTICA No 1 Medida Empírica de La Plasticidad de Materiales CerámicosMARIA ISABEL ROMERO ESCOBARAinda não há avaliações
- Chusmita Practica 4Documento8 páginasChusmita Practica 4Anonymous 7NfXJMQCMgAinda não há avaliações
- Laboratorio de Características Fisicas ArvejaDocumento4 páginasLaboratorio de Características Fisicas ArvejaKat Yin100% (1)
- Guía de Laboratorio #8-Conductividad Eléctrica y SalinidadDocumento3 páginasGuía de Laboratorio #8-Conductividad Eléctrica y SalinidadBranco HDAinda não há avaliações
- Cap. 12. Costos de Procesamiento de La Papa Diploide (Solanum Phureja Juz. Et Buk) y El Potencial de Sus Productos en Mercados InternacionalesDocumento13 páginasCap. 12. Costos de Procesamiento de La Papa Diploide (Solanum Phureja Juz. Et Buk) y El Potencial de Sus Productos en Mercados InternacionalesMagdalenaAinda não há avaliações
- Proyecto de Cedro CasiDocumento23 páginasProyecto de Cedro CasiCesar la TorreAinda não há avaliações
- Aquarium M&M 0703Documento39 páginasAquarium M&M 0703Kleberth Aldo CamposAinda não há avaliações
- Salyrosas JMDocumento212 páginasSalyrosas JMelizabethAinda não há avaliações
- Lechos PorososDocumento14 páginasLechos PorososMilagros Alexandra Cholan RodriguezAinda não há avaliações
- Taller de Fermentacion AlcoholicaDocumento5 páginasTaller de Fermentacion AlcoholicaJOHAN CAMACHOAinda não há avaliações
- PROYECTO Empacadora de ManzanaDocumento28 páginasPROYECTO Empacadora de ManzanaYovani Juarez LunaAinda não há avaliações
- 30SSH072 120 1ipDocumento15 páginas30SSH072 120 1ipMariano PeressuttiAinda não há avaliações
- NTC2391Documento0 páginaNTC2391Luis Alberto Curtidor GuataquiAinda não há avaliações
- Normas CapreDocumento27 páginasNormas Caprepichifox06100% (2)
- 02 Estudio MKD AmarantoDocumento69 páginas02 Estudio MKD AmarantoMarcelo CortezAinda não há avaliações
- Ralladora de Cocos-Elementos PDFDocumento42 páginasRalladora de Cocos-Elementos PDFAderli TorricoAinda não há avaliações
- Trabajo Final Pan de MoldeDocumento10 páginasTrabajo Final Pan de MoldeJonathanMeza0% (1)
- Diapositiva de V GamaDocumento12 páginasDiapositiva de V GamaalbertoAinda não há avaliações
- Mezcladoras Amasadoras Doble SigmaDocumento7 páginasMezcladoras Amasadoras Doble SigmaDiana CastellanosAinda não há avaliações
- RodamientosDocumento5 páginasRodamientosAlejandro Jesus Escobar JihuañaAinda não há avaliações
- Envasado Al VacioDocumento55 páginasEnvasado Al VacioJorge David Romero ChamacaAinda não há avaliações
- Cartilla de Ananlisis SensorialDocumento1 páginaCartilla de Ananlisis SensorialJota Garcia ParedesAinda não há avaliações
- Superdesintegrantes PDFDocumento14 páginasSuperdesintegrantes PDFwisievekAinda não há avaliações
- IKTAN Ficha TécnicaDocumento11 páginasIKTAN Ficha TécnicaernestomezagAinda não há avaliações
- Metrado Inst. ElectricasDocumento1 páginaMetrado Inst. ElectricasHaroldAinda não há avaliações
- Inventario LaboratoriosDocumento138 páginasInventario LaboratoriosNury AnccalliAinda não há avaliações
- Punto de FuerzaDocumento5 páginasPunto de Fuerzaerickcastillo1Ainda não há avaliações
- DipIngEstructurasMT v2Documento1 páginaDipIngEstructurasMT v2esbanAinda não há avaliações
- Guia Redes IndustrialesDocumento18 páginasGuia Redes IndustrialesesbanAinda não há avaliações
- Eb Digimec CatalogoDocumento7 páginasEb Digimec CatalogoesbanAinda não há avaliações
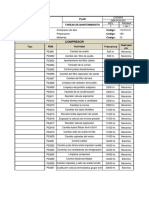
- Plan CompresorDocumento1 páginaPlan CompresoresbanAinda não há avaliações
- 2.0.mantenimiento Industrial PDFDocumento172 páginas2.0.mantenimiento Industrial PDFesbanAinda não há avaliações
- Diseño de Sistema Hidraulico de Un Elevador de AutosDocumento22 páginasDiseño de Sistema Hidraulico de Un Elevador de Autosesban100% (5)
- AMALIA QUEVEDO, El Concepto Aristotélico de Violencia PDFDocumento16 páginasAMALIA QUEVEDO, El Concepto Aristotélico de Violencia PDFMachucaAinda não há avaliações
- Soluqmc ADocumento6 páginasSoluqmc AMarco A. Anco LimachiAinda não há avaliações
- Practica 1 Arranque y Paro AquinoDocumento21 páginasPractica 1 Arranque y Paro AquinoMartin Ruiz SarmientoAinda não há avaliações
- Proyeccion Oferta y DemandaDocumento8 páginasProyeccion Oferta y DemandaBelénTorres100% (2)
- Tarea MetereologiaDocumento17 páginasTarea MetereologiaJhorel E. AncoAinda não há avaliações
- Guía para Trabajo Flexible GEOMETRIA 2020Documento2 páginasGuía para Trabajo Flexible GEOMETRIA 2020Leonardo CarilloAinda não há avaliações
- Normas para La Elaboracion de PlanosDocumento16 páginasNormas para La Elaboracion de PlanosDaniel Rojas Toscano100% (1)
- Base de Datos EstadisticaDocumento4 páginasBase de Datos EstadisticaCARMENZAAinda não há avaliações
- Estancia Armado ManualDocumento56 páginasEstancia Armado ManualcesamavAinda não há avaliações
- Msds Lps LST PenetrantDocumento6 páginasMsds Lps LST PenetrantEvelyn ClarosAinda não há avaliações
- Resumen de Lentes de Contacto BlandasDocumento3 páginasResumen de Lentes de Contacto BlandasMiguel GuzmanAinda não há avaliações
- Clase 4 Mediciones de NivelDocumento70 páginasClase 4 Mediciones de NivelAnthony Mills100% (2)
- Opt Oprs MNSDocumento72 páginasOpt Oprs MNSandgundAinda não há avaliações
- Trabajo de Investigación Generador SíncronoDocumento16 páginasTrabajo de Investigación Generador SíncronoYshtar Ramirez BurgueñoAinda não há avaliações
- Superconductores de Alta Temperatura PDFDocumento3 páginasSuperconductores de Alta Temperatura PDFCelia González SánchezAinda não há avaliações
- Metodos Iterativos de Reconstrucción de Imagenes TacDocumento14 páginasMetodos Iterativos de Reconstrucción de Imagenes TacJose Luis100% (1)
- El Agua en Canarias Historia Estrategias y Procedimientos Didacticos PDFDocumento60 páginasEl Agua en Canarias Historia Estrategias y Procedimientos Didacticos PDFFernando GonzálezAinda não há avaliações
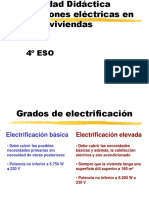
- Instalaciones Eléctricas en Viviendas PDFDocumento29 páginasInstalaciones Eléctricas en Viviendas PDFtxungoAinda não há avaliações
- Basurko Perforación y VoladuraDocumento13 páginasBasurko Perforación y VoladuraKei Melissa BasurkoAinda não há avaliações
- Multiplicacion Suma ReiteradaDocumento6 páginasMultiplicacion Suma ReiteradaCamila Valentina BelloAinda não há avaliações
- Espacios VectorialesDocumento61 páginasEspacios VectorialesJhonatan Steven MoraAinda não há avaliações
- Torre de EnfriamientoDocumento7 páginasTorre de EnfriamientofranzmsaAinda não há avaliações
- 2° Cuadernillo de Reforzamiento AlumnoDocumento63 páginas2° Cuadernillo de Reforzamiento Alumnoconchita marin ballinasAinda não há avaliações
- 1.2 MétodosDocumento6 páginas1.2 MétodosLorena Piedrahita EstradaAinda não há avaliações
- Estructura de Paredes 1Documento28 páginasEstructura de Paredes 1JUAN MANUEL ESPAÑA ESTRELLAAinda não há avaliações
- Avance InstrumentaciónDocumento23 páginasAvance Instrumentaciónarmando palacinAinda não há avaliações
- Los Números RealesDocumento7 páginasLos Números RealesHermaiony Cristina VasquezAinda não há avaliações
- 40 - Manual Usuario - Monitor Fetal Edan F9Documento72 páginas40 - Manual Usuario - Monitor Fetal Edan F9pirihuey1234Ainda não há avaliações
- Norma Tecnica 2017 ColegiosDocumento152 páginasNorma Tecnica 2017 ColegiosAngel MCAinda não há avaliações
- REVENIDODocumento13 páginasREVENIDOMaricielo SagumaAinda não há avaliações