Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Doublet Lattice MethodDocumento13 páginasDoublet Lattice MethodRocco Musci100% (1)
- Sequences & Series - Past Questions & Solutions: November 2008Documento103 páginasSequences & Series - Past Questions & Solutions: November 2008Santa KalAinda não há avaliações
- Quantum Analysis of Degenerate Three-Level LaserDocumento6 páginasQuantum Analysis of Degenerate Three-Level LaserSitotaw Eshete GebremeskelAinda não há avaliações
- Bollard Catalog - SPDocumento28 páginasBollard Catalog - SPrisiana_limuriaAinda não há avaliações
- Detailing To Eurocode 2Documento12 páginasDetailing To Eurocode 2Bhandari_007100% (1)
- Basis For Tubular Joint DesignDocumento11 páginasBasis For Tubular Joint Designwinlugue3059Ainda não há avaliações
- Barge Stability GuidelinesDocumento10 páginasBarge Stability Guidelinesnautilus73100% (2)
- mth101 Assignment SolutionDocumento3 páginasmth101 Assignment Solutioncs619finalproject.comAinda não há avaliações
- Mod8 Subsea Technology and Flow AssuranceDocumento35 páginasMod8 Subsea Technology and Flow Assurancerisiana_limuriaAinda não há avaliações
- Criteria For Guide and BumperDocumento24 páginasCriteria For Guide and Bumperrisiana_limuriaAinda não há avaliações
- X-Brace of Planar Steel Frame Using Ant SystemDocumento20 páginasX-Brace of Planar Steel Frame Using Ant Systemrisiana_limuriaAinda não há avaliações
- Bollard CatalogDocumento30 páginasBollard CatalogAnonymous YN4aNlAinda não há avaliações
- Department of Defence: Science and Technology Organisation Materials Research LaboratoryDocumento33 páginasDepartment of Defence: Science and Technology Organisation Materials Research Laboratoryrisiana_limuriaAinda não há avaliações
- Poutrelles-Pieux Américaines À Larges AilesDocumento2 páginasPoutrelles-Pieux Américaines À Larges Ailesrisiana_limuriaAinda não há avaliações
- Mechanics of Pile Cap and Pile GroupDocumento69 páginasMechanics of Pile Cap and Pile Grouppk100% (1)
- جداول قطاعات الحديدDocumento36 páginasجداول قطاعات الحديدEsam Mady100% (2)
- SMAW Electrode ClassificationDocumento2 páginasSMAW Electrode ClassificationHarold GillAinda não há avaliações
- Sheetplate SteeldataDocumento1 páginaSheetplate SteeldatahfenangadAinda não há avaliações
- Ejercicio de Soldadura AISC 2005Documento11 páginasEjercicio de Soldadura AISC 2005APBAinda não há avaliações
- Campbell Chain PDFDocumento46 páginasCampbell Chain PDFrisiana_limuriaAinda não há avaliações
- Welding PositionDocumento6 páginasWelding Positionenels77Ainda não há avaliações
- Walking Working Surfaces Handout PDFDocumento11 páginasWalking Working Surfaces Handout PDFrisiana_limuriaAinda não há avaliações
- Stairs Ladders Lesson PlanDocumento3 páginasStairs Ladders Lesson Planthongtn2007Ainda não há avaliações
- Walking Working Surfaces Handout PDFDocumento11 páginasWalking Working Surfaces Handout PDFrisiana_limuriaAinda não há avaliações
- CBR CorrelationsDocumento2 páginasCBR CorrelationsSuneel PalukuriAinda não há avaliações
- Avon Liferafts PDFDocumento8 páginasAvon Liferafts PDFrisiana_limuriaAinda não há avaliações
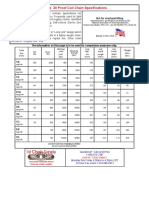
- Grade 30 Proof Coil ChainDocumento1 páginaGrade 30 Proof Coil Chainrisiana_limuriaAinda não há avaliações
- Katalog Wire Mesh SteelindonesiaDocumento2 páginasKatalog Wire Mesh Steelindonesiarisiana_limuriaAinda não há avaliações
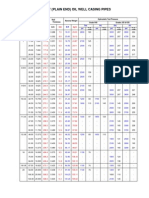
- Api 5 CTDocumento1 páginaApi 5 CTeudomartAinda não há avaliações
- Mechanics of Pile Cap and Pile GroupDocumento69 páginasMechanics of Pile Cap and Pile Grouppk100% (1)
- NS26 1footingsDocumento10 páginasNS26 1footingsKinzie McPhersonAinda não há avaliações
- Computer Application in ChEDocumento5 páginasComputer Application in ChEArrianne Jaye MataAinda não há avaliações
- Grade7 Q2 Week4Documento8 páginasGrade7 Q2 Week4Charlene Grace BronolaAinda não há avaliações
- Lkekdyu (Integration) : On Next PageDocumento9 páginasLkekdyu (Integration) : On Next PageReetu SinghAinda não há avaliações
- Mit Micro Economics LectureDocumento9 páginasMit Micro Economics LectureAnushka ShettyAinda não há avaliações
- Propeller Blade Shape Optimization For Efficiency ImprovementDocumento13 páginasPropeller Blade Shape Optimization For Efficiency ImprovementNurhayyan Halim RosidAinda não há avaliações
- Problem-Solving Approach to College AlgebraDocumento92 páginasProblem-Solving Approach to College AlgebraMar DocdorAinda não há avaliações
- 11 Mathematics Solved 04 New Sol KSVDocumento7 páginas11 Mathematics Solved 04 New Sol KSVHello It's MeAinda não há avaliações
- CBC Math PreCalculus Formula SheetDocumento7 páginasCBC Math PreCalculus Formula SheetJay MaguadAinda não há avaliações
- A Robust Estimator of The Efficient Frontier by Marcos López de Prado PDFDocumento16 páginasA Robust Estimator of The Efficient Frontier by Marcos López de Prado PDFSau L.Ainda não há avaliações
- Graphing Simple Rational Functions PDFDocumento4 páginasGraphing Simple Rational Functions PDFAlyssa Dee VillenaAinda não há avaliações
- Calculus of Variation 1Documento56 páginasCalculus of Variation 1Enny MurwaningtyasAinda não há avaliações
- Visualizing L Hopitals RuleDocumento7 páginasVisualizing L Hopitals RuleAlain-Philippe FortinAinda não há avaliações
- Past Integration Paper QuestionsDocumento23 páginasPast Integration Paper QuestionsAdeyemi DorcasAinda não há avaliações
- Newton's Divided Difference Polynomial Method Multiple Choice TestDocumento2 páginasNewton's Divided Difference Polynomial Method Multiple Choice TestJulio César Romero TorresAinda não há avaliações
- Numerical Methods in Civil Engg-Janusz ORKISZ PDFDocumento154 páginasNumerical Methods in Civil Engg-Janusz ORKISZ PDFRajesh CivilAinda não há avaliações
- Assignment III MATLAB CODEDocumento12 páginasAssignment III MATLAB CODEAlfredo IllescasAinda não há avaliações
- Statistics For Managers Using Microsoft Excel: 4 EditionDocumento82 páginasStatistics For Managers Using Microsoft Excel: 4 EditionHuseynov AliAinda não há avaliações
- Ma034 RPDocumento9 páginasMa034 RPkamal kannanAinda não há avaliações
- Chapter 1Documento62 páginasChapter 1AbdiAinda não há avaliações
- A Method For Solving Quadratic Programming Problems Having Linearly Factorized Objective FunctionDocumento5 páginasA Method For Solving Quadratic Programming Problems Having Linearly Factorized Objective FunctionIJMERAinda não há avaliações
- Myhill Nerode Theorem: by Anusha TilkamDocumento20 páginasMyhill Nerode Theorem: by Anusha TilkamRoodram PaneriAinda não há avaliações
- Bike Spreading Problem Approximation AlgorithmDocumento15 páginasBike Spreading Problem Approximation AlgorithmLearn With SidAinda não há avaliações
- Fowles 11Documento29 páginasFowles 11jjmaldonisAinda não há avaliações
- Linear Equations in 2 Variables Worksheet 3Documento1 páginaLinear Equations in 2 Variables Worksheet 3PRATHIKSHAAinda não há avaliações
- Table of Common Laplace TransformsDocumento2 páginasTable of Common Laplace TransformsJohn Carlo SacramentoAinda não há avaliações
- h03 Essential MathDocumento13 páginash03 Essential Mathakyadav123Ainda não há avaliações