Você também pode gostar
- Sc11 Cuda C BasicsDocumento68 páginasSc11 Cuda C BasicsPoncho CoetoAinda não há avaliações
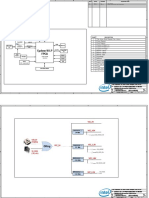
- c10lp Eval A1 SCHDocumento17 páginasc10lp Eval A1 SCHVienNgocQuangAinda não há avaliações
- To Opencv: Marvin SmithDocumento29 páginasTo Opencv: Marvin SmithVienNgocQuang100% (1)
- c10lp Eval A1 SCHDocumento17 páginasc10lp Eval A1 SCHVienNgocQuangAinda não há avaliações
- Workshop Manual (Eng-Rus)Documento40 páginasWorkshop Manual (Eng-Rus)VienNgocQuangAinda não há avaliações
- c10lp Eval A1 SCHDocumento56 páginasc10lp Eval A1 SCHVienNgocQuangAinda não há avaliações
- GTC Express Itseez Opencv Webinar PDFDocumento35 páginasGTC Express Itseez Opencv Webinar PDFazazel17Ainda não há avaliações
- Role Profile Teaching Assistant HCMCDocumento4 páginasRole Profile Teaching Assistant HCMCVienNgocQuangAinda não há avaliações
- ch2 PDFDocumento6 páginasch2 PDFVienNgocQuangAinda não há avaliações
- Lee-Enfield Rifle RF Short MksI and II (II)Documento4 páginasLee-Enfield Rifle RF Short MksI and II (II)VienNgocQuangAinda não há avaliações
- E911 Provisioning System Software Test Plan (STP)Documento11 páginasE911 Provisioning System Software Test Plan (STP)VienNgocQuangAinda não há avaliações
- The Silenced de Lisle Commando CarbineDocumento6 páginasThe Silenced de Lisle Commando CarbineVienNgocQuang100% (1)
- C For MathematiciansDocumento41 páginasC For MathematicianschinssuAinda não há avaliações
- T-34 in Angola 1970s 1980s - WwiiafterwwiiDocumento24 páginasT-34 in Angola 1970s 1980s - WwiiafterwwiiVienNgocQuang100% (1)
- DllmeDocumento1 páginaDllmeVienNgocQuangAinda não há avaliações
- Lee-Enfield Rifle 22RF Pattern 14Documento5 páginasLee-Enfield Rifle 22RF Pattern 14VienNgocQuangAinda não há avaliações
- Angle Iload Uload IsDocumento10 páginasAngle Iload Uload IsVienNgocQuangAinda não há avaliações
- MP 1Documento4 páginasMP 1VienNgocQuangAinda não há avaliações
- People Republic of KampucheaDocumento129 páginasPeople Republic of KampucheaVienNgocQuangAinda não há avaliações
- Industrial Sensors (Electromagnetic Flowmeter, Density (Consistency) Meter, Pressure Transmitter and Water Treatment Analyzer)Documento1 páginaIndustrial Sensors (Electromagnetic Flowmeter, Density (Consistency) Meter, Pressure Transmitter and Water Treatment Analyzer)VienNgocQuangAinda não há avaliações
- MP 2Documento3 páginasMP 2VienNgocQuangAinda não há avaliações
- JM 154Documento226 páginasJM 154VienNgocQuangAinda não há avaliações
- MP 3Documento3 páginasMP 3VienNgocQuangAinda não há avaliações
- Khmer Rouge Division 703Documento216 páginasKhmer Rouge Division 703VienNgocQuang100% (1)
- TOSHIBA Global Internship 2018 - Application Guidelines & Position ListDocumento17 páginasTOSHIBA Global Internship 2018 - Application Guidelines & Position ListVienNgocQuangAinda não há avaliações
- SummaryDocumento1 páginaSummaryVienNgocQuangAinda não há avaliações
- Cam Total WarDocumento142 páginasCam Total WarVienNgocQuangAinda não há avaliações
- Nikolaidis Pitas - Facial Feature Extraction and Pose DeterminationDocumento20 páginasNikolaidis Pitas - Facial Feature Extraction and Pose DeterminationVienNgocQuangAinda não há avaliações
- Summary and Future WorkDocumento2 páginasSummary and Future WorkVienNgocQuangAinda não há avaliações
- FN 98 Mauser Model 98 Rifle Operators ManualDocumento28 páginasFN 98 Mauser Model 98 Rifle Operators ManualAdam Ward100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
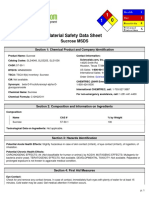
- Sukrosa PDFDocumento5 páginasSukrosa PDFSilvi TatianAinda não há avaliações
- DC Rectifier - OrionDocumento12 páginasDC Rectifier - OrionLimbagaAinda não há avaliações
- 320d WiringDocumento2 páginas320d WiringMohamed Harb100% (5)
- Chapter 4. FRC Manufacturing - Fundamental ConceptsDocumento5 páginasChapter 4. FRC Manufacturing - Fundamental ConceptsNarendra GadkariAinda não há avaliações
- Grade 11 Electricity W.sheetDocumento6 páginasGrade 11 Electricity W.sheetUsman AmeenAinda não há avaliações
- Thermodynamics: ENG 214 Chapter 3 - Heat & Work in Open Systems Chapter 4 - The First Law of ThermodynamicsDocumento39 páginasThermodynamics: ENG 214 Chapter 3 - Heat & Work in Open Systems Chapter 4 - The First Law of ThermodynamicsGregory MacLeodAinda não há avaliações
- (52621001078) DM - DM Half Inch Flex Jumper Spec SheetDocumento2 páginas(52621001078) DM - DM Half Inch Flex Jumper Spec SheetmicroqualAinda não há avaliações
- Table StructureDocumento180 páginasTable StructureVictor PathakAinda não há avaliações
- Deep Drive - Customer Interface in AR - Oracle Apps EpicenterDocumento38 páginasDeep Drive - Customer Interface in AR - Oracle Apps Epicenterjeetu_87Ainda não há avaliações
- Important RCC Questions-Short and LongDocumento15 páginasImportant RCC Questions-Short and LongmailjoelsamuelAinda não há avaliações
- Structural MembersDocumento37 páginasStructural Membersmario gadianoAinda não há avaliações
- Understand and Troubleshoot Virtualized Domain Controller in Windows Server 8 BetaDocumento168 páginasUnderstand and Troubleshoot Virtualized Domain Controller in Windows Server 8 BetaChiTownITAinda não há avaliações
- Typical Signage Drawings: Information Sign ManualDocumento49 páginasTypical Signage Drawings: Information Sign ManualMaynard BaricaAinda não há avaliações
- C Ds Unit - II NotesDocumento50 páginasC Ds Unit - II NotesAshish ThirunagariAinda não há avaliações
- Engineering Journal::Review On Cold Rolling Mill Roll DeformationDocumento8 páginasEngineering Journal::Review On Cold Rolling Mill Roll DeformationEngineering JournalAinda não há avaliações
- 2014 - Solved Problems in Facility PlanningDocumento135 páginas2014 - Solved Problems in Facility Planninghshshdhd86% (7)
- H Beam Load Bearing CalculationDocumento31 páginasH Beam Load Bearing CalculationMuhammad Attiq Ur RahmanAinda não há avaliações
- Powershell Import Update Users Groups From CSV FileDocumento2 páginasPowershell Import Update Users Groups From CSV FilecrakchakibAinda não há avaliações
- Method of Statement For Electrical Works-UPDATEDocumento35 páginasMethod of Statement For Electrical Works-UPDATEWaleed AbdulsattarAinda não há avaliações
- Analysis+of+Non Symmetrical+Flapping+AirfoilsDocumento18 páginasAnalysis+of+Non Symmetrical+Flapping+AirfoilsAsif HameedAinda não há avaliações
- Microstrip Patch Antenna DesignDocumento19 páginasMicrostrip Patch Antenna DesignNgoc Lan Nguyen50% (2)
- HSE FRM 32 Final Incident ReportDocumento6 páginasHSE FRM 32 Final Incident ReportDilshad aliAinda não há avaliações
- SamplesDocumento14 páginasSamplesSanjayAinda não há avaliações
- AC DC AcDocumento3 páginasAC DC AcPhani KumarAinda não há avaliações
- Reinforced Concrete Design BS 8110Documento15 páginasReinforced Concrete Design BS 8110Kutty Mansoor75% (4)
- Work, Kinetic Energy and Potential EnergyDocumento28 páginasWork, Kinetic Energy and Potential EnergyMaey AkimAinda não há avaliações
- 10 - Design of Doubly Reinforced BeamsDocumento13 páginas10 - Design of Doubly Reinforced BeamsammarnakhiAinda não há avaliações
- Company ProfileDocumento6 páginasCompany ProfileFaidzil ChabibAinda não há avaliações
- Foxpro Treeview ControlDocumento5 páginasFoxpro Treeview ControlJulio RojasAinda não há avaliações