Você também pode gostar
- 205C Midterm 1 PDFDocumento18 páginas205C Midterm 1 PDFRaju RajaAinda não há avaliações
- Introduction to PCA and FA: Dimension Reduction ToolsDocumento29 páginasIntroduction to PCA and FA: Dimension Reduction ToolsPushpaRasnayakeAinda não há avaliações
- HallelujahDocumento6 páginasHallelujahRaju RajaAinda não há avaliações
- Manning Reading 1Documento1 páginaManning Reading 1Raju RajaAinda não há avaliações
- Courses and SyllabusDocumento4 páginasCourses and SyllabusRaju RajaAinda não há avaliações
- Mocks YouDocumento6 páginasMocks YouRaju RajaAinda não há avaliações
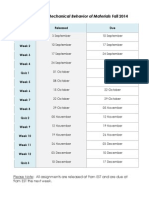
- Schedule: 3.032x Mechanical Behavior of Materials Fall 2014Documento1 páginaSchedule: 3.032x Mechanical Behavior of Materials Fall 2014Raju RajaAinda não há avaliações
- XyusedDocumento1 páginaXyusedRaju RajaAinda não há avaliações
- Stress-Strain Material Laws ExplainedDocumento16 páginasStress-Strain Material Laws ExplainedKevin JoseAinda não há avaliações
- Castigliano S TheoremDocumento19 páginasCastigliano S TheoremAhver ChaudharyAinda não há avaliações
- 2.2 Slope StabilityDocumento45 páginas2.2 Slope StabilityRaju RajaAinda não há avaliações
- OutputDocumento6 páginasOutputRaju RajaAinda não há avaliações
- OutputDocumento6 páginasOutputRaju RajaAinda não há avaliações
- New Text DocumenthcunbcjbDocumento1 páginaNew Text DocumenthcunbcjbRaju RajaAinda não há avaliações
- Slope Deflection MethodDocumento17 páginasSlope Deflection Methodmshahryar50% (2)
- 13 Determinacy and Kinematic Stability Notes Sp04Documento8 páginas13 Determinacy and Kinematic Stability Notes Sp04Aarna JainAinda não há avaliações
- Model Answers Quiz 2Documento5 páginasModel Answers Quiz 2Raju RajaAinda não há avaliações
- BTech Syllabus 2010+Documento26 páginasBTech Syllabus 2010+Aditya SharmaAinda não há avaliações
- Appx 'A'Documento1 páginaAppx 'A'Raju RajaAinda não há avaliações
- All BTechDocumento14 páginasAll BTechRaju RajaAinda não há avaliações
- All BTechDocumento14 páginasAll BTechRaju RajaAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- B.C Kuo Solutions 1Documento947 páginasB.C Kuo Solutions 1simply_tom100% (5)
- Nama = Nasywa Ghina NIM = 1910102006 Prodi = Sistem Informasi LatihanDocumento10 páginasNama = Nasywa Ghina NIM = 1910102006 Prodi = Sistem Informasi LatihanNidya AvrillizaAinda não há avaliações
- Machine Learning Kernels Spectral RepresentationDocumento14 páginasMachine Learning Kernels Spectral RepresentationalfonsoAinda não há avaliações
- Maths GR 10 SSIP Sessions 1-4 LHS (2013) Book 1rev.Documento21 páginasMaths GR 10 SSIP Sessions 1-4 LHS (2013) Book 1rev.Themba NyoniAinda não há avaliações
- Inverse Functions Domains and PropertiesDocumento1 páginaInverse Functions Domains and PropertiesKavin KanishkarAinda não há avaliações
- Grade 10 Math Curriculum Map for 2nd QuarterDocumento3 páginasGrade 10 Math Curriculum Map for 2nd QuarterMary Grace FresnediAinda não há avaliações
- Three Body Scattering Below Breakup Threshold An Approach Without Using Partial WavesDocumento21 páginasThree Body Scattering Below Breakup Threshold An Approach Without Using Partial WavesWolfgang SchadowAinda não há avaliações
- MMW - 6.1 Sets - Definitions and TerminologiesDocumento1 páginaMMW - 6.1 Sets - Definitions and TerminologiesJarvis RojoAinda não há avaliações
- Master Unit Plan (All Lesson Plans Compiled)Documento17 páginasMaster Unit Plan (All Lesson Plans Compiled)api-242122700100% (1)
- 1 Problems On Group Theory (By Dr. J. G. Mehta)Documento11 páginas1 Problems On Group Theory (By Dr. J. G. Mehta)AkankshaAinda não há avaliações
- Composite Simpson's MethodDocumento7 páginasComposite Simpson's MethodSan GukoAinda não há avaliações
- Week 1 Q&ADocumento3 páginasWeek 1 Q&AYork ZengAinda não há avaliações
- Division All Numerates Test AnswersDocumento52 páginasDivision All Numerates Test AnswersDianalyn Cabuso Tubiera100% (2)
- CONFIDENTIAL CALCULUS EXAMDocumento3 páginasCONFIDENTIAL CALCULUS EXAMnurul najwaAinda não há avaliações
- Mat183 - 2011, AprDocumento5 páginasMat183 - 2011, Aprawg azhimAinda não há avaliações
- CFD Unstructured Grid FormulationDocumento15 páginasCFD Unstructured Grid Formulationk krishna chaitanyaAinda não há avaliações
- Folium of DescartesDocumento3 páginasFolium of Descarteshsa00000Ainda não há avaliações
- Mathematics: Pearson IIT Foundation SeriesDocumento39 páginasMathematics: Pearson IIT Foundation SeriesKavita Dhoot100% (1)
- Possibilistic Approach For ClusteringDocumento4 páginasPossibilistic Approach For ClusteringRustam PasennangiAinda não há avaliações
- Lesson 11 3 Logarithms ExponentsDocumento13 páginasLesson 11 3 Logarithms Exponentsapi-233527181Ainda não há avaliações
- Year 5 Fractions Lesson 3 WorksheetDocumento3 páginasYear 5 Fractions Lesson 3 WorksheetCartogi fiAinda não há avaliações
- Graphs and Variations IDocumento16 páginasGraphs and Variations IAnthony BensonAinda não há avaliações
- Similarity and DissimilarityDocumento34 páginasSimilarity and DissimilarityAllison CollierAinda não há avaliações
- 101 - Full Derivative ReportDocumento25 páginas101 - Full Derivative ReportAmroKashtAinda não há avaliações
- TLMaths BUMPER Worksheet of Differential Equations (Separation of Variables)Documento14 páginasTLMaths BUMPER Worksheet of Differential Equations (Separation of Variables)startAinda não há avaliações
- Mathematics ETEA MCQ's For 1st YearDocumento64 páginasMathematics ETEA MCQ's For 1st YearMohan LalAinda não há avaliações
- SOLUTION MANUAL TITLEDocumento57 páginasSOLUTION MANUAL TITLENapster100% (1)
- Lect3 LongDocumento26 páginasLect3 LongOnur YazıcıAinda não há avaliações
- Section 1.1Documento10 páginasSection 1.1Mark B. BarrogaAinda não há avaliações
- MA8151 Engineering Mathematics SyllabusDocumento2 páginasMA8151 Engineering Mathematics SyllabusPAMANI1981Ainda não há avaliações