Você também pode gostar
- Machinedesign 3357 Abcs 123sDocumento8 páginasMachinedesign 3357 Abcs 123smikifit1Ainda não há avaliações
- AC Drives and Soft Starters Application GuideDocumento5 páginasAC Drives and Soft Starters Application GuideMinh TranAinda não há avaliações
- Voltage Sag Mitigation Using Dynamic Voltage Restorer SystemDocumento5 páginasVoltage Sag Mitigation Using Dynamic Voltage Restorer SystemAnonymous xaeuoo4Ainda não há avaliações
- Induction Motor ControlDocumento5 páginasInduction Motor ControlJournalNX - a Multidisciplinary Peer Reviewed JournalAinda não há avaliações
- Yaskawa Variable Frequency Drives WhitePaperDocumento16 páginasYaskawa Variable Frequency Drives WhitePaperBen CheungAinda não há avaliações
- Ansal 2016Documento4 páginasAnsal 201618031 SHIDERTH DEBNATHAinda não há avaliações
- Power Quality Improvement Using Dynamic Voltage RestorerDocumento4 páginasPower Quality Improvement Using Dynamic Voltage RestorerBONFRINGAinda não há avaliações
- NIDECDocumento18 páginasNIDECroyert8Ainda não há avaliações
- Is Now Part ofDocumento14 páginasIs Now Part ofchatty85Ainda não há avaliações
- Fairchild AN-6069 PDFDocumento14 páginasFairchild AN-6069 PDFtiohbengchuanAinda não há avaliações
- What Is A DriveDocumento4 páginasWhat Is A DriveJibjab7Ainda não há avaliações
- Sisngle Phase RectifierDocumento5 páginasSisngle Phase RectifiermücahitAinda não há avaliações
- MitigatingHarmonics Hoadley 0614Documento12 páginasMitigatingHarmonics Hoadley 0614andres monederoAinda não há avaliações
- Synthetic-Ripple Modulator For Synchronous Buck ConverterDocumento4 páginasSynthetic-Ripple Modulator For Synchronous Buck ConverterBishoo ShenoudaAinda não há avaliações
- Control Engineering - The Truth About Five Common VFD MythsDocumento9 páginasControl Engineering - The Truth About Five Common VFD MythsGanesh KumarAinda não há avaliações
- 29 2015 2-Design of Embedded EZ-source Inverter For The Integration of Renewable Energy Sources in Smart GridDocumento6 páginas29 2015 2-Design of Embedded EZ-source Inverter For The Integration of Renewable Energy Sources in Smart GridSai RameshAinda não há avaliações
- CIRED2011 0535 FinalDocumento4 páginasCIRED2011 0535 FinalUsman RasheedAinda não há avaliações
- VFD Working Principle, Types, AdvantagesDocumento17 páginasVFD Working Principle, Types, AdvantagesVijayalakshmi PatilAinda não há avaliações
- Power Efficient Motor Driver - VFD: Durgesh ChoudharyDocumento4 páginasPower Efficient Motor Driver - VFD: Durgesh ChoudharyerpublicationAinda não há avaliações
- Iceets 2013 6533563Documento9 páginasIceets 2013 6533563Steni MoaiAinda não há avaliações
- Chapter 3 NewDocumento14 páginasChapter 3 NewDhilip GMAinda não há avaliações
- Design Requirements For Brushless Permanent Magnet Generators For Use in Small Renewable Energy SystemsDocumento6 páginasDesign Requirements For Brushless Permanent Magnet Generators For Use in Small Renewable Energy SystemsAlaa OmarAinda não há avaliações
- Reduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterDocumento6 páginasReduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterRahardian TristantoAinda não há avaliações
- 5 Common Myths and Misconceptions About Variable Frequency DrivesDocumento9 páginas5 Common Myths and Misconceptions About Variable Frequency Drivesarun manchekarAinda não há avaliações
- Transformer-less DVR Compensates Voltage SagsDocumento6 páginasTransformer-less DVR Compensates Voltage SagsSwathi PrasadAinda não há avaliações
- Field-Oriented Control Decoupling Network for PWM InvertersDocumento5 páginasField-Oriented Control Decoupling Network for PWM InvertersJoseph NoumbissieAinda não há avaliações
- Variable Frecuency Drives For Fans PDFDocumento15 páginasVariable Frecuency Drives For Fans PDFReyes SanchezAinda não há avaliações
- Neumann 2010Documento6 páginasNeumann 2010هبهوب محمدAinda não há avaliações
- Comparison of PWM VFDs and Resonant Link Converters for Oilfield ESPsDocumento27 páginasComparison of PWM VFDs and Resonant Link Converters for Oilfield ESPsjhon mambyAinda não há avaliações
- An Approach To Eliminating High-Frequency Shaft Voltage and Leakage Current From An Inverter-Driven MotorDocumento7 páginasAn Approach To Eliminating High-Frequency Shaft Voltage and Leakage Current From An Inverter-Driven MotorPratiksha ShindeAinda não há avaliações
- Best PublicationsDocumento9 páginasBest PublicationsSai ReddyAinda não há avaliações
- Comparison of Current Mirror Circuits Using Pspice Simulation ToolDocumento4 páginasComparison of Current Mirror Circuits Using Pspice Simulation Toolsuyash_4376Ainda não há avaliações
- University of Engineering & Technology LahoreDocumento43 páginasUniversity of Engineering & Technology LahoreKantesh KumarAinda não há avaliações
- Variable Frequency DriveDocumento11 páginasVariable Frequency DriveNAYEEM100% (4)
- Operation and Application of Variable Frequency Drive (VFD) TechnologyDocumento11 páginasOperation and Application of Variable Frequency Drive (VFD) TechnologyFryjo FrancisAinda não há avaliações
- 15IPST013Documento7 páginas15IPST013Ahmed GhamriAinda não há avaliações
- VFD Cable SelectionDocumento10 páginasVFD Cable SelectionshoaibAinda não há avaliações
- Schneider Theory PDFDocumento12 páginasSchneider Theory PDFArbind KumarAinda não há avaliações
- Control of Single Phase Z-Source Inv Fed IM Using Boost ControllerDocumento5 páginasControl of Single Phase Z-Source Inv Fed IM Using Boost ControllerkeerthilakshmiAinda não há avaliações
- Variable Frequency Drive : Ravikumar .M M.Tech 3 SEM C.A.I.DDocumento22 páginasVariable Frequency Drive : Ravikumar .M M.Tech 3 SEM C.A.I.Davi013Ainda não há avaliações
- Ijser: Simulation of Active Front End Converter Based VFD For Induction MotorsDocumento6 páginasIjser: Simulation of Active Front End Converter Based VFD For Induction Motorsabdallah hosinAinda não há avaliações
- Uc Power Control PDFDocumento6 páginasUc Power Control PDFjokerAinda não há avaliações
- AED Notes SECTION BDocumento8 páginasAED Notes SECTION BShivam RaiAinda não há avaliações
- Dynamic Voltage Restorer Based On Voltage-Space-Vector PWM ControlDocumento9 páginasDynamic Voltage Restorer Based On Voltage-Space-Vector PWM ControlUzhansEell-neinoAinda não há avaliações
- Volta Ge Drop: Reassessing ConventionsDocumento10 páginasVolta Ge Drop: Reassessing Conventionslmn_grssAinda não há avaliações
- PK Reverse Power Flow Protection of Generator PaperDocumento4 páginasPK Reverse Power Flow Protection of Generator PaperTushar BehalpadeAinda não há avaliações
- VFD Basics: How to Combat Heat Loss and Harmonics From Variable Frequency DrivesDocumento5 páginasVFD Basics: How to Combat Heat Loss and Harmonics From Variable Frequency DrivesgachaturAinda não há avaliações
- MMLI-Project Report-FinalDocumento40 páginasMMLI-Project Report-FinalNaveen GollaAinda não há avaliações
- 1 Comparison - of - Traditional - Inverters - and - Z - Source - Inverter - For - Fuel - Cell - VehiclesDocumento11 páginas1 Comparison - of - Traditional - Inverters - and - Z - Source - Inverter - For - Fuel - Cell - Vehiclesramoha2514Ainda não há avaliações
- Mishra 2015Documento11 páginasMishra 2015Neethu Elizabeth MichaelAinda não há avaliações
- PWM Drive Filter Inductor Influence On Transient Immunity PAPERDocumento7 páginasPWM Drive Filter Inductor Influence On Transient Immunity PAPERpatrickAinda não há avaliações
- Global VFD Solutions White Paper 2020Documento10 páginasGlobal VFD Solutions White Paper 2020Felipe GustavoAinda não há avaliações
- Working Applications of Direct Current DC Shunt MotorDocumento2 páginasWorking Applications of Direct Current DC Shunt Motorfahad pirzadaAinda não há avaliações
- Wind turbine power electronics convertersDocumento10 páginasWind turbine power electronics convertersŠämęh ËšśämAinda não há avaliações
- Introduction to Solar InvertersDocumento5 páginasIntroduction to Solar InvertersSandeep JoshiAinda não há avaliações
- Research of Single-Phase Inverter For PV Modules With MPPTDocumento4 páginasResearch of Single-Phase Inverter For PV Modules With MPPTAl Bajad MamadAinda não há avaliações
- Pwmlii SepicDocumento8 páginasPwmlii SepicEmre DemirAinda não há avaliações
- Operational Amplifier Circuits: Analysis and DesignNo EverandOperational Amplifier Circuits: Analysis and DesignNota: 4.5 de 5 estrelas4.5/5 (2)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesAinda não há avaliações
- ZLT s10 Dialog UsermanualDocumento2 páginasZLT s10 Dialog Usermanualpaniya100% (1)
- Brass Low Pressure Ball ValvesDocumento1 páginaBrass Low Pressure Ball ValvespaniyaAinda não há avaliações
- Alnor EBT720 - 721 Data SheetDocumento2 páginasAlnor EBT720 - 721 Data SheetpaniyaAinda não há avaliações
- Removal & Installation: Suspension Tire Pressure Monitoring System - Service Information - HR-VDocumento1 páginaRemoval & Installation: Suspension Tire Pressure Monitoring System - Service Information - HR-VpaniyaAinda não há avaliações
- DTC Troubleshooting: Before You Troubleshoot, Review The General Troubleshooting InformationDocumento32 páginasDTC Troubleshooting: Before You Troubleshoot, Review The General Troubleshooting InformationpaniyaAinda não há avaliações
- Rugged 5-In-1 Environmental MeterDocumento1 páginaRugged 5-In-1 Environmental MeterpaniyaAinda não há avaliações
- Gree Manual p4Documento13 páginasGree Manual p4paniyaAinda não há avaliações
- Remove evaporator assy from air conditioner service manualDocumento13 páginasRemove evaporator assy from air conditioner service manualpaniyaAinda não há avaliações
- Service Manual Installation GuideDocumento13 páginasService Manual Installation GuidepaniyaAinda não há avaliações
- Gree Manual p2Documento13 páginasGree Manual p2paniyaAinda não há avaliações
- Gree Manual p1Documento13 páginasGree Manual p1paniyaAinda não há avaliações
- Description: Eps System Description - Eps ControlDocumento34 páginasDescription: Eps System Description - Eps ControlpaniyaAinda não há avaliações
- S-849 - December 2018 Page - 3Documento1 páginaS-849 - December 2018 Page - 3paniyaAinda não há avaliações
- Removal & Installation: Steering EPS Motor / Control Unit - Service Information - HR-VDocumento2 páginasRemoval & Installation: Steering EPS Motor / Control Unit - Service Information - HR-VpaniyaAinda não há avaliações
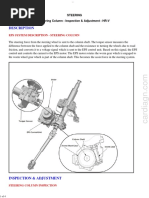
- HR-V Steering Column Inspection ProcedureDocumento4 páginasHR-V Steering Column Inspection ProcedurepaniyaAinda não há avaliações
- Datenblatt / Data Sheet U51DL-012KK-5Documento6 páginasDatenblatt / Data Sheet U51DL-012KK-5paniyaAinda não há avaliações
- Specification Table: Standards and Service LimitsDocumento11 páginasSpecification Table: Standards and Service Limitsvadim vadimAinda não há avaliações
- Torque Specifications (Ka/Kc Models)Documento5 páginasTorque Specifications (Ka/Kc Models)paniyaAinda não há avaliações
- Helix Portable Ventilators: Sustainable First Choice FlexibleDocumento3 páginasHelix Portable Ventilators: Sustainable First Choice FlexiblepaniyaAinda não há avaliações
- S-849 - December 2018 Page - 5Documento1 páginaS-849 - December 2018 Page - 5paniyaAinda não há avaliações
- Datenblatt / Data Sheet U51DL-012KK-5Documento6 páginasDatenblatt / Data Sheet U51DL-012KK-5paniyaAinda não há avaliações
- S-849 - December 2018 Page - 6Documento1 páginaS-849 - December 2018 Page - 6paniyaAinda não há avaliações
- Ambu PEEP ValvesDocumento2 páginasAmbu PEEP ValvespaniyaAinda não há avaliações
- Frank's Oxygen ConcentratorsDocumento1 páginaFrank's Oxygen ConcentratorspaniyaAinda não há avaliações
- 18200776-1c15-496d-8e17-9b69d4f11289Documento2 páginas18200776-1c15-496d-8e17-9b69d4f11289rdbranaweeraAinda não há avaliações
- AUS PEEPValves 493480097 V02 0712Documento2 páginasAUS PEEPValves 493480097 V02 0712paniyaAinda não há avaliações
- Ambu PEEP ValvesDocumento2 páginasAmbu PEEP ValvespaniyaAinda não há avaliações
- IE PEEPValve 493480001 V03 0413 PDFDocumento2 páginasIE PEEPValve 493480001 V03 0413 PDFCoffee ĐenAinda não há avaliações
- Diaphragm Pump - CompressorDocumento2 páginasDiaphragm Pump - CompressorpaniyaAinda não há avaliações
- 18200776-1c15-496d-8e17-9b69d4f11289Documento2 páginas18200776-1c15-496d-8e17-9b69d4f11289rdbranaweeraAinda não há avaliações
- SolidWorks Simulation Professional TrainingDocumento104 páginasSolidWorks Simulation Professional TrainingAnonymous NonQwK3qL275% (4)
- Exercises For TFFY54Documento25 páginasExercises For TFFY54sattar28Ainda não há avaliações
- USM 32X Operating Manual PDFDocumento188 páginasUSM 32X Operating Manual PDFcorey jacobsAinda não há avaliações
- Cement autoclave instruction manualDocumento4 páginasCement autoclave instruction manualShreya Test HouseAinda não há avaliações
- GV Actuator Adv. Rev.4 (Webinar)Documento37 páginasGV Actuator Adv. Rev.4 (Webinar)Boriche DivitisAinda não há avaliações
- Water Resources EngineeringDocumento1.199 páginasWater Resources EngineeringVikaas Jha97% (35)
- Lab Manual for Ionization Isomer SynthesisDocumento8 páginasLab Manual for Ionization Isomer SynthesisDhika AmeliaAinda não há avaliações
- Physics: Pearson Edexcel GCEDocumento24 páginasPhysics: Pearson Edexcel GCERabia HasanAinda não há avaliações
- Operation Guide 3159: Getting AcquaintedDocumento6 páginasOperation Guide 3159: Getting AcquaintedhenkAinda não há avaliações
- Solar PV Power Plant Underground Cable Sizing Case StudyDocumento7 páginasSolar PV Power Plant Underground Cable Sizing Case StudyNavneet SinghAinda não há avaliações
- SANY RSC45 Container Reach Stacker Maintenance Manual PDFDocumento29 páginasSANY RSC45 Container Reach Stacker Maintenance Manual PDFejaz100% (6)
- Technical & Service ManualDocumento90 páginasTechnical & Service ManualStefano FerrariAinda não há avaliações
- Protein Tertiary and Quaternary StructureDocumento18 páginasProtein Tertiary and Quaternary Structuremaryscribd241Ainda não há avaliações
- B Voc Renewable EnergyDocumento4 páginasB Voc Renewable EnergyBlessy JoyAinda não há avaliações
- 1 12 020 Is A105n - DatasheetDocumento3 páginas1 12 020 Is A105n - DatasheetRico Eka ArfiansyahAinda não há avaliações
- Forensic Photography TechniquesDocumento6 páginasForensic Photography TechniquesPrecious ImperialAinda não há avaliações
- Standard Radiographic Technique ChartDocumento12 páginasStandard Radiographic Technique ChartAlthea Amor CambarijanAinda não há avaliações
- Environmental Test Chamber - Envisys TechDocumento13 páginasEnvironmental Test Chamber - Envisys TechEnvisys Technologies Pvt LtdAinda não há avaliações
- Siemens Test ManualDocumento61 páginasSiemens Test ManualknsbAinda não há avaliações
- Welding HandbookDocumento729 páginasWelding HandbookIvan Dario BenitezAinda não há avaliações
- 2017 Facilities Standards (P100) PDFDocumento358 páginas2017 Facilities Standards (P100) PDFBhingle Abellera100% (1)
- PAPER SIDIQ ICOS FixDocumento7 páginasPAPER SIDIQ ICOS FixAtika AssalafiyahAinda não há avaliações
- FullReport Status Quo Analysis of Various Segments of Electric Mobility-CompressedDocumento342 páginasFullReport Status Quo Analysis of Various Segments of Electric Mobility-CompressedNishi MandaviaAinda não há avaliações
- Ecu MappingDocumento8 páginasEcu MappingVitor SegniniAinda não há avaliações
- Actuators & Positioners Linear Pneumatic Actuators: Data SheetDocumento10 páginasActuators & Positioners Linear Pneumatic Actuators: Data SheetTai Dang HuyAinda não há avaliações
- Work and Energy Formula SheetDocumento3 páginasWork and Energy Formula SheetimkushofficialAinda não há avaliações
- Ae3491e7 Yearly Review of National Affairs 2018 PDFDocumento280 páginasAe3491e7 Yearly Review of National Affairs 2018 PDFManjunath MallannavarAinda não há avaliações
- Concept of Net Zero Energy Buildings (NZEB) - A Literature ReviewDocumento16 páginasConcept of Net Zero Energy Buildings (NZEB) - A Literature ReviewJaime PazAinda não há avaliações
- Mesura Nirmal CatalogDocumento48 páginasMesura Nirmal CatalogShivBharatAinda não há avaliações