Você também pode gostar
- Lab.2 - Electrònica II - Amplificadores Cascada - Jerson Orlando - 11411205Documento21 páginasLab.2 - Electrònica II - Amplificadores Cascada - Jerson Orlando - 11411205JersonAinda não há avaliações
- Taller #1 Comunicaciones Eléctronicas.Documento6 páginasTaller #1 Comunicaciones Eléctronicas.oscar azaAinda não há avaliações
- Modulacion AMDocumento23 páginasModulacion AMAlexis ParienteAinda não há avaliações
- Modulación y Demodulación PMDocumento7 páginasModulación y Demodulación PMIvan Anaya (INTHEPROD)Ainda não há avaliações
- Solucionario BMA22 PRACTICA 01Documento4 páginasSolucionario BMA22 PRACTICA 01Brent Quispe PalacinAinda não há avaliações
- Parametros de AdmitanciaDocumento1 páginaParametros de AdmitanciaCajamarca AlexAinda não há avaliações
- Guia Ondas PDFDocumento24 páginasGuia Ondas PDFNelson SalasarAinda não há avaliações
- Neaman Libro Electrónica - FRECUENCIADocumento91 páginasNeaman Libro Electrónica - FRECUENCIAJhon VejarAinda não há avaliações
- AM SíncronoDocumento3 páginasAM SíncronoEmmanuel HerreraAinda não há avaliações
- Guia de Aprendizaje No 6 Lineas Y AntenasDocumento17 páginasGuia de Aprendizaje No 6 Lineas Y AntenasWillian Barrera100% (1)
- Medios de Transmision-Guias de Onada CilindricasDocumento6 páginasMedios de Transmision-Guias de Onada CilindricasKaren luciaAinda não há avaliações
- Componentes Pasivos en Alta FrecuenciaDocumento26 páginasComponentes Pasivos en Alta FrecuenciaIsmael Arias InostrozaAinda não há avaliações
- Amplificador - Clase CDocumento12 páginasAmplificador - Clase CRodrigo Mare100% (2)
- Transformada Z TrabajoDocumento13 páginasTransformada Z TrabajoOsmara Cruz HernandezAinda não há avaliações
- Circuito Sintonizado Doble SintoniaDocumento15 páginasCircuito Sintonizado Doble SintoniaMiguel Angel SucsoAinda não há avaliações
- Demodulador FSK Mediante PLLDocumento11 páginasDemodulador FSK Mediante PLLE Paolo Carbajal CAinda não há avaliações
- Laboratorio 06 - QPSKDocumento11 páginasLaboratorio 06 - QPSKMichael HughesAinda não há avaliações
- Lab. Radiocomunicaciones-Informe Previo3Documento2 páginasLab. Radiocomunicaciones-Informe Previo3Andrés APAinda não há avaliações
- Práctica 02 Osciladores RFDocumento7 páginasPráctica 02 Osciladores RFbartolome777ooAinda não há avaliações
- InforMe Electronicos 2Documento5 páginasInforMe Electronicos 2miltonAinda não há avaliações
- Lab 3Documento6 páginasLab 3DUMAR YEKSEL BASTO MORENOAinda não há avaliações
- Técnicas de Modulación de AmplitudDocumento27 páginasTécnicas de Modulación de AmplitudAlcides Javier QuijadaAinda não há avaliações
- Laboratorio de OsciladoresDocumento11 páginasLaboratorio de OsciladoresFrancisco HidalgoAinda não há avaliações
- Caracteristica Exponencial BJTDocumento3 páginasCaracteristica Exponencial BJTJhazzel Cruz MendozaAinda não há avaliações
- Amplificador No Inversor Como Conpensador de DesajusteDocumento3 páginasAmplificador No Inversor Como Conpensador de Desajustemilo_andyAinda não há avaliações
- Moduladores de AmplitudDocumento7 páginasModuladores de AmplitudFelipe AlarconAinda não há avaliações
- 2021 02 22 Clase de Ondas Guiadas Esime 5.1 m1Documento7 páginas2021 02 22 Clase de Ondas Guiadas Esime 5.1 m1FEDRA FARCA VILLAVICENCIOAinda não há avaliações
- Cap1tomasi JZ MTDocumento27 páginasCap1tomasi JZ MTOscar Rodriguez100% (1)
- PLL 4046Documento9 páginasPLL 4046exeluc75100% (1)
- Laboratorio FMDocumento6 páginasLaboratorio FMArvei Galvis Castrillon50% (2)
- Fuentes ConmutadasDocumento2 páginasFuentes ConmutadasLaura GrimaldosAinda não há avaliações
- Transformador ToroidalDocumento18 páginasTransformador ToroidalJorge MaldoAinda não há avaliações
- Lambda CuartosDocumento15 páginasLambda CuartosGustavo AmericoAinda não há avaliações
- Amplificador de PotenciaDocumento6 páginasAmplificador de PotenciaCarlos Enrique Arrieche BonillaAinda não há avaliações
- 5 El Amplificador Operacional IdealDocumento8 páginas5 El Amplificador Operacional Idealgerar503Ainda não há avaliações
- 03 Antenas y Lineas de Transmision Es v3.0 NotesDocumento39 páginas03 Antenas y Lineas de Transmision Es v3.0 NotesAntonio GonzalezAinda não há avaliações
- 211 EE458M PrevioN°1 BlasPeraltaSebastiánDocumento5 páginas211 EE458M PrevioN°1 BlasPeraltaSebastiánSebastián Blas100% (1)
- Antenas de LazoDocumento46 páginasAntenas de LazoCharlie BskzAinda não há avaliações
- Resonancia Serie - ParaleloDocumento10 páginasResonancia Serie - ParaleloDavis KailAinda não há avaliações
- Ejemplos OsciladoresDocumento42 páginasEjemplos OsciladoresSandro ZNAinda não há avaliações
- Aplicacion de Diodo en L Telefonia MovilDocumento14 páginasAplicacion de Diodo en L Telefonia MovilClever Apz0% (2)
- EP - 5 Guias de OndasDocumento3 páginasEP - 5 Guias de Ondasleotk100% (1)
- Amplificadores de Potencia en RFDocumento64 páginasAmplificadores de Potencia en RFalejo_1994244644Ainda não há avaliações
- Modulacion AmDocumento7 páginasModulacion AmSergio AlvesAinda não há avaliações
- Taller-02-PROPAGACION DE ONDAS ELECTROMAGNETICASDocumento10 páginasTaller-02-PROPAGACION DE ONDAS ELECTROMAGNETICASjuan prietoAinda não há avaliações
- Informe UJTDocumento2 páginasInforme UJTIan AsAinda não há avaliações
- Informe Montaje de Fuente de Poder Dual VariableDocumento15 páginasInforme Montaje de Fuente de Poder Dual VariableJorge Rivera100% (1)
- Conformadores de OndaDocumento7 páginasConformadores de OndaCarolina Castro VillacìsAinda não há avaliações
- SCR en Ac y DCDocumento6 páginasSCR en Ac y DCManu AceAinda não há avaliações
- Trabajo Circuitos Resonantes y Filtros PDFDocumento14 páginasTrabajo Circuitos Resonantes y Filtros PDFJose Perez Vargas100% (1)
- Mezcladores Activos WordDocumento5 páginasMezcladores Activos WordBenjhy Brian Matheus QuispeAinda não há avaliações
- Práctica 4 Amplificador RF Ps.Documento10 páginasPráctica 4 Amplificador RF Ps.David GomezAinda não há avaliações
- Cómo Influye La Amplitud de La Señal Portadora en La Salida Del ModuladorDocumento2 páginasCómo Influye La Amplitud de La Señal Portadora en La Salida Del ModuladorKevin MaldonadoAinda não há avaliações
- Antenas de Apertura PDFDocumento23 páginasAntenas de Apertura PDFkevin freireAinda não há avaliações
- Informe OFDMDocumento15 páginasInforme OFDMEdwin VelasteguiAinda não há avaliações
- Antena HelicoidalDocumento50 páginasAntena Helicoidalylverprado100% (1)
- Informe 5Documento11 páginasInforme 5JimenaSanchezAinda não há avaliações
- Informe 2 Adrian VazquezDocumento12 páginasInforme 2 Adrian VazquezCarlos OchoaAinda não há avaliações
- Practica 3 ESTUDIO DE LA CARGA Y DESCARGDocumento24 páginasPractica 3 ESTUDIO DE LA CARGA Y DESCARGDavid molinAinda não há avaliações
- Fase 3Documento18 páginasFase 3Jeyder FonsecaAinda não há avaliações
- Abscesos ApicalesDocumento26 páginasAbscesos ApicalesUriel Hdz ColoradoAinda não há avaliações
- Energia Primaria-Secundaria y Final - UNAMDocumento29 páginasEnergia Primaria-Secundaria y Final - UNAMUriel Hdz ColoradoAinda não há avaliações
- Intensidad EnergéticaDocumento4 páginasIntensidad EnergéticaUriel Hdz ColoradoAinda não há avaliações
- Energia Primaria-Secundaria y Final - UNAMDocumento29 páginasEnergia Primaria-Secundaria y Final - UNAMUriel Hdz ColoradoAinda não há avaliações
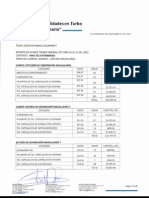
- Tiempo Normal, Magallanes OCT.Documento6 páginasTiempo Normal, Magallanes OCT.Uriel Hdz ColoradoAinda não há avaliações
- Carta para ToñoDocumento1 páginaCarta para ToñoUriel Hdz ColoradoAinda não há avaliações
- BalanDocumento3 páginasBalanUriel Hdz ColoradoAinda não há avaliações