Você também pode gostar
- For Buildings and Other Structures For Wind LoadsDocumento28 páginasFor Buildings and Other Structures For Wind LoadsMarinos Giannoukakis100% (1)
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityNo EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityAinda não há avaliações
- GL 007Documento19 páginasGL 007444462Ainda não há avaliações
- Barracuda and Caratinga Crude Oil Fields ProductionDocumento20 páginasBarracuda and Caratinga Crude Oil Fields Productionricky0201Ainda não há avaliações
- ABS Fatigue Life Assessment 2014Documento1 páginaABS Fatigue Life Assessment 2014Fandy SipataAinda não há avaliações
- API 650 Storage Tank HRD - SubDocumento7 páginasAPI 650 Storage Tank HRD - SubBimal DeyAinda não há avaliações
- FPSO & Platform Structural Analysis RecommendationsDocumento4 páginasFPSO & Platform Structural Analysis RecommendationsRao MadepalliAinda não há avaliações
- DNV Os C102Documento133 páginasDNV Os C102Wilson Barreta JuniorAinda não há avaliações
- DNV 30.5Documento40 páginasDNV 30.5Ile Ibrahim0% (1)
- Seismic Loading on Saddle CylinderDocumento11 páginasSeismic Loading on Saddle CylinderAnthony Dudley0% (1)
- Section A: 2.1. Sling Design Load and SelectionDocumento30 páginasSection A: 2.1. Sling Design Load and SelectionThomas StephenAinda não há avaliações
- DNV 1996Documento22 páginasDNV 1996ankeshkatochAinda não há avaliações
- Proof: Time of Wetness in Tropical Climate: Considerations On The Estimation of TOW According To ISO 9223 StandardDocumento14 páginasProof: Time of Wetness in Tropical Climate: Considerations On The Estimation of TOW According To ISO 9223 StandardWalter Wolph FerrierAinda não há avaliações
- Facilities On Offshore Installations: Guide For Building and ClassingDocumento209 páginasFacilities On Offshore Installations: Guide For Building and ClassingKarthick VenkatswamyAinda não há avaliações
- P01-E06 Rev 3 Mar 2022 Pipe Support Criteria For Metallic PipingDocumento17 páginasP01-E06 Rev 3 Mar 2022 Pipe Support Criteria For Metallic PipingMohamed AdelAinda não há avaliações
- Geological Storage Site Screening and ApprovalDocumento56 páginasGeological Storage Site Screening and ApprovalIbukun OpeyemiAinda não há avaliações
- Nozzle Loads - Part 1 - Piping-EngineeringDocumento5 páginasNozzle Loads - Part 1 - Piping-EngineeringShaikh AftabAinda não há avaliações
- 39-29computational Buckling Analysis of Wind Loaded5-1-PBDocumento9 páginas39-29computational Buckling Analysis of Wind Loaded5-1-PBzaneliuAinda não há avaliações
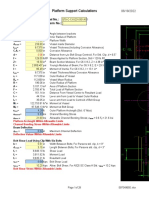
- Platform Calculation (Jan 22-2012)Documento28 páginasPlatform Calculation (Jan 22-2012)SAMER OSMANAinda não há avaliações
- Astm B 729 - 2000 PDFDocumento2 páginasAstm B 729 - 2000 PDFLemir LopezAinda não há avaliações
- Sloshing Loads in Liquid-Storage Tanks With InsuffDocumento9 páginasSloshing Loads in Liquid-Storage Tanks With Insuffjchavesz6100% (1)
- Mathcad - Sandy SoilDocumento1 páginaMathcad - Sandy SoillsatchithananthanAinda não há avaliações
- Stresses in Large Horizontal Cylindrical Pressure Vessels On Two Saddle SupportsDocumento12 páginasStresses in Large Horizontal Cylindrical Pressure Vessels On Two Saddle SupportsAnonymous qhVGVpAinda não há avaliações
- WRC-107 lifting lug calculations procedureDocumento5 páginasWRC-107 lifting lug calculations procedureManoj MulikAinda não há avaliações
- Etab RSM Eccc Basics SCMDocumento2 páginasEtab RSM Eccc Basics SCMsathiyaseelann.sAinda não há avaliações
- Modeling Topside Structures in SACSDocumento11 páginasModeling Topside Structures in SACSnazeer_mohdAinda não há avaliações
- Bolt Head Fillet Stress Concentration Factors in Cylindrical Pressure VesselsDocumento6 páginasBolt Head Fillet Stress Concentration Factors in Cylindrical Pressure Vesselsacadjournals. comAinda não há avaliações
- Design of Saddle Support For VesselDocumento5 páginasDesign of Saddle Support For Vesseltvmehta01Ainda não há avaliações
- Norsok Standard Structural DesignDocumento19 páginasNorsok Standard Structural Designsamprof4vwAinda não há avaliações
- Out of Roundnesscalculations:: Max MinDocumento6 páginasOut of Roundnesscalculations:: Max MinAdekimi EmmanuelAinda não há avaliações
- Technical Information HSL3Documento10 páginasTechnical Information HSL3William VillamizarAinda não há avaliações
- GRI DurlonTechnicalHandbookDocumento30 páginasGRI DurlonTechnicalHandbookFrank RamirezAinda não há avaliações
- Padeye Design AnalysisDocumento8 páginasPadeye Design AnalysisMyatmyat SwewinAinda não há avaliações
- Proposed SACS training programDocumento2 páginasProposed SACS training programLaurentiu TeacaAinda não há avaliações
- Fiberglass Tank Saddle Support DetailsDocumento1 páginaFiberglass Tank Saddle Support Detailsxaaabbb_550464353Ainda não há avaliações
- Effective Length Factor For DiscontinuousDocumento7 páginasEffective Length Factor For Discontinuoussaber javidAinda não há avaliações
- The Ow Pattern and Entropy Generation in An Axial Inlet Cyclone With Re Ux Cone and Gaps in The Vortex FinderDocumento12 páginasThe Ow Pattern and Entropy Generation in An Axial Inlet Cyclone With Re Ux Cone and Gaps in The Vortex FinderdadAinda não há avaliações
- Trunnion Check - Node 710Documento13 páginasTrunnion Check - Node 710Prashant ChauhanAinda não há avaliações
- CS-Guide CalculationDocumento27 páginasCS-Guide Calculationduf fuAinda não há avaliações
- Buckling of Conical Shells Under ExternalDocumento81 páginasBuckling of Conical Shells Under Externalabdulsalam yousifAinda não há avaliações
- Froude-Krylov Force CoefficientDocumento20 páginasFroude-Krylov Force CoefficientLazaros NtoanidisAinda não há avaliações
- 22BMJ 045 FEA 07 - Rev 0 - 23.07.05Documento13 páginas22BMJ 045 FEA 07 - Rev 0 - 23.07.05TEP DesignAinda não há avaliações
- FRONT END ENGINEERING DESIGN - PART II SPECIFICATIONDocumento41 páginasFRONT END ENGINEERING DESIGN - PART II SPECIFICATIONMohd. Fadhil JamirinAinda não há avaliações
- Xcalcs Engineering Calculations WRC2972Documento3 páginasXcalcs Engineering Calculations WRC2972hacenescribdAinda não há avaliações
- Technical DataDocumento48 páginasTechnical Datashekhar2681Ainda não há avaliações
- Consideraciones Sismicas para Contenedores de LiquidoDocumento21 páginasConsideraciones Sismicas para Contenedores de Liquidodavid gonzalezAinda não há avaliações
- Fatigue Analysis of AL SHAHEEN Field Crown PlateDocumento9 páginasFatigue Analysis of AL SHAHEEN Field Crown PlateRajat KatyalAinda não há avaliações
- Hemispherical HeadDocumento5 páginasHemispherical HeadPuRuiSen HelathchemicalAinda não há avaliações
- Compress Manual 2.4.'Documento19 páginasCompress Manual 2.4.'sksiddiqueAinda não há avaliações
- FINITE ELEMENT ANALYSIS OF STEEL STORAGE TANKDocumento8 páginasFINITE ELEMENT ANALYSIS OF STEEL STORAGE TANKBala SutharshanAinda não há avaliações
- Hydrodynamic Force ReportDocumento7 páginasHydrodynamic Force ReportengineeringyusufAinda não há avaliações
- SFD API RP 2A WSD 21stDocumento23 páginasSFD API RP 2A WSD 21stputra wiraAinda não há avaliações
- SFD API RP 2a WSD 22ndDocumento19 páginasSFD API RP 2a WSD 22ndRoberto Andrés Fernández DomínguezAinda não há avaliações
- SFD API RP 2A WSD 22ndDocumento19 páginasSFD API RP 2A WSD 22ndputra wiraAinda não há avaliações
- SFD N004 2013 PDFDocumento21 páginasSFD N004 2013 PDFMohamed Abo-ZaidAinda não há avaliações
- Steel Frame Design Manual: Norsok N-004 2013Documento21 páginasSteel Frame Design Manual: Norsok N-004 2013Angel VargasAinda não há avaliações
- Steel Frame Design Manual: Italian NTC 2008Documento99 páginasSteel Frame Design Manual: Italian NTC 2008Angel VargasAinda não há avaliações
- Steel Frame Design Manual: Italian NTC 2008Documento96 páginasSteel Frame Design Manual: Italian NTC 2008Haytham ZaghloulAinda não há avaliações
- Foundation 1 Design ReportDocumento7 páginasFoundation 1 Design ReportEdwinBastidasAinda não há avaliações
- SFD Ec3 Ec8Documento79 páginasSFD Ec3 Ec8Rada IoanAinda não há avaliações
- Calculation Sheet: Title: Structure Design Location: Rev.: BDocumento1 páginaCalculation Sheet: Title: Structure Design Location: Rev.: Biwanguna71Ainda não há avaliações
- SEO-OPTIMIZED TITLE FOR WIKA PC SPUN PILE SPECIFICATIONDocumento3 páginasSEO-OPTIMIZED TITLE FOR WIKA PC SPUN PILE SPECIFICATIONiwanguna71Ainda não há avaliações
- Calculation Sheet: D B F VDocumento1 páginaCalculation Sheet: D B F Viwanguna71Ainda não há avaliações
- Calculation Sheet: 6.2. Support ReactionsDocumento1 páginaCalculation Sheet: 6.2. Support Reactionsiwanguna71Ainda não há avaliações
- CTT Elastomeric BearingsDocumento20 páginasCTT Elastomeric Bearingsjajaytt100% (1)
- SKorea Seoul Map KoreaENGDocumento1 páginaSKorea Seoul Map KoreaENGiwanguna71Ainda não há avaliações
- 44Documento1 página44iwanguna71Ainda não há avaliações
- Calculation Sheet: 5. Penulangan Pilecap: STA 0+975 STA 1+175Documento1 páginaCalculation Sheet: 5. Penulangan Pilecap: STA 0+975 STA 1+175iwanguna71Ainda não há avaliações
- Calculation Sheet: F A A B F F A A ADocumento1 páginaCalculation Sheet: F A A B F F A A Aiwanguna71Ainda não há avaliações
- Basic Definitions of Soils PDFDocumento7 páginasBasic Definitions of Soils PDFAntónio FontesAinda não há avaliações
- Calculation Sheet: Min - Max Rebar Check: Min RebarDocumento1 páginaCalculation Sheet: Min - Max Rebar Check: Min Rebariwanguna71Ainda não há avaliações
- CTT Elastomeric BearingsDocumento20 páginasCTT Elastomeric Bearingsjajaytt100% (1)
- Calculation Sheet: B F F A A ADocumento1 páginaCalculation Sheet: B F F A A Aiwanguna71Ainda não há avaliações
- Calculation Sheet: 1.4 Pilehead ReinforcementDocumento1 páginaCalculation Sheet: 1.4 Pilehead Reinforcementiwanguna71Ainda não há avaliações
- sm1 4 WWWDocumento21 páginassm1 4 WWWAnonymous D5s00DdUAinda não há avaliações
- Solutions Looking For Problems... : BeamsDocumento16 páginasSolutions Looking For Problems... : BeamslifeadventureAinda não há avaliações
- CrossDocumento1 páginaCrossiwanguna71Ainda não há avaliações
- (Idn) Wjqt-140117-01 Aerial Cable 12 - 24fDocumento1 página(Idn) Wjqt-140117-01 Aerial Cable 12 - 24fiwanguna71Ainda não há avaliações
- BRidge Rating MEthodDocumento22 páginasBRidge Rating MEthodiwanguna71Ainda não há avaliações
- Spun Pile Wika-Tp 800&1000Documento3 páginasSpun Pile Wika-Tp 800&1000iwanguna71100% (1)
- BRidge Rating MEthod PDFDocumento22 páginasBRidge Rating MEthod PDFiwanguna71Ainda não há avaliações
- Key To Test DataDocumento1 páginaKey To Test DataRheymar Dela Rosa DiwaAinda não há avaliações
- Laboratory study of Marshall properties and durability of asphalt concreteDocumento84 páginasLaboratory study of Marshall properties and durability of asphalt concreteNana SupriatnaAinda não há avaliações
- Especificaciones Tanques de AceroDocumento6 páginasEspecificaciones Tanques de AcerojhobanybernalAinda não há avaliações
- ASCE ASD Load CombinationsDocumento2 páginasASCE ASD Load Combinationsrodriguez.gaytanAinda não há avaliações
- Belt Conveyor PDFDocumento33 páginasBelt Conveyor PDFiwanguna71100% (1)
- Standard Tightening TorqueDocumento1 páginaStandard Tightening TorquebalramkinageAinda não há avaliações
- Bolt Tightening ForceDocumento1 páginaBolt Tightening Forceiwanguna71Ainda não há avaliações
- The Seasons of Life by Jim RohnDocumento111 páginasThe Seasons of Life by Jim RohnChristine Mwaura97% (29)
- System Bus in Computer Architecture: Goran Wnis Hama AliDocumento34 páginasSystem Bus in Computer Architecture: Goran Wnis Hama AliGoran WnisAinda não há avaliações
- Hempathane Topcoat 55219 Base 5521967280 En-UsDocumento11 páginasHempathane Topcoat 55219 Base 5521967280 En-UsSantiago Rafael Galarza JacomeAinda não há avaliações
- Hci01 HumanComputerInteraction OverviewDocumento140 páginasHci01 HumanComputerInteraction OverviewAlexSpiridonAinda não há avaliações
- Srimanta Shankardev: Early LifeDocumento3 páginasSrimanta Shankardev: Early LifeAnusuya BaruahAinda não há avaliações
- Math 7: "The Nearest Approximation To An Understanding of Life Is To Feel It and Realize It To The Fullest."Documento16 páginasMath 7: "The Nearest Approximation To An Understanding of Life Is To Feel It and Realize It To The Fullest."benjamin ladesma0% (1)
- Encrypt and decrypt a file using AESDocumento5 páginasEncrypt and decrypt a file using AESShaunak bagadeAinda não há avaliações
- 1.an Overview On Membrane Strategies For Rare Earths Extraction and Separation - 2017Documento36 páginas1.an Overview On Membrane Strategies For Rare Earths Extraction and Separation - 2017Vasile AlexandraAinda não há avaliações
- The Leaders of The NationDocumento3 páginasThe Leaders of The NationMark Dave RodriguezAinda não há avaliações
- Nurses Week Program InvitationDocumento2 páginasNurses Week Program InvitationBenilda TuanoAinda não há avaliações
- Strategicmanagement Finalpaper 2ndtrisem 1819Documento25 páginasStrategicmanagement Finalpaper 2ndtrisem 1819Alyanna Parafina Uy100% (1)
- GooglepreviewDocumento69 páginasGooglepreviewtarunchatAinda não há avaliações
- Peptan - All About Collagen Booklet-1Documento10 páginasPeptan - All About Collagen Booklet-1Danu AhmadAinda não há avaliações
- Stress-Busting Plan for Life's ChallengesDocumento3 páginasStress-Busting Plan for Life's Challengesliera sicadAinda não há avaliações
- Pure Quality Pure Natural: Calcium Carbonate Filler / MasterbatchDocumento27 páginasPure Quality Pure Natural: Calcium Carbonate Filler / MasterbatchhelenAinda não há avaliações
- Design of Helical Antennas For 433 MHZ Radio Telemetry Ground Station and Uav (Unmanned Aerial Vehicle)Documento7 páginasDesign of Helical Antennas For 433 MHZ Radio Telemetry Ground Station and Uav (Unmanned Aerial Vehicle)Tiara Nira SariAinda não há avaliações
- Impacts of DecarbonizationDocumento2 páginasImpacts of DecarbonizationCM SoongAinda não há avaliações
- School newspaper report teaches Present PerfectDocumento2 páginasSchool newspaper report teaches Present PerfectMiro MiroAinda não há avaliações
- Delhi Police ResultDocumento26 páginasDelhi Police ResultExam Aspirant100% (1)
- UNDERSTANDING CULTURE SOCIETY & POLITICS12 - LAS - Week7Documento6 páginasUNDERSTANDING CULTURE SOCIETY & POLITICS12 - LAS - Week7Bergonsolutions AingelAinda não há avaliações
- Psyclone: Rigging & Tuning GuideDocumento2 páginasPsyclone: Rigging & Tuning GuidelmagasAinda não há avaliações
- Iwwusa Final Report IdsDocumento216 páginasIwwusa Final Report IdsRituAinda não há avaliações
- Analog To Digital Conversion (ADC)Documento62 páginasAnalog To Digital Conversion (ADC)Asin PillaiAinda não há avaliações
- Atomic Structure - One Shot by Sakshi Mam #BounceBackDocumento231 páginasAtomic Structure - One Shot by Sakshi Mam #BounceBackchansiray7870Ainda não há avaliações
- Master of Advanced Nursing Practice degreeDocumento2 páginasMaster of Advanced Nursing Practice degreeAgusfian Trima PutraAinda não há avaliações
- Conditional Sentences in NT Greek Ruben VideiraDocumento62 páginasConditional Sentences in NT Greek Ruben Videiraruviso100% (1)
- Armitage Tutorial for Cyber Attack ManagementDocumento54 páginasArmitage Tutorial for Cyber Attack Managementworkmumbai3870Ainda não há avaliações
- 1ST Periodical Test ReviewDocumento16 páginas1ST Periodical Test Reviewkaren rose maximoAinda não há avaliações
- Gender and Other Cross Cutting Issues Mental HealthDocumento6 páginasGender and Other Cross Cutting Issues Mental HealthJamira Inoc SoboAinda não há avaliações
- DX DiagDocumento42 páginasDX DiagVinvin PatrimonioAinda não há avaliações