Você também pode gostar
- The Real Product Safety Guide: Reducing the Risk of Product Safety Alerts and RecallsNo EverandThe Real Product Safety Guide: Reducing the Risk of Product Safety Alerts and RecallsAinda não há avaliações
- PROFINET-system Redundancy With Sinamics and S7-1500R/H SystemDocumento28 páginasPROFINET-system Redundancy With Sinamics and S7-1500R/H SystembrunobcgAinda não há avaliações
- CompTIA CASP+ Certification The Ultimate Study Guide To Master the Advanced Security Practitioner ExamNo EverandCompTIA CASP+ Certification The Ultimate Study Guide To Master the Advanced Security Practitioner ExamAinda não há avaliações
- PROFINET-system Redundancy With SINAMICS DrivesDocumento44 páginasPROFINET-system Redundancy With SINAMICS DrivesbrunobcgAinda não há avaliações
- Controlling A Sinamics G120 Via Profisafe With A Simatic S7-1200 F-CpuDocumento35 páginasControlling A Sinamics G120 Via Profisafe With A Simatic S7-1200 F-CpuEva SuárezAinda não há avaliações
- MC PreServo and MC PostServo v10 enDocumento30 páginasMC PreServo and MC PostServo v10 enT RAinda não há avaliações
- Facility Security Principles for Non-Security PractitionersNo EverandFacility Security Principles for Non-Security PractitionersAinda não há avaliações
- Siemens Stardrive v14109743270 SINAMICS S120 TIA DOCU v10 enDocumento27 páginasSiemens Stardrive v14109743270 SINAMICS S120 TIA DOCU v10 enCarlos AlvearAinda não há avaliações
- GMP WinCC Advanced V14 enDocumento26 páginasGMP WinCC Advanced V14 enhuykhiemAinda não há avaliações
- Configure GMP-compliant WinCC in TIA PortalDocumento26 páginasConfigure GMP-compliant WinCC in TIA PortaltosukAinda não há avaliações
- SIMATIC Energy Suite V14 SP1 Visualization ExampleDocumento29 páginasSIMATIC Energy Suite V14 SP1 Visualization ExampleGERVASAinda não há avaliações
- Extended Communication G120 DOCU v10 enDocumento17 páginasExtended Communication G120 DOCU v10 enJuliet SinghAinda não há avaliações
- SIMIT ChemBasic Doc enDocumento40 páginasSIMIT ChemBasic Doc enraffaelloAinda não há avaliações
- Application To Support The Acceptance Test of The Safety Integrated Functions of Sinamics G120Documento34 páginasApplication To Support The Acceptance Test of The Safety Integrated Functions of Sinamics G120Felipe Polix BarbosaAinda não há avaliações
- Standard Application V90pn S7 1200 PositionControl DOC enDocumento43 páginasStandard Application V90pn S7 1200 PositionControl DOC enfelipezambranoAinda não há avaliações
- Connection EnS EnMPRO DOC enDocumento41 páginasConnection EnS EnMPRO DOC enAlejandro JimenezAinda não há avaliações
- Monitor machine vibration with Siemens SM 1281Documento41 páginasMonitor machine vibration with Siemens SM 1281wassimAinda não há avaliações
- SIEMENS - FTP S7-1x00 (v3.0)Documento24 páginasSIEMENS - FTP S7-1x00 (v3.0)Jorge_Andril_5370Ainda não há avaliações
- S7-1200 1500 Webserver DOC v22 enDocumento34 páginasS7-1200 1500 Webserver DOC v22 enelzion zionAinda não há avaliações
- Administracion TIA Portal WinCCDocumento50 páginasAdministracion TIA Portal WinCCAlberto LazoAinda não há avaliações
- Sinamics Speed G120 ProfinetDocumento31 páginasSinamics Speed G120 ProfinetLuis SierraAinda não há avaliações
- PCS 7 Unit Template "Stirred Tank Reactor" Using The Example of The Chemical IndustryDocumento45 páginasPCS 7 Unit Template "Stirred Tank Reactor" Using The Example of The Chemical IndustryFernandoCrespoMonAinda não há avaliações
- Pndriver V2.1 Quick Start Guide For Iot2040Documento25 páginasPndriver V2.1 Quick Start Guide For Iot2040เมธี ปทุมาสูตรAinda não há avaliações
- Get Alarm DOC V10 enDocumento20 páginasGet Alarm DOC V10 enmq6jbbbdnpAinda não há avaliações
- Digi Usecases API Doc v10 enDocumento28 páginasDigi Usecases API Doc v10 enBorisAinda não há avaliações
- Using A CP 443-1 OPC UA As Gateway For Mes/ErpDocumento47 páginasUsing A CP 443-1 OPC UA As Gateway For Mes/ErptekhakkoAinda não há avaliações
- Mobile Panel Disconnect Without Error Doc V14 enDocumento17 páginasMobile Panel Disconnect Without Error Doc V14 enplopskyAinda não há avaliações
- SIMENS PLC Hardware Support SNMP ProtocolDocumento23 páginasSIMENS PLC Hardware Support SNMP ProtocolWat SuwatAinda não há avaliações
- Logo CMR Sms Pump Doc v10 enDocumento38 páginasLogo CMR Sms Pump Doc v10 enMarco Antonio Quispe RoqueAinda não há avaliações
- SIMATIC RF200 RF180C V55 V10 enDocumento31 páginasSIMATIC RF200 RF180C V55 V10 enSagar PawarAinda não há avaliações
- F-Position DOC V20 enDocumento47 páginasF-Position DOC V20 enaliAinda não há avaliações
- Logo8-Knx Heat - Co2-Rh-fancontrol Doc enDocumento18 páginasLogo8-Knx Heat - Co2-Rh-fancontrol Doc enIsaac Aparicio RojasAinda não há avaliações
- ET200SPMS RD WR DOC V11 enDocumento33 páginasET200SPMS RD WR DOC V11 enRegis Lucio Fontoura Da SilvaAinda não há avaliações
- User Defined Diagnostics DOKU v23 enDocumento46 páginasUser Defined Diagnostics DOKU v23 enJoseMelMPAinda não há avaliações
- Positioning To Print Marks With Sinamics V90 and SIMATIC S7-1200 (TO)Documento24 páginasPositioning To Print Marks With Sinamics V90 and SIMATIC S7-1200 (TO)Jahidul IslamAinda não há avaliações
- Muting Light Curtain DOC V21 enDocumento59 páginasMuting Light Curtain DOC V21 enfcompartAinda não há avaliações
- 1097Documento28 páginas1097scscsAinda não há avaliações
- Speed Control with S7-1200 and SINAMICS V90 via PROFINETDocumento23 páginasSpeed Control with S7-1200 and SINAMICS V90 via PROFINETDavid LucioAinda não há avaliações
- LOGO! 8 Partition Wall Function for KNXDocumento16 páginasLOGO! 8 Partition Wall Function for KNXjoseAinda não há avaliações
- Feedback DOC V30 enDocumento30 páginasFeedback DOC V30 enErdincAinda não há avaliações
- VLAN DOKU V10 enDocumento38 páginasVLAN DOKU V10 enshimaa battahAinda não há avaliações
- TIA Openness GettingStartedAndDemo V14SP1 enDocumento35 páginasTIA Openness GettingStartedAndDemo V14SP1 enjoneschnAinda não há avaliações
- Light Control With LOGO! and HMI Panel: Application Example 07/2017Documento25 páginasLight Control With LOGO! and HMI Panel: Application Example 07/2017mmm aaaAinda não há avaliações
- OPC UA .NET Client for Siemens S7-1500 OPC UA ServerDocumento55 páginasOPC UA .NET Client for Siemens S7-1500 OPC UA ServerAnamaria NicăAinda não há avaliações
- Library Guideline DOC v10 en PDFDocumento79 páginasLibrary Guideline DOC v10 en PDFMai Hương VănAinda não há avaliações
- Generate P&IDs with COMOS P&IDDocumento188 páginasGenerate P&IDs with COMOS P&IDSamAinda não há avaliações
- How To Connect and Configure The Sinamics V90 Motor Brake: Product / Version / Specification / KeywordDocumento14 páginasHow To Connect and Configure The Sinamics V90 Motor Brake: Product / Version / Specification / KeyworddiegoAinda não há avaliações
- WinCC TimeSynDocumento57 páginasWinCC TimeSynHBNBILAinda não há avaliações
- Secure VPN Into PC and LOGO 8 (En)Documento22 páginasSecure VPN Into PC and LOGO 8 (En)Jorge_Andril_5370Ainda não há avaliações
- Configuration Information For The 2nd-Generation Mobile PanelsDocumento9 páginasConfiguration Information For The 2nd-Generation Mobile PanelsRonaldo TorquatiAinda não há avaliações
- SpeedControl V90 S7-1500 DOC enDocumento36 páginasSpeedControl V90 S7-1500 DOC enLuciano Cardoso VasconcelosAinda não há avaliações
- OpennessScripter Intro DOC V114 enDocumento18 páginasOpennessScripter Intro DOC V114 enRafael DavidAinda não há avaliações
- Wiring Voting AI V30 enDocumento138 páginasWiring Voting AI V30 entuandanhbk10Ainda não há avaliações
- Display SINAMICS Error Messages in HMIDocumento30 páginasDisplay SINAMICS Error Messages in HMIBagus Dwi PermanaAinda não há avaliações
- Programming-Guideline-Safety DOC V1 1 en TIAv14sp1Documento39 páginasProgramming-Guideline-Safety DOC V1 1 en TIAv14sp1Marian ChobodaAinda não há avaliações
- Library for Modbus RTU (LMRTUDocumento33 páginasLibrary for Modbus RTU (LMRTUАлександр ШкодаAinda não há avaliações
- Remote Access To Simatic Hmi Operator Panels: Sm@RtserverDocumento28 páginasRemote Access To Simatic Hmi Operator Panels: Sm@RtserverBlažević JosipAinda não há avaliações
- Installation IS PH enDocumento117 páginasInstallation IS PH enBruno BertottiAinda não há avaliações
- VLQDPLFV: Getting Started 06/2005 EditionDocumento93 páginasVLQDPLFV: Getting Started 06/2005 EditionIng Capriel CaprielAinda não há avaliações
- Iasimp Qs005 en PDocumento200 páginasIasimp Qs005 en PIng Capriel CaprielAinda não há avaliações
- 2012-10 - Industrial Ethernet - CP 343-1 LeanDocumento68 páginas2012-10 - Industrial Ethernet - CP 343-1 LeanAbez FiveAinda não há avaliações
- Readme en PDFDocumento10 páginasReadme en PDFIng Capriel CaprielAinda não há avaliações
- PCS7 Standard Architectures V8.0 SP1 - Sep 13Documento254 páginasPCS7 Standard Architectures V8.0 SP1 - Sep 13Ing Capriel CaprielAinda não há avaliações
- Sinamics S120 TuningDocumento36 páginasSinamics S120 TuningIng Capriel CaprielAinda não há avaliações
- Sinamics s120 DP at s7-300400f Docu v1d1 enDocumento81 páginasSinamics s120 DP at s7-300400f Docu v1d1 enIng Capriel CaprielAinda não há avaliações
- 317T GS SINAMICS S120 e PDFDocumento84 páginas317T GS SINAMICS S120 e PDFIng Capriel CaprielAinda não há avaliações
- SIEMENS - G120 - C - D, G110M Safety Function ManualDocumento450 páginasSIEMENS - G120 - C - D, G110M Safety Function ManualIng Capriel CaprielAinda não há avaliações
- Siemens Basics of AC DrivesDocumento116 páginasSiemens Basics of AC DrivesSleman ShackoorAinda não há avaliações
- Siemens G120Documento26 páginasSiemens G120kk_kamalakkannanAinda não há avaliações
- Simatic Sinamics Profinet Irt v2 0 enDocumento47 páginasSimatic Sinamics Profinet Irt v2 0 enIng Capriel CaprielAinda não há avaliações
- Function Manual Basic Positioner en-USDocumento92 páginasFunction Manual Basic Positioner en-USIng Capriel CaprielAinda não há avaliações
- Safety At015b en P Guardlogix Controller To KinetixDocumento30 páginasSafety At015b en P Guardlogix Controller To KinetixIng Capriel CaprielAinda não há avaliações
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- SIEMENS - G120 - C - D, G110M Safety Function ManualDocumento450 páginasSIEMENS - G120 - C - D, G110M Safety Function ManualIng Capriel CaprielAinda não há avaliações
- Siemens - g120 Cu250s-2 List ManualDocumento1.242 páginasSiemens - g120 Cu250s-2 List ManualIng Capriel Capriel100% (2)
- SIEMENS - G120 PM240-2 - HIM Hardware Install ManualDocumento132 páginasSIEMENS - G120 PM240-2 - HIM Hardware Install ManualIng Capriel CaprielAinda não há avaliações
- s7300 Fm350 2 Operating Instructions en en-USDocumento160 páginass7300 Fm350 2 Operating Instructions en en-USBarış Cem YamenAinda não há avaliações
- PN Bacnet Link Operating Instructions en-USDocumento96 páginasPN Bacnet Link Operating Instructions en-USIng Capriel CaprielAinda não há avaliações
- SIEMENS - G120 CU250S-2 Operating InstructionsDocumento522 páginasSIEMENS - G120 CU250S-2 Operating InstructionsIng Capriel CaprielAinda não há avaliações
- Serial Communication: User's Manual QJ71C24N, QJ71C24N-R2 QJ71C24N-R4 QJ71C24, QJ71C24-R2Documento24 páginasSerial Communication: User's Manual QJ71C24N, QJ71C24N-R2 QJ71C24N-R4 QJ71C24, QJ71C24-R2Ing Capriel CaprielAinda não há avaliações
- TN972 Migrating The Galaxy To ArchestrA System Platform 2012 R2 Application Server 3.6Documento13 páginasTN972 Migrating The Galaxy To ArchestrA System Platform 2012 R2 Application Server 3.6Ing Capriel CaprielAinda não há avaliações
- Sinamics s120 Und Technologie-Cpu v2 0-Sp1 eDocumento58 páginasSinamics s120 Und Technologie-Cpu v2 0-Sp1 eIng Capriel CaprielAinda não há avaliações
- Modiconm 340 UsingunityprosarchitecturesandcommunicationservicesreferencemanualDocumento86 páginasModiconm 340 UsingunityprosarchitecturesandcommunicationservicesreferencemanualIng Capriel CaprielAinda não há avaliações
- Communication Between Modbus TCP SIMATIC S7 and Modicon M340Documento89 páginasCommunication Between Modbus TCP SIMATIC S7 and Modicon M340ozgendevecioglu1840Ainda não há avaliações
- Lecture Notes 1 MOBILE NETWORKS 1 NOWDocumento13 páginasLecture Notes 1 MOBILE NETWORKS 1 NOWNorris Nana ChinjongAinda não há avaliações
- C&I in Water Treatment PlantsDocumento28 páginasC&I in Water Treatment PlantsSunil PanchalAinda não há avaliações
- Stored Energy in CapacitorsDocumento25 páginasStored Energy in CapacitorsJennifer MagangoAinda não há avaliações
- ARM Interrupt ProcessingDocumento33 páginasARM Interrupt Processinglovet essampongAinda não há avaliações
- TS Connection 2203NE1 PDFDocumento1.266 páginasTS Connection 2203NE1 PDFAtiqur Rahman AtiqAinda não há avaliações
- Overview of Power Integrity Solutions On Package and PCB: Decoupling and EBG IsolationDocumento39 páginasOverview of Power Integrity Solutions On Package and PCB: Decoupling and EBG IsolationIsmaiel KaladiAinda não há avaliações
- Aquasnap Product Data 30RA 3PDDocumento48 páginasAquasnap Product Data 30RA 3PDYocxan Josue Aguilar OviedoAinda não há avaliações
- Kempomat: EN FI SV NO DA DE NL FR ES PL RUDocumento26 páginasKempomat: EN FI SV NO DA DE NL FR ES PL RUmcombaleAinda não há avaliações
- Cadence Design Tools TutorialDocumento124 páginasCadence Design Tools TutorialBhupender KumawatAinda não há avaliações
- Wireless Charging of Electric Vehicles Using Dual Spiral Coil Magnetic Resonant CouplingDocumento6 páginasWireless Charging of Electric Vehicles Using Dual Spiral Coil Magnetic Resonant CouplingIJRASETPublicationsAinda não há avaliações
- Demag DR Rope Hoist: Without Electrical ControlDocumento32 páginasDemag DR Rope Hoist: Without Electrical ControlDante WilliamsAinda não há avaliações
- Module 4 Sheet 1.1 OHS PoliciesDocumento23 páginasModule 4 Sheet 1.1 OHS PoliciesRalfh De GuzmanAinda não há avaliações
- Logic Circuit Design Lab Manual1 - 2 PDFDocumento61 páginasLogic Circuit Design Lab Manual1 - 2 PDFAkhil Kumar SAinda não há avaliações
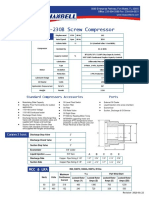
- Hanbell Spec Sheet RC2-230B PDFDocumento1 páginaHanbell Spec Sheet RC2-230B PDFDaniel Naoe FestinAinda não há avaliações
- Services HarshitaDocumento1 páginaServices HarshitaMs.Muskaan JainAinda não há avaliações
- Hydraulic Excavator PC200-8 PC200LC-8 PC220-8 PC220LC-8: 90 Diagrams and DrawingsDocumento5 páginasHydraulic Excavator PC200-8 PC200LC-8 PC220-8 PC220LC-8: 90 Diagrams and Drawingsari100% (3)
- Catalogue Onkyo 2014-2015Documento10 páginasCatalogue Onkyo 2014-2015Thawatchai PirapongsilAinda não há avaliações
- Service Manual A3300M ....Documento59 páginasService Manual A3300M ....QooAinda não há avaliações
- TSS92 M210410EN D User S Guide 242996Documento104 páginasTSS92 M210410EN D User S Guide 242996alvaroAinda não há avaliações
- Lecture11 EE101A W16Documento13 páginasLecture11 EE101A W16ankitgoyal100Ainda não há avaliações
- Mentum Ellipse Vs Pathloss 4.0 Link Analysis: Reviewby Hudha Ju L 1 5Documento10 páginasMentum Ellipse Vs Pathloss 4.0 Link Analysis: Reviewby Hudha Ju L 1 5homaAinda não há avaliações
- Facade LightingDocumento11 páginasFacade LightingsasikalaAinda não há avaliações
- Reverse Engineering Power Management On NVIDIADocumento9 páginasReverse Engineering Power Management On NVIDIALeofodãoAinda não há avaliações
- 74738Documento12 páginas74738sontuyet82Ainda não há avaliações
- Safety SwitchesDocumento56 páginasSafety SwitchesaglegarteAinda não há avaliações
- RV4 65B R5 V2 Product SpecificationDocumento5 páginasRV4 65B R5 V2 Product SpecificationMario Alvarez GarciaAinda não há avaliações
- Pressure TransmitterDocumento66 páginasPressure Transmittersswahyudi100% (1)
- nx-877 Pic16f887 Experiment Board PDFDocumento8 páginasnx-877 Pic16f887 Experiment Board PDFfren9123Ainda não há avaliações
- Intel® Desktop Board D525MW Product Guide: Order Number: E95576-001Documento64 páginasIntel® Desktop Board D525MW Product Guide: Order Number: E95576-001Arcangelo Di BattistaAinda não há avaliações
- Dual Frequency Desalter No Load TestDocumento3 páginasDual Frequency Desalter No Load TestYusmin JusohAinda não há avaliações