Você também pode gostar
- S 1506 pcc1301 - PortDocumento10 páginasS 1506 pcc1301 - PortAlberto AraripeAinda não há avaliações
- Implementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoNo EverandImplementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoAinda não há avaliações
- Instalação e operação do controlador K30SLVDocumento48 páginasInstalação e operação do controlador K30SLVRodrigo GeraAinda não há avaliações
- K90Master Manual PDFDocumento20 páginasK90Master Manual PDFRodrigoChavesAinda não há avaliações
- Manual Gerador Stamford 2Documento72 páginasManual Gerador Stamford 2Lucas Nize DoreaAinda não há avaliações
- AGC 200 Operators Manual 4189340607 BR PDFDocumento20 páginasAGC 200 Operators Manual 4189340607 BR PDFCaua Dias Dos SantosAinda não há avaliações
- Manual Top One 2.00 Rev. 04Documento40 páginasManual Top One 2.00 Rev. 04Carlos Santos100% (1)
- Instruções de Funcionamento DS Series 7000Documento21 páginasInstruções de Funcionamento DS Series 7000silviopc67% (3)
- Sistema de supervisão CADocumento80 páginasSistema de supervisão CARicardo Nunes Pereira Junior100% (1)
- Grupo Geradores - Sistemas de ControleDocumento20 páginasGrupo Geradores - Sistemas de ControleGPrado0% (1)
- Controlador ST2160 tabela comunicação ModbusDocumento42 páginasControlador ST2160 tabela comunicação ModbusEduardo Marcelo SilveiraAinda não há avaliações
- Atualização versão ST2060/80/90Documento14 páginasAtualização versão ST2060/80/90Claudesson Nascimento RodriguesAinda não há avaliações
- Manual K30XL 300 Rev. 02Documento39 páginasManual K30XL 300 Rev. 02Mário BassoliAinda não há avaliações
- Pt26241a - Manual Gcp-2245lsxDocumento112 páginasPt26241a - Manual Gcp-2245lsxRuben Marcos Alava Pico50% (2)
- Usca Manual StrazmaqDocumento29 páginasUsca Manual StrazmaqwtkubotaAinda não há avaliações
- Manual Consulta SDG514Documento6 páginasManual Consulta SDG514Gian Gabriel dos Santos Homem100% (1)
- Agc 150 Installation Instructions 4189341185 BRDocumento26 páginasAgc 150 Installation Instructions 4189341185 BRReuber Felipi Fernandes100% (1)
- WEG CWM 50051271 Catalogo PTDocumento56 páginasWEG CWM 50051271 Catalogo PTjonasaswAinda não há avaliações
- Documentação e manuais do controlador ML-2Documento105 páginasDocumentação e manuais do controlador ML-2Efrain Almarazherrera100% (2)
- Manual Reguladores de VelocidadeDocumento11 páginasManual Reguladores de VelocidadeMatheus Caus100% (2)
- Manual K30 XT7.20 XTe8.10 Rev. 02Documento44 páginasManual K30 XT7.20 XTe8.10 Rev. 02Ricardo NunesAinda não há avaliações
- FG WilsonDocumento3 páginasFG WilsonLuciano Pereira100% (2)
- 700 USER PortugueseDocumento197 páginas700 USER PortugueseRafael FernandoAinda não há avaliações
- Manual Técnico para Grupo Gerador E Quadro de Comando Automático Usca E30 para Transferência IninterruptaDocumento12 páginasManual Técnico para Grupo Gerador E Quadro de Comando Automático Usca E30 para Transferência IninterruptaRogério LovattoAinda não há avaliações
- Lista de Alarmes e Parâmetros AGC4Documento205 páginasLista de Alarmes e Parâmetros AGC4Ricardo Nunes Pereira Junior100% (1)
- IL-NT AMF25 TreinamentoDocumento188 páginasIL-NT AMF25 TreinamentoJVV ENGENHARIAAinda não há avaliações
- Regulador eletrônico de velocidadeDocumento24 páginasRegulador eletrônico de velocidadeDarlan SilvaAinda não há avaliações
- Manual de Instruções QTA - Comutação Automática de Fontes de EnergiaDocumento40 páginasManual de Instruções QTA - Comutação Automática de Fontes de EnergiavandeAinda não há avaliações
- Manual de instruções para controlador NT935Documento30 páginasManual de instruções para controlador NT935edimarAinda não há avaliações
- Lamina Comercial Diesel 50Hz PT MWM - Serie TDocumento2 páginasLamina Comercial Diesel 50Hz PT MWM - Serie Tgiant360Ainda não há avaliações
- Motor T4 ABBDocumento2 páginasMotor T4 ABBdesportista_luisAinda não há avaliações
- Configuração e uso do regulador de velocidade digital EDG5500Documento8 páginasConfiguração e uso do regulador de velocidade digital EDG5500GilbertoAinda não há avaliações
- Lamina Comercial Diesel 50Hz PT Cummins - Serie QDocumento2 páginasLamina Comercial Diesel 50Hz PT Cummins - Serie Qgiant360Ainda não há avaliações
- Instruções de Funcionamento USCA ST2140Documento150 páginasInstruções de Funcionamento USCA ST2140Pierry Silva100% (4)
- K38L Versão1410 PDFDocumento20 páginasK38L Versão1410 PDFHelder Dos SantosAinda não há avaliações
- Chave MagneticaDocumento1 páginaChave Magneticahudson100% (1)
- SACE Emax 2 - Catálogo TécnicoDocumento300 páginasSACE Emax 2 - Catálogo TécnicoVaroliver100% (1)
- Treinamento IL-NT-AMF25 v2.0Documento60 páginasTreinamento IL-NT-AMF25 v2.0Sandro Muniz SouzaAinda não há avaliações
- Filtros NaganoDocumento3 páginasFiltros Naganonandomir1981100% (1)
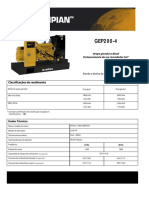
- GEP200Documento4 páginasGEP200ricardobarreto10Ainda não há avaliações
- Manual Alternador - Gerador de EnergiaDocumento43 páginasManual Alternador - Gerador de EnergiaGustavo AmorasAinda não há avaliações
- Controlador microprocessado para gerador AMFDocumento4 páginasControlador microprocessado para gerador AMFGustavo PereiraAinda não há avaliações
- Grupo Gerador Diesel StandbyDocumento2 páginasGrupo Gerador Diesel StandbyThiago AraújoAinda não há avaliações
- DSE8660 Operators ManualDocumento76 páginasDSE8660 Operators ManualRobertoSoares100% (1)
- Analisador de Energia RE6000 Guia do UsuárioDocumento136 páginasAnalisador de Energia RE6000 Guia do UsuáriotiagoorgadoAinda não há avaliações
- Tabela Alarme ST2080 v110Documento7 páginasTabela Alarme ST2080 v110BJNE01Ainda não há avaliações
- Especificações técnicas gerador 40KVADocumento1 páginaEspecificações técnicas gerador 40KVAWellingtonFonsecaAinda não há avaliações
- Diagrama Gerador 01Documento13 páginasDiagrama Gerador 01Joao VictorAinda não há avaliações
- Man 670.060.0140 V100Documento303 páginasMan 670.060.0140 V100Carlosh5100% (1)
- Grupo Motor Gerador Aula 01.2011Documento42 páginasGrupo Motor Gerador Aula 01.2011Rafael RochaAinda não há avaliações
- Procedimentos de manutenção para alternadores WEG GTA e AG10Documento43 páginasProcedimentos de manutenção para alternadores WEG GTA e AG10Daiane Mendes100% (1)
- Gerador Diesel 60-50Hz até 115kVADocumento2 páginasGerador Diesel 60-50Hz até 115kVAPablo VallejosAinda não há avaliações
- DKG 307 PortuguesDocumento54 páginasDKG 307 PortuguesFredKemil100% (2)
- InteliGen 200 Operator Guide PORDocumento35 páginasInteliGen 200 Operator Guide PORSOS100% (1)
- Comissionamento de Entradas e Saídas Externas BináriasDocumento20 páginasComissionamento de Entradas e Saídas Externas BináriasRicardo Nunes Pereira JuniorAinda não há avaliações
- Manual Comap AMF25 PDFDocumento52 páginasManual Comap AMF25 PDFSquallsLaAinda não há avaliações
- Comandos ElétricosNo EverandComandos ElétricosAinda não há avaliações
- Caderno de Atividades Pratica de Leitura e Producao de Textos 6o Ao 9o Ano PDFDocumento482 páginasCaderno de Atividades Pratica de Leitura e Producao de Textos 6o Ao 9o Ano PDFJaime Igor Viegas100% (2)
- 2014 8ano 3bim Gramatica PDFDocumento18 páginas2014 8ano 3bim Gramatica PDFJaime Igor ViegasAinda não há avaliações
- Motor Perkins Série 1000Documento64 páginasMotor Perkins Série 1000JB01091982100% (8)
- Banner Segurança PDFDocumento1 páginaBanner Segurança PDFJaime Igor ViegasAinda não há avaliações
- Conexões entre Matemática e Outros Campos do ConhecimentoDocumento4 páginasConexões entre Matemática e Outros Campos do ConhecimentoJaime Igor ViegasAinda não há avaliações
- SIST COMBUSTIVEL-geradoresDocumento48 páginasSIST COMBUSTIVEL-geradoresJaime Igor Viegas100% (2)
- Motor 9L 5 cilindros ScaniaDocumento68 páginasMotor 9L 5 cilindros ScaniaJaime Igor Viegas100% (3)
- Motor 9L 5 cilindros ScaniaDocumento68 páginasMotor 9L 5 cilindros ScaniaJaime Igor Viegas100% (3)
- Manual Do Motor Scania d16Documento160 páginasManual Do Motor Scania d16TucunareFish100% (5)
- EMS SDocumento24 páginasEMS SJaime Igor Viegas100% (8)
- NEWAplicação Da Arquitetura SOA em Sistemas Embarcados para IoTDocumento6 páginasNEWAplicação Da Arquitetura SOA em Sistemas Embarcados para IoTJaime Igor ViegasAinda não há avaliações
- Segurança no trabalho: atitude e responsabilidadeDocumento1 páginaSegurança no trabalho: atitude e responsabilidadeJaime Igor ViegasAinda não há avaliações
- Aquisição e tratamento de dados IoTDocumento2 páginasAquisição e tratamento de dados IoTJaime Igor ViegasAinda não há avaliações
- Pibiti RF PDFDocumento23 páginasPibiti RF PDFJaime Igor ViegasAinda não há avaliações
- Programa e TreinamentosDocumento12 páginasPrograma e TreinamentosleokdAinda não há avaliações
- Metodo de Tres Momentos PDFDocumento2 páginasMetodo de Tres Momentos PDFBenjamin C. LauraAinda não há avaliações
- Grupo Motor Gerador Aula 02.2011.2 DiminuidoDocumento59 páginasGrupo Motor Gerador Aula 02.2011.2 DiminuidoJaime Igor Viegas100% (1)
- Gerenciamento de Projetos - Fabrica de ChuveirosDocumento18 páginasGerenciamento de Projetos - Fabrica de ChuveirosJaime Igor ViegasAinda não há avaliações
- 2015 GSA Atividade PlanilhadePlanejamento - CulturaDocumento4 páginas2015 GSA Atividade PlanilhadePlanejamento - CulturaJaime Igor ViegasAinda não há avaliações
- Relatorio 2017-Controle de Acesso MicrocontroladoDocumento4 páginasRelatorio 2017-Controle de Acesso MicrocontroladoJaime Igor ViegasAinda não há avaliações
- Cinemática dos SólidosDocumento28 páginasCinemática dos SólidosJaime Igor ViegasAinda não há avaliações
- Lista 1 - 1S2018Documento3 páginasLista 1 - 1S2018Jaime Igor ViegasAinda não há avaliações
- Gabarito Lista 2 2S2017Documento1 páginaGabarito Lista 2 2S2017Jaime Igor ViegasAinda não há avaliações
- Exercícios Do Segundo Bimestre de 2016 de Mecânica Dos Sólidos UsfDocumento16 páginasExercícios Do Segundo Bimestre de 2016 de Mecânica Dos Sólidos UsfJaime Igor ViegasAinda não há avaliações
- UNIVERSIDADE SÃO FRANCISCO - Lista de Exercícios para N2 - Engenharia ElétricaDocumento2 páginasUNIVERSIDADE SÃO FRANCISCO - Lista de Exercícios para N2 - Engenharia ElétricaJaime Igor ViegasAinda não há avaliações
- Diagrama Unifilar Sup Antonelli - Amparo - ParecerDocumento1 páginaDiagrama Unifilar Sup Antonelli - Amparo - ParecerJaime Igor ViegasAinda não há avaliações
- Contrato de manutenção preventiva em grupos geradoresDocumento7 páginasContrato de manutenção preventiva em grupos geradoresJaime Igor ViegasAinda não há avaliações
- Peugeot 206 fusíveisDocumento2 páginasPeugeot 206 fusíveisJaime Igor Viegas83% (6)
- Manual DASN-Simei 2013 PDFDocumento14 páginasManual DASN-Simei 2013 PDFjoadloAinda não há avaliações
- Equações Diferenciais de Segunda OrdemDocumento2 páginasEquações Diferenciais de Segunda OrdemDiego CabralAinda não há avaliações
- Bomba Ferrari - AAB1030027Documento2 páginasBomba Ferrari - AAB1030027gambetzAinda não há avaliações
- Fluidos 2 - Teorico - Respostas VistoDocumento10 páginasFluidos 2 - Teorico - Respostas VistoFilipa RochaAinda não há avaliações
- Cálculo Estrutural +elementos EstruturaisDocumento11 páginasCálculo Estrutural +elementos EstruturaisKlebersonRamosAinda não há avaliações
- Calculo SecadorDocumento1 páginaCalculo SecadorbarrosojmsAinda não há avaliações
- Alchemia RPG - Os Cavaleiros Do Zodíaco - Biblioteca ÉlficaDocumento23 páginasAlchemia RPG - Os Cavaleiros Do Zodíaco - Biblioteca ÉlficaJean NevesAinda não há avaliações
- Transmissão de Energia I (Projeto Eletrico)Documento164 páginasTransmissão de Energia I (Projeto Eletrico)FINIZOLA64100% (2)
- WEG Instrucoes para Instalacao Operacao e Manutencao Do Motofreio 50021505 Manual Portugues BRDocumento2 páginasWEG Instrucoes para Instalacao Operacao e Manutencao Do Motofreio 50021505 Manual Portugues BRpaulo2604Ainda não há avaliações
- Operação de equipamentos em subestações 34,5/13,8 kVDocumento64 páginasOperação de equipamentos em subestações 34,5/13,8 kVjorgecoanAinda não há avaliações
- Lista de Exercícios PDFDocumento1 páginaLista de Exercícios PDFLucas CoutinhoAinda não há avaliações
- Corpos em arte, uma odisseia da pesquisa corporalDocumento282 páginasCorpos em arte, uma odisseia da pesquisa corporalAndrea Portela100% (1)
- NBR 5748 - Analise Quimica de Cimento Portland - Determinacao de Oxido de Calcio LivreDocumento3 páginasNBR 5748 - Analise Quimica de Cimento Portland - Determinacao de Oxido de Calcio LivreLuiz Carlos HovsepianAinda não há avaliações
- STM microscópio tunelamentoDocumento13 páginasSTM microscópio tunelamentocesarcaldartAinda não há avaliações
- Atividades Praticas Da 22 Oba de 2019Documento3 páginasAtividades Praticas Da 22 Oba de 2019Filipe Alves100% (1)
- ACOPLAMENTOS ELÁSTICOS MADEFLEX MDDocumento5 páginasACOPLAMENTOS ELÁSTICOS MADEFLEX MDEduardo LopesAinda não há avaliações
- Processo de lodos ativados: fundamentos e variantesDocumento123 páginasProcesso de lodos ativados: fundamentos e variantesMárlon Palmeira100% (2)
- Aula 1 - O Traçado de Uma EstradaDocumento36 páginasAula 1 - O Traçado de Uma EstradaIdo ManoelAinda não há avaliações
- Processo de fundiçãoDocumento70 páginasProcesso de fundiçãoThiago O PontesAinda não há avaliações
- Condução Elétrica Nos SólidosDocumento13 páginasCondução Elétrica Nos SólidosGabriel Dezordi TeixeiraAinda não há avaliações
- Noções sobre bombasDocumento296 páginasNoções sobre bombasEmanueleFaria100% (5)
- 3504ADocumento95 páginas3504ALuis Manuel Santos100% (3)
- Exercícios resolvidos de trabalho e potênciaDocumento5 páginasExercícios resolvidos de trabalho e potênciaRicardo AraujoAinda não há avaliações
- Teoria Da Elasticidade - Exercícios Problemas 2D em Coordenadas RetangularesDocumento3 páginasTeoria Da Elasticidade - Exercícios Problemas 2D em Coordenadas RetangularesThiago PasqualAinda não há avaliações
- Conjunto para Estudo de Geração, Transmissão e Distribuição de Energia ElétricaDocumento47 páginasConjunto para Estudo de Geração, Transmissão e Distribuição de Energia ElétricaCaio de MoraesAinda não há avaliações
- Instalacion Generador HeimerDocumento23 páginasInstalacion Generador HeimerHember Ticona0% (1)
- Trabalho de Fisica, UniversoDocumento48 páginasTrabalho de Fisica, UniversoJhonatanAinda não há avaliações
- Lista de Exercícios Prova de Recuperação – FísicaDocumento2 páginasLista de Exercícios Prova de Recuperação – FísicaElson GuerraAinda não há avaliações
- Controle de Processos QuimicosDocumento175 páginasControle de Processos QuimicosJocirlei FelicioAinda não há avaliações
- Introdução à Análise Química por VolumetriaDocumento14 páginasIntrodução à Análise Química por VolumetriaBruno PiresAinda não há avaliações
- VGA Lista 2Documento3 páginasVGA Lista 2José SilasAinda não há avaliações