Você também pode gostar
- Importancia de la arquitectura de Von NeumannDocumento6 páginasImportancia de la arquitectura de Von NeumannJhosmar Antoni Espinoza SanjinezAinda não há avaliações
- Repaso cableado redDocumento5 páginasRepaso cableado redZzack Llanque RodrigezAinda não há avaliações
- AUTORIZACIÓ paseo 2023 (1)Documento1 páginaAUTORIZACIÓ paseo 2023 (1)william BlancoAinda não há avaliações
- Elsi AbigailDocumento1 páginaElsi Abigailwilliam BlancoAinda não há avaliações
- 1. RD QUE APRUEBA EL CUADRO DE LOS CINCO PRIMEROS PUESTOS (1)Documento2 páginas1. RD QUE APRUEBA EL CUADRO DE LOS CINCO PRIMEROS PUESTOS (1)william BlancoAinda não há avaliações
- Salud Pública y EpidemiologíaDocumento5 páginasSalud Pública y Epidemiologíawilliam BlancoAinda não há avaliações
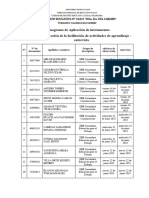
- Cronograma de Aplicación de instrumentosDocumento2 páginasCronograma de Aplicación de instrumentoswilliam BlancoAinda não há avaliações
- Anexo 1 Contrato de Servicio Docente 2020Documento2 páginasAnexo 1 Contrato de Servicio Docente 2020jhon100% (3)
- 3. CREDENCIAL TERCIO SUPERIOR (1)Documento1 página3. CREDENCIAL TERCIO SUPERIOR (1)william BlancoAinda não há avaliações
- Salud Pública y EpidemiologíaDocumento5 páginasSalud Pública y Epidemiologíawilliam BlancoAinda não há avaliações
- Anexo 1 Contrato de Servicio Docente 2020Documento2 páginasAnexo 1 Contrato de Servicio Docente 2020jhon100% (3)
- Anexo 1 Contrato de Servicio Docente 2020Documento2 páginasAnexo 1 Contrato de Servicio Docente 2020jhon100% (3)
- Informe TDocumento21 páginasInforme Twilliam BlancoAinda não há avaliações
- Imagenes Radiograficas123Documento29 páginasImagenes Radiograficas123william BlancoAinda não há avaliações
- Resultados LaboDocumento14 páginasResultados Labowilliam BlancoAinda não há avaliações
- Proyecto Clinico Brayan Denilzon Alvino TorresDocumento10 páginasProyecto Clinico Brayan Denilzon Alvino Torreswilliam BlancoAinda não há avaliações
- Practica 1 Quimica: Reconocimiento Proteinas: AlcalinoDocumento10 páginasPractica 1 Quimica: Reconocimiento Proteinas: AlcalinoWilliam Blanco ArzapaloAinda não há avaliações
- Practica 1 Quimica: Reconocimiento Proteinas: AlcalinoDocumento10 páginasPractica 1 Quimica: Reconocimiento Proteinas: AlcalinoWilliam Blanco ArzapaloAinda não há avaliações
- Fibras Ópticas OttoDocumento34 páginasFibras Ópticas OttoRicardo Marquez marquez colinaAinda não há avaliações
- Estructura de Planta Externa AveriasDocumento3 páginasEstructura de Planta Externa AveriasanimediahnAinda não há avaliações
- Amplificador Emisor Común BJT Con Resistencia de EmisorDocumento2 páginasAmplificador Emisor Común BJT Con Resistencia de EmisorPabloABAinda não há avaliações
- Tutorial de MultisimDocumento38 páginasTutorial de MultisimJose Carlos VelardeAinda não há avaliações
- Examen Final 20-1 AnalógicasDocumento23 páginasExamen Final 20-1 Analógicasmedaculo morenoAinda não há avaliações
- Antena MonopoloDocumento4 páginasAntena MonopoloAnonymous sF0mwVCNAinda não há avaliações
- Causa y EfectoDocumento6 páginasCausa y Efectoandres otalvaroAinda não há avaliações
- Tecnología ATMDocumento9 páginasTecnología ATMDavid PerezAinda não há avaliações
- Taller PreamplificadoresDocumento7 páginasTaller PreamplificadoresMichelle WakenAinda não há avaliações
- Medidas RendimientoDocumento8 páginasMedidas RendimientoFelipe Rosero PoloAinda não há avaliações
- FT Line-EDS-Cloud ESDocumento3 páginasFT Line-EDS-Cloud ESRamonNCardonaAinda não há avaliações
- SEGUNDO Informe de Fisica IIIDocumento37 páginasSEGUNDO Informe de Fisica IIIcorpses88100% (2)
- JOYODocumento14 páginasJOYOhoaibao2539Ainda não há avaliações
- Manual de Procedimiento Ensamble de Equipo de ComputoDocumento6 páginasManual de Procedimiento Ensamble de Equipo de ComputoOscar Andres Ortiz GarciaAinda não há avaliações
- III-c-electrónica y Circ DigDocumento9 páginasIII-c-electrónica y Circ DigA LE (EL DJ DEL MOMENTO)Ainda não há avaliações
- CS3Documento58 páginasCS3tAinda não há avaliações
- Laboratorio de Control Ii Diagrama de Bode, Nyquist y NicholsDocumento20 páginasLaboratorio de Control Ii Diagrama de Bode, Nyquist y Nicholsrosario arenas dionicioAinda não há avaliações
- Informe Semanal N°3 - TeoriaDocumento8 páginasInforme Semanal N°3 - TeoriaFernando Castillo perezAinda não há avaliações
- Practica 5 - Quinto Lopez JesusDocumento6 páginasPractica 5 - Quinto Lopez JesusJESUS QUINTO LOPEZAinda não há avaliações
- Guia Automatismo BasicoDocumento119 páginasGuia Automatismo BasicoalanAinda não há avaliações
- T.0502 IsDocumento7 páginasT.0502 IsSoy gilipollas yAinda não há avaliações
- DATASHEETDocumento5 páginasDATASHEETCarol HuaytaAinda não há avaliações
- MonitoresDocumento7 páginasMonitoresMartin MateosAinda não há avaliações
- HOJA DE VIDA EQUIPOS22dic2Documento67 páginasHOJA DE VIDA EQUIPOS22dic2BRYAN BAUTISTAAinda não há avaliações
- Manual Audifonos XiaomiDocumento12 páginasManual Audifonos XiaomiDanger UchihaAinda não há avaliações
- Ictv03 Te1 3Documento2 páginasIctv03 Te1 3TxoskeSarasketaOsaAinda não há avaliações
- Fuente de Voltaje RegulableDocumento13 páginasFuente de Voltaje RegulableoscarAinda não há avaliações
- Laboratorio 2 - Circuitos Con DiodosDocumento4 páginasLaboratorio 2 - Circuitos Con DiodosAlonso FuentesAinda não há avaliações