Você também pode gostar
- P2 MicroDocumento14 páginasP2 MicroSergio Antonio Gallegos AlvaradoAinda não há avaliações
- Reloj DigitalDocumento25 páginasReloj DigitalEdgar Segales VillcaAinda não há avaliações
- Teclado MatricialDocumento4 páginasTeclado MatricialNestor GuillenAinda não há avaliações
- Ejemplos Pic SimulatorDocumento19 páginasEjemplos Pic SimulatorDaniel GarciaAinda não há avaliações
- Curso Intensivo de Programación de Microcontroladores NIPLEDocumento5 páginasCurso Intensivo de Programación de Microcontroladores NIPLEchemist_17_18Ainda não há avaliações
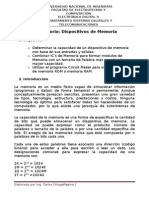
- Laboratorio - MemoriasDocumento6 páginasLaboratorio - MemoriasManolo Camilo Ortega CondegaAinda não há avaliações
- Lab 4 ADCDocumento6 páginasLab 4 ADCManolo Camilo Ortega CondegaAinda não há avaliações
- Codigo Teclado MatricialDocumento5 páginasCodigo Teclado MatricialAndres MolinaAinda não há avaliações
- Resolviendo Sistemas de Ecuaciones Lineales Por Medio de GráficasDocumento6 páginasResolviendo Sistemas de Ecuaciones Lineales Por Medio de GráficasCarlos Augusto Sabino CañizaresAinda não há avaliações
- Análisis de Un Teclado MatricialDocumento4 páginasAnálisis de Un Teclado MatricialMario M̶a̶r̶t̶í̶n̶e̶z̶ G̶a̶r̶c̶í̶a̶Ainda não há avaliações
- Historia de La Computadora Clase LogaritmosDocumento11 páginasHistoria de La Computadora Clase LogaritmosAntonio Castillo NevarakAinda não há avaliações
- Memorias Del PicDocumento6 páginasMemorias Del PicHector Sandoval MonzonAinda não há avaliações
- Sensor de ToqueDocumento3 páginasSensor de ToqueOptimusTronic100% (3)
- SonografiaDocumento38 páginasSonografiahugo_rgz92Ainda não há avaliações
- Tecnologia PCB MulticapaDocumento4 páginasTecnologia PCB MulticapacarlcoxAinda não há avaliações
- Los Formatos de Datos ENDIANNESSDocumento2 páginasLos Formatos de Datos ENDIANNESSErik SoonAinda não há avaliações
- Unidad Bio Electronic A Del Ser HumanoDocumento52 páginasUnidad Bio Electronic A Del Ser Humanobadang85Ainda não há avaliações
- Qué Es y Cómo Funciona Un Regulador de GasDocumento6 páginasQué Es y Cómo Funciona Un Regulador de Gasivanescobar20031961Ainda não há avaliações
- Manejo de Memoria SD - MMC Con PIC 16F87XXDocumento5 páginasManejo de Memoria SD - MMC Con PIC 16F87XXMario Perez-JordanAinda não há avaliações
- Lenguajes VHDL y VerilogDocumento4 páginasLenguajes VHDL y Verilogpsycobrah100% (1)
- Ejercicios Básicos para MicroconladoresDocumento8 páginasEjercicios Básicos para MicroconladoresestanizniloAinda não há avaliações
- VHDL y FPGAsDocumento33 páginasVHDL y FPGAsOscarMITAinda não há avaliações
- Cálculo para El Diseño Mecánico-1Documento14 páginasCálculo para El Diseño Mecánico-1Enrique RiveraAinda não há avaliações
- Curso Microprocesadores y Micro Control Adores Unidad 1Documento102 páginasCurso Microprocesadores y Micro Control Adores Unidad 1Dario Cruz ParraAinda não há avaliações
- La Arquitectura Harvard y Sus VentajasDocumento3 páginasLa Arquitectura Harvard y Sus VentajasCesar Daniel Herrero ToruñoAinda não há avaliações
- Microprocesador VHDLDocumento12 páginasMicroprocesador VHDLVictor Jesus Sanz FloresAinda não há avaliações
- Generalidades Del MicrocontroladorDocumento8 páginasGeneralidades Del MicrocontroladorYurian Angelica Sanoja LunaAinda não há avaliações
- Interrupciones de Los Pic16f8xxxDocumento11 páginasInterrupciones de Los Pic16f8xxxtony100% (1)
- Tutorial Verilog BloqueDocumento42 páginasTutorial Verilog BloqueterrysconAinda não há avaliações
- Diseño de Una Alarma AntirroboDocumento12 páginasDiseño de Una Alarma AntirrobojahemscbAinda não há avaliações
- Laboratorio 3 - TecladoDocumento9 páginasLaboratorio 3 - TecladoManolo Camilo Ortega CondegaAinda não há avaliações
- Sistemas de Automatizacion, Mando y ControlDocumento16 páginasSistemas de Automatizacion, Mando y Controlzulbhf0% (1)
- Tutorial WarpDocumento8 páginasTutorial WarpMario Merino MárquezAinda não há avaliações
- 2 El Amplificador de Audio PDFDocumento17 páginas2 El Amplificador de Audio PDFEdgar MongeAinda não há avaliações
- Curso Codevision AVRDocumento90 páginasCurso Codevision AVRKevin FrancoAinda não há avaliações
- Microcontroladores Historia - Arquitectura AplicacionesDocumento89 páginasMicrocontroladores Historia - Arquitectura AplicacionesMaximiliano GiniAinda não há avaliações
- Microcontroladores PIC18F4550.Documento15 páginasMicrocontroladores PIC18F4550.Gabriel Acevedo lopezAinda não há avaliações
- Sesión 3 Introduccion A MicrocontroladoresDocumento84 páginasSesión 3 Introduccion A MicrocontroladoresGeiner David GranielAinda não há avaliações
- Reporte InvernaderoDocumento21 páginasReporte InvernaderoODALYS MONTSERRAT BELTRAN RUVALCABAAinda não há avaliações
- Verilog USMDocumento16 páginasVerilog USMRodStroyer GërtkAinda não há avaliações
- Operaciones Con BitsDocumento10 páginasOperaciones Con BitspatriciomelendesAinda não há avaliações
- Introduccion A Los MicroprocesadoresDocumento44 páginasIntroduccion A Los Microprocesadoresmariocbr100% (1)
- Tutorial AVRdesde 0Documento52 páginasTutorial AVRdesde 0darck_khronos100% (1)
- Mtodob 1 With Cover Page v2Documento10 páginasMtodob 1 With Cover Page v2jose morenoAinda não há avaliações
- Paso 4 - Diseñar e Implementar Un Circuito de Control Digital PIDDocumento12 páginasPaso 4 - Diseñar e Implementar Un Circuito de Control Digital PIDFranklinSilva100% (1)
- Fase 4 AportesDocumento13 páginasFase 4 Aportesgerman.toro3885Ainda não há avaliações
- Pic Pid PDFDocumento10 páginasPic Pid PDFJosé Luis Antonio Requeros HidalgoAinda não há avaliações
- Implementar Un Circuito de Control Digital PID (Documento11 páginasImplementar Un Circuito de Control Digital PID (johnbitaAinda não há avaliações
- Sem 9aDocumento12 páginasSem 9aaaaaAinda não há avaliações
- Informe Final N2-Controlador PIDDocumento10 páginasInforme Final N2-Controlador PIDMichael Infantes HuacancaAinda não há avaliações
- Controladores DiscretosDocumento12 páginasControladores DiscretosEdmundo R. NeriaAinda não há avaliações
- Controladores PID: P: Acción de Control Proporcional, Da Una Salida Del Controlador Que EsDocumento5 páginasControladores PID: P: Acción de Control Proporcional, Da Una Salida Del Controlador Que EsDaniel VanegasAinda não há avaliações
- Pid PDFDocumento5 páginasPid PDFJaime M Barrera CastilloAinda não há avaliações
- Controladores PID: P: Acción de Control Proporcional, Da Una Salida Del Controlador Que EsDocumento5 páginasControladores PID: P: Acción de Control Proporcional, Da Una Salida Del Controlador Que EsFrancisco MartinezAinda não há avaliações
- Foro Seman 1 Iacc Sisrtema ControlsDocumento3 páginasForo Seman 1 Iacc Sisrtema ControlsAlejandro AlvarezAinda não há avaliações
- Laboratorio 2 - More Miranda Carlos Gabriel A ENVIARDocumento20 páginasLaboratorio 2 - More Miranda Carlos Gabriel A ENVIARaugmorelopezAinda não há avaliações
- Laboratorio 1 - Sistema de Control Digital - 01Documento19 páginasLaboratorio 1 - Sistema de Control Digital - 01Boris Benites CalenzaniAinda não há avaliações
- Sintonización de Controladores PIDDocumento45 páginasSintonización de Controladores PIDluisAinda não há avaliações
- Control Digital - FASE 3Documento13 páginasControl Digital - FASE 3Jose Elias Perafan Leal100% (1)
- Laboratorio 2 - More Miranda Carlos GabrielDocumento11 páginasLaboratorio 2 - More Miranda Carlos GabrielAugusto More LopezAinda não há avaliações
- MicrobiologiaDocumento6 páginasMicrobiologiayannsi murilloAinda não há avaliações
- Operacion de Maquinaria PesadaDocumento101 páginasOperacion de Maquinaria PesadaEliycheque Panirari100% (1)
- Ficha de Notificacion SisvesoDocumento2 páginasFicha de Notificacion SisvesoJohanna VargasAinda não há avaliações
- ValorizacionDocumento15 páginasValorizacionANDRES GUZMAN BARRANTESAinda não há avaliações
- Sesión de Aprendizaje - Medimos El Tiempo en El RelojDocumento6 páginasSesión de Aprendizaje - Medimos El Tiempo en El RelojEliana Honorio94% (32)
- Leyes Universales de La MetafisicaDocumento25 páginasLeyes Universales de La Metafisicajrp139100% (2)
- Parrafo AmericaDocumento1 páginaParrafo AmericaAKD ArquitecturaAinda não há avaliações
- Articulacion TemporomandibularDocumento6 páginasArticulacion TemporomandibularJoy Elizabeth LivingstoneAinda não há avaliações
- Cómo Se Pagan Las Vacaciones No Disfrutadas en MéxicoDocumento6 páginasCómo Se Pagan Las Vacaciones No Disfrutadas en MéxicoAnne GaleanaAinda não há avaliações
- BitácoraDocumento15 páginasBitácorajfegioteamriton3Ainda não há avaliações
- Solucion de Caso de Estudio #2Documento4 páginasSolucion de Caso de Estudio #2Alejandra MVAinda não há avaliações
- HOJA DE INFORMACION TECNOLOGICA Historia Del Cojin 9 MayoDocumento1 páginaHOJA DE INFORMACION TECNOLOGICA Historia Del Cojin 9 MayoFernández DorisAinda não há avaliações
- Caso A FacturarDocumento4 páginasCaso A FacturarWalter castillo anguloAinda não há avaliações
- Manuel Puig y Wong Kar WaiDocumento21 páginasManuel Puig y Wong Kar WaiJulia Franco100% (1)
- Lógicas de Proyecto Roberto FernándezDocumento4 páginasLógicas de Proyecto Roberto FernándezVictoria Pintos0% (3)
- Cuento La Aventura Del Plato MágicoDocumento1 páginaCuento La Aventura Del Plato MágicomoranfonsecaraulAinda não há avaliações
- Resolucion SicDocumento84 páginasResolucion SicCamilo García SarmientoAinda não há avaliações
- ENSAYODocumento6 páginasENSAYOCarlos SanchezAinda não há avaliações
- Caso Práctico ProbabilidadDocumento2 páginasCaso Práctico Probabilidadlineylosadag75% (4)
- Costo Beneficio de Una CarreteraDocumento6 páginasCosto Beneficio de Una CarreteraVeronica MartinezAinda não há avaliações
- FORMATO GTH-P18-F1 Inscripcion o Actualizacion en El EscalafonDocumento2 páginasFORMATO GTH-P18-F1 Inscripcion o Actualizacion en El EscalafonLiyiPaterninaAinda não há avaliações
- PRACTICA - Unidad 2. Software de Simulación-V2Documento9 páginasPRACTICA - Unidad 2. Software de Simulación-V2Jonathan Pompeyo RamirezAinda não há avaliações
- Evaluación Sumativa 2Documento11 páginasEvaluación Sumativa 2ximenaAinda não há avaliações
- Rotafolio TantalioDocumento18 páginasRotafolio TantalioleitoAinda não há avaliações
- Izaje Camion PlumaDocumento20 páginasIzaje Camion PlumaDlanor Avlis RAinda não há avaliações
- Ra DrenajesDocumento146 páginasRa Drenajesuriel coronaAinda não há avaliações
- Actividad de SismoDocumento5 páginasActividad de SismoTania Peña GarciaAinda não há avaliações
- Certificado Gestion Final Sociedad Portuaria Del Dique 282Documento1 páginaCertificado Gestion Final Sociedad Portuaria Del Dique 282Mery Hellen VegaAinda não há avaliações
- Tiempos QuirurgicosDocumento10 páginasTiempos QuirurgicosRicardo MoralesAinda não há avaliações
- Sistema de Acumulación de CostosDocumento8 páginasSistema de Acumulación de CostosVeronica DazaAinda não há avaliações