Você também pode gostar
- Introduction to Power System ProtectionNo EverandIntroduction to Power System ProtectionAinda não há avaliações
- Introduction to Power System ProtectionNo EverandIntroduction to Power System ProtectionNota: 5 de 5 estrelas5/5 (1)
- E 489 ContentDocumento32 páginasE 489 ContentLimuel EspirituAinda não há avaliações
- System Neutral Resistance GroundingDocumento7 páginasSystem Neutral Resistance GroundingadhyarthaAinda não há avaliações
- White Paper 2009 System Neutral Resistance Grounding LBDocumento7 páginasWhite Paper 2009 System Neutral Resistance Grounding LBLong LeoAinda não há avaliações
- Short Circuit CalculationsDocumento15 páginasShort Circuit CalculationsJessica RibeiroAinda não há avaliações
- Ee553 Chap 4 1 NewDocumento30 páginasEe553 Chap 4 1 NewWorl BossAinda não há avaliações
- PEC006Documento7 páginasPEC006Ravi Kiran BAinda não há avaliações
- Fault Analysis by Symmetrical Components PDFDocumento29 páginasFault Analysis by Symmetrical Components PDFAayush PatidarAinda não há avaliações
- Types of Neutral Earthing in Power Distribution Part 2Documento7 páginasTypes of Neutral Earthing in Power Distribution Part 2shoham985Ainda não há avaliações
- Unit - 3: Symmetrical Fault AnalysisDocumento36 páginasUnit - 3: Symmetrical Fault Analysisdileep kumarAinda não há avaliações
- Resistance Earthed Systems: Fault CurrentsDocumento25 páginasResistance Earthed Systems: Fault CurrentsRameez Ahmed100% (1)
- Fault Analysis in Transmission System Using MatlabDocumento50 páginasFault Analysis in Transmission System Using MatlabSHIKHAR KHANDELWAL89% (46)
- A Learning Report On Short Circuit Studies From IEEE-399Documento8 páginasA Learning Report On Short Circuit Studies From IEEE-399Walter MenesesAinda não há avaliações
- Faults in Power SystemDocumento16 páginasFaults in Power SystemSadam MemonAinda não há avaliações
- Protection Of: AlternatorDocumento27 páginasProtection Of: AlternatorDev KumarAinda não há avaliações
- Transformer Inrush Currents and Protection 2603 003 A00Documento4 páginasTransformer Inrush Currents and Protection 2603 003 A00Joshi DhvanitAinda não há avaliações
- Short Circuit Cal 1Documento46 páginasShort Circuit Cal 1jhigz25Ainda não há avaliações
- Lecture 08 - Symmetrical FaultsDocumento45 páginasLecture 08 - Symmetrical FaultsPoor AdamAinda não há avaliações
- Accuracy of Voltage Sag AnalysisDocumento29 páginasAccuracy of Voltage Sag AnalysisLalita VAinda não há avaliações
- Earthing Transformers For Power SystemsDocumento12 páginasEarthing Transformers For Power SystemsSreekanth Reddy100% (1)
- Introduction To Short Circuit Current CalculationsDocumento46 páginasIntroduction To Short Circuit Current CalculationsrexAinda não há avaliações
- Section 01 (NXPowerLite)Documento44 páginasSection 01 (NXPowerLite)Ahmed FaragAinda não há avaliações
- ESBI White Paper Delayed Zero Crossings Following Short Circuit PDFDocumento6 páginasESBI White Paper Delayed Zero Crossings Following Short Circuit PDFbgojkovic13Ainda não há avaliações
- Question No. 1: What Are The Advantages and Disadvantages of The Various GroundingDocumento7 páginasQuestion No. 1: What Are The Advantages and Disadvantages of The Various Groundingraza239Ainda não há avaliações
- NGR PDFDocumento4 páginasNGR PDFmanicheAinda não há avaliações
- Guideline Bender RelaysDocumento31 páginasGuideline Bender RelaysvijaiprasathAinda não há avaliações
- Available Short Circuit CurrentDocumento17 páginasAvailable Short Circuit CurrentAnonymous IN80L4rRAinda não há avaliações
- Introduction To Short Circuit Current Calculations-R1Documento46 páginasIntroduction To Short Circuit Current Calculations-R1David WebbAinda não há avaliações
- Symmetrical Fault in Power SystemDocumento14 páginasSymmetrical Fault in Power Systemstudents answerAinda não há avaliações
- Section 04 (NXPowerLite)Documento40 páginasSection 04 (NXPowerLite)Ahmed FaragAinda não há avaliações
- Transformer Inrush Currents and Protection 2603 003 A00 PDFDocumento4 páginasTransformer Inrush Currents and Protection 2603 003 A00 PDFroyclhorAinda não há avaliações
- Industrial Power Systems Handbook PDFDocumento987 páginasIndustrial Power Systems Handbook PDFpadmajasivaAinda não há avaliações
- Resistance GroundingDocumento4 páginasResistance Groundingjawad_13Ainda não há avaliações
- Power Quality Unit 1Documento26 páginasPower Quality Unit 1P.V.RAMA SHARMAAinda não há avaliações
- Sunil Rao Chap 33Documento7 páginasSunil Rao Chap 33A Hasib ChowdhuryAinda não há avaliações
- Sources and Contributors To Short Circuit CurrentDocumento2 páginasSources and Contributors To Short Circuit Currentat35Ainda não há avaliações
- Neutral Grounding Types OkDocumento8 páginasNeutral Grounding Types OkAditya AstariAinda não há avaliações
- Batch - 14 - Protection Scheme of Busbars and Transmission LinesDocumento26 páginasBatch - 14 - Protection Scheme of Busbars and Transmission LinesYugendran KumaravelAinda não há avaliações
- Generator: Over VoltagesDocumento10 páginasGenerator: Over VoltagesKoushik BaruaAinda não há avaliações
- Electric Power Quality: (Open Elective-2)Documento57 páginasElectric Power Quality: (Open Elective-2)EEE CRRAinda não há avaliações
- Protection of Ac Generators and Motors: Generator FaultsDocumento10 páginasProtection of Ac Generators and Motors: Generator FaultsasdasasdsdfsdfAinda não há avaliações
- Unit Iii OvervoltagesDocumento16 páginasUnit Iii Overvoltageslvb123Ainda não há avaliações
- Grounding SystemDocumento3 páginasGrounding SystemAlfonso Hernan Novoa CalabranAinda não há avaliações
- High Resistance GroundingDocumento6 páginasHigh Resistance GroundingpecampbeAinda não há avaliações
- Power System Protection (EE-523) : Abdullah Munir Department of Electrical Engineering NeduetDocumento29 páginasPower System Protection (EE-523) : Abdullah Munir Department of Electrical Engineering NeduetJalees100% (1)
- AssignmentDocumento6 páginasAssignmentmidunAinda não há avaliações
- Overhead Transmission Line FaultsDocumento8 páginasOverhead Transmission Line FaultsQaisar_mastAinda não há avaliações
- Power Quality Seminar ReportDocumento26 páginasPower Quality Seminar ReportAbhishek Dasari100% (2)
- MS EPA Lecture Notes - 17-18 Faults in Electrical Power SystemsDocumento10 páginasMS EPA Lecture Notes - 17-18 Faults in Electrical Power SystemsmsavoooAinda não há avaliações
- AVRDocumento16 páginasAVRrehanbamneAinda não há avaliações
- Tana 2018 Gruond LastDocumento24 páginasTana 2018 Gruond LastTana AzeezAinda não há avaliações
- Grounding at Points Other Than System NeutralDocumento15 páginasGrounding at Points Other Than System NeutralWendy DuncanAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesAinda não há avaliações
- Power Systems Modelling and Fault Analysis: Theory and PracticeNo EverandPower Systems Modelling and Fault Analysis: Theory and PracticeNota: 2 de 5 estrelas2/5 (1)
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesAinda não há avaliações
- Modelling and Control of MMCDocumento142 páginasModelling and Control of MMCsohaibazamAinda não há avaliações
- ACSR 795KCMIL - Short Circuit WithstandDocumento1 páginaACSR 795KCMIL - Short Circuit WithstandsohaibazamAinda não há avaliações
- Mushrooms: 10 Ways: 1. Portobello Satay With Thai Peanut (Almond) SauceDocumento7 páginasMushrooms: 10 Ways: 1. Portobello Satay With Thai Peanut (Almond) SaucesohaibazamAinda não há avaliações
- Grade 4 Math Multiplication Game Catch The MonkeysDocumento4 páginasGrade 4 Math Multiplication Game Catch The MonkeyssohaibazamAinda não há avaliações
- Part 1: Harmonics: Measurement & Analysis of Harmonics & FlickerDocumento40 páginasPart 1: Harmonics: Measurement & Analysis of Harmonics & FlickerCüneyt Elhan100% (2)
- File Name SjgftamperDocumento7 páginasFile Name SjgftamperM Waqas PkAinda não há avaliações
- Siemens - Harmonics in Power Systems, Causes Effects and Control (2013)Documento24 páginasSiemens - Harmonics in Power Systems, Causes Effects and Control (2013)micaAinda não há avaliações
- Sample QuestionsDocumento1 páginaSample QuestionssohaibazamAinda não há avaliações
- Maximabook PDFDocumento121 páginasMaximabook PDFWarley GramachoAinda não há avaliações
- Buck Converter Design NoteDocumento17 páginasBuck Converter Design NoteZhao XuAinda não há avaliações
- Chapter 6Documento14 páginasChapter 6sohaibazamAinda não há avaliações
- Basic Electronic & Transistor Circuits PDFDocumento54 páginasBasic Electronic & Transistor Circuits PDFSandeep GoyalAinda não há avaliações
- Lecture 2Documento28 páginasLecture 2sohaibazamAinda não há avaliações
- Ajt PDFDocumento3 páginasAjt PDFsohaibazamAinda não há avaliações
- Introduction To Power Systems ProtectionDocumento6 páginasIntroduction To Power Systems ProtectionsohaibazamAinda não há avaliações
- Vol12 Tab03Documento168 páginasVol12 Tab03ajeeshsivanAinda não há avaliações
- Questions On GroundingDocumento1 páginaQuestions On GroundingsohaibazamAinda não há avaliações
- Assignment 1 Electronics 2EDocumento2 páginasAssignment 1 Electronics 2EsohaibazamAinda não há avaliações
- When Zombies Attack: Mathematical Modelling of An Outbreak of Zombie InfectionDocumento18 páginasWhen Zombies Attack: Mathematical Modelling of An Outbreak of Zombie InfectionemmaafiAinda não há avaliações
- Catalogo ServoDocumento9 páginasCatalogo ServoOMAR DAVID BERNAL CUASPAAinda não há avaliações
- Non Directional OC RelayDocumento13 páginasNon Directional OC RelayAnshuman BeheraAinda não há avaliações
- Flexi EDGE BTS - Front Panels 1 PDFDocumento15 páginasFlexi EDGE BTS - Front Panels 1 PDFOpeyemi OlusanyaAinda não há avaliações
- Matching Wire Size To Circuit AmperageDocumento6 páginasMatching Wire Size To Circuit AmperageDash SmthAinda não há avaliações
- WS3418 WinsemiDocumento8 páginasWS3418 WinsemiPaul MejiaAinda não há avaliações
- DEWA Regulations 2017Documento123 páginasDEWA Regulations 2017siva_nagesh_280% (5)
- Push Pull Power AmplifierDocumento4 páginasPush Pull Power AmplifierSwarnali NathAinda não há avaliações
- 7.noload and Blocked Rotor Test On Singlephase Induction MotorDocumento5 páginas7.noload and Blocked Rotor Test On Singlephase Induction Motormandadi_sailesh100% (2)
- Exam... Electrical Machnes-IDocumento31 páginasExam... Electrical Machnes-Icharlesc5746Ainda não há avaliações
- Rosemary Ainslie's COP 17 CircuitDocumento23 páginasRosemary Ainslie's COP 17 CircuitFlavian100% (2)
- Electrical Safety - Beware The BitesDocumento24 páginasElectrical Safety - Beware The BitesAnonymous wxL9DSuYk100% (1)
- Lab Manual 5-9Documento20 páginasLab Manual 5-9muhammadAinda não há avaliações
- Saso 2815-2021Documento16 páginasSaso 2815-2021riadhAinda não há avaliações
- To Determine Resistance and Impendance of An Inductor With or Without Iron CoreDocumento8 páginasTo Determine Resistance and Impendance of An Inductor With or Without Iron CoreABHISHEK TIWARI94% (32)
- What Is A LAN TesterDocumento3 páginasWhat Is A LAN TesterMarvin Fajardo100% (1)
- KUMBHI Industrial Tranning ReportDocumento44 páginasKUMBHI Industrial Tranning ReportMonika PatilAinda não há avaliações
- Reluctance Motor: Fig.1 4 Pole Synchronous MotorDocumento2 páginasReluctance Motor: Fig.1 4 Pole Synchronous MotorSourav KumarAinda não há avaliações
- DRE90L4Documento2 páginasDRE90L4Ramiro Sew EurodriveAinda não há avaliações
- Physical Handout NotesDocumento121 páginasPhysical Handout NotesJimmy MachariaAinda não há avaliações
- Check List For UPSDocumento1 páginaCheck List For UPSsiruslara6491Ainda não há avaliações
- UCI224G - Technical Data SheetDocumento8 páginasUCI224G - Technical Data SheetAsandoval12345Ainda não há avaliações
- BD249 DatasheetDocumento2 páginasBD249 DatasheetMarko MatićAinda não há avaliações
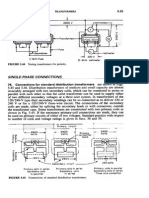
- Transformers ConnectionsDocumento6 páginasTransformers Connectionsgeorgel1980Ainda não há avaliações
- Synchronous Motor: Motor On Load With Constant ExcitationDocumento7 páginasSynchronous Motor: Motor On Load With Constant ExcitationShoaib KhanAinda não há avaliações
- Ac 04Documento1 páginaAc 04elijbbAinda não há avaliações
- DVD Rv30brDocumento72 páginasDVD Rv30brMario LealAinda não há avaliações
- Owner's Manual & Safety InstructionsDocumento12 páginasOwner's Manual & Safety InstructionsJVH19780% (1)
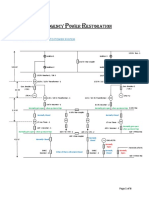
- Mergency Ower Estoration: Single Line Diagram of STG Power SystemDocumento6 páginasMergency Ower Estoration: Single Line Diagram of STG Power SystemGuitarist Ratan DebnathAinda não há avaliações
- Faculty of Natural and Applied Sciences Department of Physics PHY 108 Electricity and Magnetism Experiment 4: TransformerDocumento7 páginasFaculty of Natural and Applied Sciences Department of Physics PHY 108 Electricity and Magnetism Experiment 4: TransformerChukwunomso UnaoguAinda não há avaliações
- Lab 5 - Characteristics of A BJT and DC Load LineDocumento9 páginasLab 5 - Characteristics of A BJT and DC Load Linevishvajeettiwari96Ainda não há avaliações