Você também pode gostar
- Laboratorio 2 Automatización Industrial (Completar)Documento11 páginasLaboratorio 2 Automatización Industrial (Completar)DANIEL ORLANDO SEGURA CABALLEROAinda não há avaliações
- Entradas Salidas DiscretasDocumento13 páginasEntradas Salidas DiscretasMijael Ramos Barrientos100% (1)
- Caracteristicas de Jaula de ArdillaDocumento4 páginasCaracteristicas de Jaula de ArdillaStephanie Zapata SantillánAinda não há avaliações
- Diodo de Potencia PDFDocumento31 páginasDiodo de Potencia PDFCristian 1993100% (1)
- Procedimiento Práctico Multiplicadores de VoltajeDocumento4 páginasProcedimiento Práctico Multiplicadores de Voltajemac3132Ainda não há avaliações
- ProblemasDocumento5 páginasProblemasNoel Gomez100% (1)
- Lección 15 - Reguladores CA-CADocumento14 páginasLección 15 - Reguladores CA-CAKike Fernandez100% (1)
- Trabajo Accionamientos - Cicloconvertidor MonofásicoDocumento16 páginasTrabajo Accionamientos - Cicloconvertidor MonofásicoRamon Zo Za100% (1)
- Redes Industriales Canbus AplicacionDocumento37 páginasRedes Industriales Canbus AplicacionJavier Eduardo Jauregui100% (1)
- Tiristor SMDDocumento6 páginasTiristor SMDJesús Bonilla QuispeAinda não há avaliações
- Norma IEC-1131-1Documento6 páginasNorma IEC-1131-1alejo662007100% (6)
- Diseño de Disparo de Un SCR Con R-CDocumento6 páginasDiseño de Disparo de Un SCR Con R-Cpaco_tunAinda não há avaliações
- Normativas de Diseño para Una Adecuada Implementacion de AlarmasDocumento15 páginasNormativas de Diseño para Una Adecuada Implementacion de AlarmasFernando Sánchez100% (1)
- Diodo Todo Sobre DiodoDocumento20 páginasDiodo Todo Sobre DiodoqardzlinAinda não há avaliações
- Convertidores DC-DC PDFDocumento108 páginasConvertidores DC-DC PDFMarcos VeraAinda não há avaliações
- Electonica de PotenciaDocumento6 páginasElectonica de PotenciaVictor Cerda MorenoAinda não há avaliações
- CicloconvertidorDocumento5 páginasCicloconvertidorEdersonMuñanteSalazarAinda não há avaliações
- Experiencia 2 Accionamientos Electricos 1Documento4 páginasExperiencia 2 Accionamientos Electricos 1FFFFAinda não há avaliações
- PRACTICA 7 Rectificacion Trifasica ControladaDocumento7 páginasPRACTICA 7 Rectificacion Trifasica ControladaAlex PintadoAinda não há avaliações
- Laboratorio No 1 Rectificación No Controlada 1Documento10 páginasLaboratorio No 1 Rectificación No Controlada 1Omar Jose Castro CastroAinda não há avaliações
- Ad 595 Datasheet TraducidoDocumento9 páginasAd 595 Datasheet TraducidojonathansataAinda não há avaliações
- Interruptores de Aceite en Media TensionDocumento5 páginasInterruptores de Aceite en Media TensionMarco XDAinda não há avaliações
- Tarea N°2 Rectificador Trifasico XDDocumento8 páginasTarea N°2 Rectificador Trifasico XDPiero AlvaAinda não há avaliações
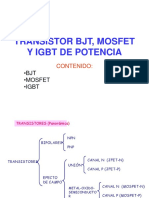
- Transistor BJT, Mosfet y Igbt de PotenciaDocumento22 páginasTransistor BJT, Mosfet y Igbt de PotenciaAndrésEduardoMartinezAinda não há avaliações
- Informe Previo - Disparo Del TiristorDocumento22 páginasInforme Previo - Disparo Del TiristorDavidAinda não há avaliações
- Protección Contra DV/DTDocumento3 páginasProtección Contra DV/DTTania Torres0% (2)
- Puente Rectificador Monofasico SemicontroladoDocumento8 páginasPuente Rectificador Monofasico SemicontroladoCarmen Rosa Amau QuispeAinda não há avaliações
- Elementos de Un Servo DriveDocumento38 páginasElementos de Un Servo DriveHalamasSimon100% (1)
- Profine-Preguntas ProfinetDocumento2 páginasProfine-Preguntas ProfinetDaniel SanchezAinda não há avaliações
- Informe N°1 de Electronica IndustrialDocumento17 páginasInforme N°1 de Electronica IndustrialGherson D. Toro MelendrezAinda não há avaliações
- Arrancador de Estado Solido - Variador de Frecuencia OkDocumento18 páginasArrancador de Estado Solido - Variador de Frecuencia OkMeza Puchoc Jean100% (1)
- Práctica 5. Variador de VelocidadDocumento5 páginasPráctica 5. Variador de VelocidadJosh Israel PritchardAinda não há avaliações
- Circuito de Disparo de Triac en RCDocumento7 páginasCircuito de Disparo de Triac en RCchristianAinda não há avaliações
- Cuestionario Unidad3 RespuestasDocumento5 páginasCuestionario Unidad3 RespuestasAlejandro Leyva50% (2)
- Lab 1 Convecional Vs ViwaDocumento3 páginasLab 1 Convecional Vs ViwaJefferson DefazAinda não há avaliações
- Muestreo y ReconstruccionDocumento6 páginasMuestreo y ReconstruccionDiegoAinda não há avaliações
- Manejo de Punto Flotante en Pic Basic Pro PlusDocumento14 páginasManejo de Punto Flotante en Pic Basic Pro PlusFatality Joseph100% (1)
- Placa de Características en Las MáquinasDocumento6 páginasPlaca de Características en Las MáquinasDavidsito YambayAinda não há avaliações
- Generalidades de Los PLCDocumento5 páginasGeneralidades de Los PLCJesus SoberonAinda não há avaliações
- Rectificador Monofásico Controlado M1CDocumento8 páginasRectificador Monofásico Controlado M1CAlejandro Espinoza ArancibiaAinda não há avaliações
- Norma IecDocumento9 páginasNorma IecAlejandro Quinteros CabreraAinda não há avaliações
- Practica 2-Lab 2020Documento12 páginasPractica 2-Lab 2020Erik BermudezAinda não há avaliações
- Ieee Espanol Cap1-5Documento25 páginasIeee Espanol Cap1-5Robert OsinAinda não há avaliações
- Informe Accionamientos Eléctricos: Sensores de Corriente y VoltajeDocumento6 páginasInforme Accionamientos Eléctricos: Sensores de Corriente y VoltajeCarolina BastidasAinda não há avaliações
- Digitalizacion de SeñalesDocumento9 páginasDigitalizacion de SeñalesCamila Erazo FigueroaAinda não há avaliações
- Laboratorio 6Documento16 páginasLaboratorio 6ChristianAinda não há avaliações
- CICLOCONVERTIDORESDocumento15 páginasCICLOCONVERTIDORESIsrael NavarroAinda não há avaliações
- ML 831 - 2020-2 - Calificada-1 PDFDocumento3 páginasML 831 - 2020-2 - Calificada-1 PDFRamírez Breña JosecarlosAinda não há avaliações
- Cuestionario 6 7 8Documento17 páginasCuestionario 6 7 8miguel angel ceballos aguadoAinda não há avaliações
- 5 Ejercicios MOSFETDocumento8 páginas5 Ejercicios MOSFETAndres Reyes33% (3)
- LAB 3 Laveriano - JefryDocumento17 páginasLAB 3 Laveriano - JefryMelvin Billy Leon CapchaAinda não há avaliações
- Inversor de Medio PuenteDocumento4 páginasInversor de Medio PuenteIsaac HernandezAinda não há avaliações
- Disparo Lineal de TiristoresDocumento13 páginasDisparo Lineal de TiristoresRaul CarrilloAinda não há avaliações
- Ejercicios Electronica Industrial Unidad IDocumento6 páginasEjercicios Electronica Industrial Unidad IJuanAinda não há avaliações
- Informe Previo FetDocumento4 páginasInforme Previo FetElvis Medardo Cano LaymeAinda não há avaliações
- Tipos de FusesDocumento6 páginasTipos de FusesIsaac Zavala100% (1)
- Informe ControladorDocumento23 páginasInforme ControladorOmar ArguelloAinda não há avaliações
- El Control Digital en La IndustriaDocumento8 páginasEl Control Digital en La IndustriaJuan GalvesAinda não há avaliações
- Control de Velocidad y Posición de Un Motor DCDocumento56 páginasControl de Velocidad y Posición de Un Motor DCromulozg100% (1)
- Capítulo 2Documento67 páginasCapítulo 2turagoAinda não há avaliações
- Trabajo de Investigación Efectos Biológicos Del Campo ElectromagnéticoDocumento12 páginasTrabajo de Investigación Efectos Biológicos Del Campo ElectromagnéticoharoldAinda não há avaliações
- ControlDocumento17 páginasControlharoldAinda não há avaliações
- 38 41 Gravitación Control Digital TAREA GRUPALDocumento13 páginas38 41 Gravitación Control Digital TAREA GRUPALharoldAinda não há avaliações
- Tutorial de OADM 1Documento10 páginasTutorial de OADM 1haroldAinda não há avaliações
- VlanDocumento1 páginaVlanharoldAinda não há avaliações
- 38 41 Gravitación Control Digital TAREA GRUPALDocumento13 páginas38 41 Gravitación Control Digital TAREA GRUPALharoldAinda não há avaliações
- Trabajo de Investigación Efectos Biológicos Del Campo ElectromagnéticoDocumento12 páginasTrabajo de Investigación Efectos Biológicos Del Campo ElectromagnéticoharoldAinda não há avaliações
- Sistemas de Control Digital - ProyectoDocumento22 páginasSistemas de Control Digital - ProyectoharoldAinda não há avaliações
- Informe 3Documento14 páginasInforme 3haroldAinda não há avaliações
- Sistemas de Control Digital - ProyectoDocumento22 páginasSistemas de Control Digital - ProyectoharoldAinda não há avaliações
- ControlDocumento17 páginasControlharoldAinda não há avaliações
- LABORATORIO2Documento14 páginasLABORATORIO2haroldAinda não há avaliações
- Práctica de Laboratorio 2 - Uso de Wireshark para Ver El Tráfico de La RedDocumento21 páginasPráctica de Laboratorio 2 - Uso de Wireshark para Ver El Tráfico de La RedDaniel Eduardo Pech CanulAinda não há avaliações
- Equipo Inmunohistoquimica Benchmark Ultra PlusDocumento336 páginasEquipo Inmunohistoquimica Benchmark Ultra PlusCarlos FernandezAinda não há avaliações
- Tarea 2 - Herramienta TecnologicaDocumento10 páginasTarea 2 - Herramienta TecnologicaSiboney MatambaAinda não há avaliações
- Capitulo 1 Microcontrolador Pic16f84aDocumento4 páginasCapitulo 1 Microcontrolador Pic16f84aJose Luis Rosario SalvadorAinda não há avaliações
- Copiar o Modificar Status GUI para Un ALVDocumento7 páginasCopiar o Modificar Status GUI para Un ALVElvis MendozaAinda não há avaliações
- 1.3.1.6 Lab - Threat IdentificationDocumento3 páginas1.3.1.6 Lab - Threat IdentificationAneurisAinda não há avaliações
- KSG2 Planeaci N Actividades U3 2020Documento17 páginasKSG2 Planeaci N Actividades U3 2020Miguel Dominguez de GarcíaAinda não há avaliações
- Laptop 2020Documento7 páginasLaptop 2020Mario CésarAinda não há avaliações
- T05-A01-Instroducción A Los Sistemas en Red.Documento96 páginasT05-A01-Instroducción A Los Sistemas en Red.Saúl Romero PereaAinda não há avaliações
- All in One Style L2: Manual de UsuarioDocumento34 páginasAll in One Style L2: Manual de UsuarioRodrymix SoriaAinda não há avaliações
- Congreso FPGAs 2011 Tenerife PDFDocumento306 páginasCongreso FPGAs 2011 Tenerife PDFJuan Pablo BarriosAinda não há avaliações
- Diccionario de Datos 2015 - IDocumento41 páginasDiccionario de Datos 2015 - IAnonymous KTkMFVNvAinda não há avaliações
- 3er Grado Cuadernillo FinalDocumento24 páginas3er Grado Cuadernillo FinalOscar De La Cruz CalvoAinda não há avaliações
- Manual de Practicas de Taller de BD IscDocumento67 páginasManual de Practicas de Taller de BD IscRosy Mar OjedaAinda não há avaliações
- Tesis Arreglada (No. D Tablas, Llamado Al Lector) 1diciembre2021Documento139 páginasTesis Arreglada (No. D Tablas, Llamado Al Lector) 1diciembre2021planificacionuasdsanjuan planificacionuasdsanjuanAinda não há avaliações
- Toshiba 255 Users Manual 131191.en - EsDocumento168 páginasToshiba 255 Users Manual 131191.en - EsAnonymous 8mDeWDICC0Ainda não há avaliações
- Registro - Taller Evaluación DiagnósticaDocumento5 páginasRegistro - Taller Evaluación DiagnósticaBrenda OlveraAinda não há avaliações
- Catalogo de ServiciosDocumento3 páginasCatalogo de ServiciosMayra Cordero BeltranAinda não há avaliações
- Introducción A La CompilaciónDocumento7 páginasIntroducción A La CompilaciónValentin ChoquehuancaAinda não há avaliações
- Hardening Windows Server 8Documento21 páginasHardening Windows Server 8Julián Briane100% (1)
- Objetivos MOS Excel 2016Documento3 páginasObjetivos MOS Excel 2016Eder Alan Magaña DominguezAinda não há avaliações
- Guía de Un Empleado para Una Computación Saludable - ErgonomíaDocumento2 páginasGuía de Un Empleado para Una Computación Saludable - ErgonomíascribdcontigoAinda não há avaliações
- Presentacion 13 FundamentosDocumento19 páginasPresentacion 13 Fundamentoskerlin liberatoAinda não há avaliações
- Ga1 - 220501092-Aa5-Ev02Documento12 páginasGa1 - 220501092-Aa5-Ev02JHON FREDY JARAMILLO LOPEZAinda não há avaliações
- Auditor InformaticoDocumento10 páginasAuditor InformaticoCruz KenedyAinda não há avaliações
- Actividad 4 Modelos de Mejora de ProcesosDocumento1 páginaActividad 4 Modelos de Mejora de ProcesosCristian Herrera PeñaAinda não há avaliações
- MUESTRA Evaluacion de Proceso 01 - OfimaticaDocumento4 páginasMUESTRA Evaluacion de Proceso 01 - OfimaticaHanssel R. CastroAinda não há avaliações
- Reporte Planes de Mejora ARL AlisstaDocumento15 páginasReporte Planes de Mejora ARL AlisstaLeo BravoAinda não há avaliações
- Trabajo Actividad 1Documento6 páginasTrabajo Actividad 1Eduardo JDAinda não há avaliações
- Respaldos en ServidoresDocumento6 páginasRespaldos en ServidoresIsaac AlbertoAinda não há avaliações