Você também pode gostar
- Ee8591 DSPDocumento28 páginasEe8591 DSPtamizh kaviAinda não há avaliações
- It1252 Digital Signal ProcessingDocumento22 páginasIt1252 Digital Signal ProcessingainugiriAinda não há avaliações
- Chapter 2 Discrete-Time Signals and Systems: IntroductionDocumento21 páginasChapter 2 Discrete-Time Signals and Systems: IntroductionYiwen HsiAinda não há avaliações
- IT1252 DSP (5th Sem)Documento52 páginasIT1252 DSP (5th Sem)baskarbalachandranAinda não há avaliações
- DSP 1 Signals and SystemsDocumento73 páginasDSP 1 Signals and SystemsAira Mae CrespoAinda não há avaliações
- Properties - of - ConvolutionDocumento25 páginasProperties - of - Convolutionapi-26581966Ainda não há avaliações
- DSP Chapter 2 Part 1Documento45 páginasDSP Chapter 2 Part 1api-26581966100% (1)
- Digital Signal Processing Question Bank 01Documento37 páginasDigital Signal Processing Question Bank 01Mathi YuvarajanAinda não há avaliações
- Digital Signal Processing Important Two Mark Questions With AnswersDocumento15 páginasDigital Signal Processing Important Two Mark Questions With AnswerssaiAinda não há avaliações
- Uploads 1Documento29 páginasUploads 1MnshAinda não há avaliações
- Digital Signal Processing Question Bank 02Documento24 páginasDigital Signal Processing Question Bank 02Mathi YuvarajanAinda não há avaliações
- Discrete-Time Signals and SystemsDocumento241 páginasDiscrete-Time Signals and Systemsvmohanakrishnaredddy12Ainda não há avaliações
- Tute SignalsDocumento12 páginasTute SignalsNikhil KumAinda não há avaliações
- Question BankDocumento8 páginasQuestion Bankpriyakanthr5883Ainda não há avaliações
- Discrete-Time Systems: Basic System PropertiesDocumento6 páginasDiscrete-Time Systems: Basic System Propertiesapi-19951707Ainda não há avaliações
- Digital Signal Processing I/ 4th Class/ 2020-2021 Dr. Abbas Hussien & Dr. Ammar GhalibDocumento4 páginasDigital Signal Processing I/ 4th Class/ 2020-2021 Dr. Abbas Hussien & Dr. Ammar GhalibSahdanAinda não há avaliações
- 02-Isyarat Dan Sistem Diskret: Dr. Risanuri HidayatDocumento79 páginas02-Isyarat Dan Sistem Diskret: Dr. Risanuri HidayatAlien JeskerAinda não há avaliações
- Digital Signal Processing Important 2 Two Mark Question and Answer IT 1252Documento14 páginasDigital Signal Processing Important 2 Two Mark Question and Answer IT 1252startedforfunAinda não há avaliações
- Exercises For Signals and Systems (Part Five)Documento3 páginasExercises For Signals and Systems (Part Five)Vincent YuchiAinda não há avaliações
- Department of Electrical Engineering Digital Signal ProcessingDocumento5 páginasDepartment of Electrical Engineering Digital Signal ProcessingISHWARI PRASHADAinda não há avaliações
- 1.1. Discrete-Time Signals and Systems. Basic DefinitionsDocumento11 páginas1.1. Discrete-Time Signals and Systems. Basic DefinitionsNirmal Kumar PandeyAinda não há avaliações
- Assignment 5: IC260 - IIT MandiDocumento3 páginasAssignment 5: IC260 - IIT MandiSourav SamantAinda não há avaliações
- Unit I - Discrete Fourier Transform Part - ADocumento10 páginasUnit I - Discrete Fourier Transform Part - AindhuAinda não há avaliações
- Assignment 3: Digital Signal Processing (ELE222T) DTFT and DFT Dr. Priyanka Kokil QuestionsDocumento4 páginasAssignment 3: Digital Signal Processing (ELE222T) DTFT and DFT Dr. Priyanka Kokil QuestionsAswathy ManojAinda não há avaliações
- Lecture 2 - DTSDocumento28 páginasLecture 2 - DTSq6hvqqzy5fAinda não há avaliações
- Unit-I Review of Discrete Signals and Systems: SignalDocumento26 páginasUnit-I Review of Discrete Signals and Systems: SignalRaghuAinda não há avaliações
- Ee 473 HW3Documento1 páginaEe 473 HW3Hakan UlucanAinda não há avaliações
- 01 Basicsignal 02Documento13 páginas01 Basicsignal 02Rithik JainAinda não há avaliações
- Lab 05Documento3 páginasLab 05Misbah Sajid ChaudhryAinda não há avaliações
- Concept of Fourier Analysis:: K N W JWNDocumento31 páginasConcept of Fourier Analysis:: K N W JWNSagata BanerjeeAinda não há avaliações
- Discrete - Time System and AnalysisDocumento113 páginasDiscrete - Time System and Analysisapaijas0% (2)
- Chapter 1 Introduction To DSP PDFDocumento19 páginasChapter 1 Introduction To DSP PDFEstifanose LulsegedAinda não há avaliações
- 2 Submitted By: SHOVAN DHAR ID:182000320e: Time SeriesDocumento1 página2 Submitted By: SHOVAN DHAR ID:182000320e: Time Seriessaiba nazninAinda não há avaliações
- EE5130: Digital Signal ProcessingDocumento3 páginasEE5130: Digital Signal ProcessingSHUBHAM ANAND VERMA EE20M540Ainda não há avaliações
- Digital Signal ProcessingDocumento21 páginasDigital Signal ProcessingMathi YuvarajanAinda não há avaliações
- Assignment FALL2018Documento2 páginasAssignment FALL2018UdayAinda não há avaliações
- Examination Paper For TTT4120 Digital Signal ProcessingDocumento9 páginasExamination Paper For TTT4120 Digital Signal ProcessingSr SeAinda não há avaliações
- Signal - System - Ch2 (LTIV)Documento42 páginasSignal - System - Ch2 (LTIV)Nigar QurbanovaAinda não há avaliações
- Lecture 2 Review of Discrete-Time Signal and System AnalysisDocumento41 páginasLecture 2 Review of Discrete-Time Signal and System AnalysisAman SharmaAinda não há avaliações
- Compute 32 Point DFT XDocumento4 páginasCompute 32 Point DFT XNishiya VijayanAinda não há avaliações
- DSP - Linear ConvolutionDocumento7 páginasDSP - Linear ConvolutionKankan GhoshAinda não há avaliações
- Digital Signal Processing: Md. Manjurul Gani, Lecturer, EEE, CUETDocumento33 páginasDigital Signal Processing: Md. Manjurul Gani, Lecturer, EEE, CUETJamil RofiAinda não há avaliações
- PS1 Signals and Systems 12jan2024Documento3 páginasPS1 Signals and Systems 12jan2024mrinali.minnu9Ainda não há avaliações
- 2-LTI Discrete Time SystemsDocumento22 páginas2-LTI Discrete Time SystemsBomber KillerAinda não há avaliações
- It6502 2m-1 RejinpaulDocumento12 páginasIt6502 2m-1 RejinpaulTejaswini PydiAinda não há avaliações
- DSP Question Bank 8-10-15Documento14 páginasDSP Question Bank 8-10-15raghav dhamaniAinda não há avaliações
- Discrete-Time Signals and Systems: Gao Xinbo School of E.E., Xidian UnivDocumento40 páginasDiscrete-Time Signals and Systems: Gao Xinbo School of E.E., Xidian UnivNory Elago CagatinAinda não há avaliações
- LTI Described by Difference Equations: Yn XK NDocumento4 páginasLTI Described by Difference Equations: Yn XK NMnshAinda não há avaliações
- Ece308 7 PDFDocumento4 páginasEce308 7 PDFHavotAlbeyboniAinda não há avaliações
- LTI Described by Difference Equations: Yn XK NDocumento4 páginasLTI Described by Difference Equations: Yn XK NHavotAlbeyboniAinda não há avaliações
- Digital Signal Processing Important Two Mark Questions With AnswersDocumento15 páginasDigital Signal Processing Important Two Mark Questions With AnswersShiv KumarAinda não há avaliações
- DSP Lectures v2 (Chapter2)Documento32 páginasDSP Lectures v2 (Chapter2)vvvssssvvv100% (1)
- DSP - Nov 19 Q&a PDFDocumento17 páginasDSP - Nov 19 Q&a PDFAnonymous yO7rcec6vuAinda não há avaliações
- Barlett MethodDocumento15 páginasBarlett Methodking khanAinda não há avaliações
- DT LTI Systems: Unit Impulse (Sample) Response and Convolution SumDocumento45 páginasDT LTI Systems: Unit Impulse (Sample) Response and Convolution SumK P NasitAinda não há avaliações
- Index: Exp No. Experiment Name Date of Performance Date of Checking Signature MarksDocumento41 páginasIndex: Exp No. Experiment Name Date of Performance Date of Checking Signature MarksAvinash JhaAinda não há avaliações
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Ainda não há avaliações
- Random Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101No EverandRandom Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101Ainda não há avaliações
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Ainda não há avaliações
- 5.ee6201 May 2016Documento9 páginas5.ee6201 May 2016Anonymous yO7rcec6vuAinda não há avaliações
- 5.TR, April 2017Documento2 páginas5.TR, April 2017Anonymous yO7rcec6vuAinda não há avaliações
- Anna University Examination Questions: EE6201-Circuit Theory NOV - 2015Documento9 páginasAnna University Examination Questions: EE6201-Circuit Theory NOV - 2015Anonymous yO7rcec6vuAinda não há avaliações
- Anna University Examination Questions: EE6201-Circuit Theory May - 2015Documento7 páginasAnna University Examination Questions: EE6201-Circuit Theory May - 2015Anonymous yO7rcec6vuAinda não há avaliações
- 6.TR Nov'2017Documento2 páginas6.TR Nov'2017Anonymous yO7rcec6vuAinda não há avaliações
- Anna University Examination Questions: EE6201-Circuit Theory May - 2014Documento8 páginasAnna University Examination Questions: EE6201-Circuit Theory May - 2014Anonymous yO7rcec6vuAinda não há avaliações
- Anna University Examination Questions: EE6201-Circuit Theory NOV - 2014Documento8 páginasAnna University Examination Questions: EE6201-Circuit Theory NOV - 2014Anonymous yO7rcec6vuAinda não há avaliações
- 4.EI6401TR Nov2016 - KeyDocumento13 páginas4.EI6401TR Nov2016 - KeyAnonymous yO7rcec6vuAinda não há avaliações
- Ce Apr 19 R17Documento18 páginasCe Apr 19 R17Anonymous yO7rcec6vuAinda não há avaliações
- Ce Nov 19 R17Documento18 páginasCe Nov 19 R17Anonymous yO7rcec6vuAinda não há avaliações
- 1.EI 6401 - April 15 - TR KeyDocumento26 páginas1.EI 6401 - April 15 - TR KeyAnonymous yO7rcec6vuAinda não há avaliações
- 2.EI 6401 - Nov 15 - TR KeyDocumento17 páginas2.EI 6401 - Nov 15 - TR KeyAnonymous yO7rcec6vuAinda não há avaliações
- Ei 6602 PC April 2017Documento12 páginasEi 6602 PC April 2017Anonymous yO7rcec6vuAinda não há avaliações
- DSBSC NotesDocumento17 páginasDSBSC NotesAnonymous yO7rcec6vuAinda não há avaliações
- Ec8351 Electron Devices and CircuitsDocumento1 páginaEc8351 Electron Devices and CircuitsAnonymous yO7rcec6vuAinda não há avaliações
- Aptitude QuestionsDocumento9 páginasAptitude QuestionsAnonymous yO7rcec6vuAinda não há avaliações
- EI 8352 TR - Nov 17Documento2 páginasEI 8352 TR - Nov 17Anonymous yO7rcec6vuAinda não há avaliações
- 2.EI6602 PC Nov'2016Documento23 páginas2.EI6602 PC Nov'2016Anonymous yO7rcec6vuAinda não há avaliações
- 1.EI 6602 PC April 16 - KeyDocumento25 páginas1.EI 6602 PC April 16 - KeyAnonymous yO7rcec6vuAinda não há avaliações
- Mechatronics - Mumbai Univ - Sem 8 ElexDocumento10 páginasMechatronics - Mumbai Univ - Sem 8 Elex111ashwinAinda não há avaliações
- Name: Digital Logic Circuits (Common To ICE) Part A (20X2 40 Marks) Answer All QuestionsDocumento2 páginasName: Digital Logic Circuits (Common To ICE) Part A (20X2 40 Marks) Answer All QuestionsAnonymous yO7rcec6vuAinda não há avaliações
- Ei6801 - Computer Control of Process Part-A Answer All Questions (5x2 10)Documento7 páginasEi6801 - Computer Control of Process Part-A Answer All Questions (5x2 10)Anonymous yO7rcec6vuAinda não há avaliações
- EI 6602 - Process ControlDocumento2 páginasEI 6602 - Process ControlAnonymous yO7rcec6vuAinda não há avaliações
- K L N College of Engineering Pottapalaym: 1 Gshs S 100Documento2 páginasK L N College of Engineering Pottapalaym: 1 Gshs S 100Anonymous yO7rcec6vuAinda não há avaliações
- Aptitude QuestionsDocumento9 páginasAptitude QuestionsAnonymous yO7rcec6vuAinda não há avaliações
- Ic6501 Control Systems: UNIT-1 (2 Mark Q/A)Documento6 páginasIc6501 Control Systems: UNIT-1 (2 Mark Q/A)Anonymous yO7rcec6vuAinda não há avaliações
- CS ASS2 (13-17batch)Documento3 páginasCS ASS2 (13-17batch)Anonymous yO7rcec6vuAinda não há avaliações
- IC6701 May 18 With KeyDocumento14 páginasIC6701 May 18 With KeyAnonymous yO7rcec6vuAinda não há avaliações
- CS ASS2 (13-17batch)Documento3 páginasCS ASS2 (13-17batch)Anonymous yO7rcec6vuAinda não há avaliações
- 1F80-361 1F80-361 1F80-361 1F80-361 1F80-361: Description Description Description Description DescriptionDocumento8 páginas1F80-361 1F80-361 1F80-361 1F80-361 1F80-361: Description Description Description Description DescriptiononeAinda não há avaliações
- 3530 3533 BrochureDocumento14 páginas3530 3533 Brochureganeshemmadi1987Ainda não há avaliações
- Literature Review On GSM NetworkDocumento6 páginasLiterature Review On GSM Networkxfeivdsif100% (1)
- Current Affairs Monthly Capsule January 2020 578ae9d7Documento106 páginasCurrent Affairs Monthly Capsule January 2020 578ae9d7Udit PandeyAinda não há avaliações
- University Q Paper ARTIFICIAL-INTELLIGENCE-KME062Documento2 páginasUniversity Q Paper ARTIFICIAL-INTELLIGENCE-KME062Prashant KashyapAinda não há avaliações
- Federalism CLASS - X Well Explained Notes andDocumento23 páginasFederalism CLASS - X Well Explained Notes andSumit Singh100% (3)
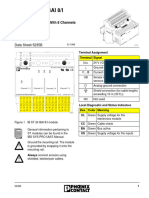
- Ib ST (ZF) 24 Bai 8/I: Analog Input Module With 8 ChannelsDocumento24 páginasIb ST (ZF) 24 Bai 8/I: Analog Input Module With 8 ChannelsJosep Giménez CreixellAinda não há avaliações
- Piccolo Alternate FingeringsDocumento5 páginasPiccolo Alternate FingeringsCatherine Ryann HirabayashiAinda não há avaliações
- Synopsis of Password Generator GUIDocumento12 páginasSynopsis of Password Generator GUIShivam Sharma and crewAinda não há avaliações
- Circular No 9 ABC Unified Directives 2079 PDFDocumento429 páginasCircular No 9 ABC Unified Directives 2079 PDFSachin PangeniAinda não há avaliações
- Catalog: Ordering and Installation GuideDocumento24 páginasCatalog: Ordering and Installation Guideceda013Ainda não há avaliações
- 《每天都梦到死对头在撩我》墨西柯 【原创小说纯爱小说】 晋江文学城Documento1 página《每天都梦到死对头在撩我》墨西柯 【原创小说纯爱小说】 晋江文学城Calli-MiellAinda não há avaliações
- Fundamentals of Deep Learning: Part 2: How A Neural Network TrainsDocumento54 páginasFundamentals of Deep Learning: Part 2: How A Neural Network TrainsPraveen SinghAinda não há avaliações
- 2004 Viking-Excalibur ManualDocumento45 páginas2004 Viking-Excalibur ManualjackAinda não há avaliações
- DubaiCustomsServicesGuide v8 enDocumento49 páginasDubaiCustomsServicesGuide v8 enzeeshan334Ainda não há avaliações
- EEE 5502 Code 5: 1 ProblemDocumento8 páginasEEE 5502 Code 5: 1 ProblemMichael OlveraAinda não há avaliações
- SAIC-A-2005 Rev 8Documento4 páginasSAIC-A-2005 Rev 8Syed ImranAinda não há avaliações
- Self InspectionDocumento20 páginasSelf InspectionGanesh V GaonkarAinda não há avaliações
- Miniature Sensors: Advanced Global Style Miniature Photoelectic SensorDocumento6 páginasMiniature Sensors: Advanced Global Style Miniature Photoelectic SensorFrancisco RamosAinda não há avaliações
- 2020 Interim Rules On Remote Notarization of Paper DocumentsDocumento17 páginas2020 Interim Rules On Remote Notarization of Paper DocumentsKyrillAinda não há avaliações
- Thesis On Power Factor ImprovementDocumento8 páginasThesis On Power Factor ImprovementBrittany Brown100% (2)
- Python Module 1 NotesDocumento39 páginasPython Module 1 Notessushmitha patilAinda não há avaliações
- Remi Butler - 2020 - 1Documento2 páginasRemi Butler - 2020 - 1Remi ButlerAinda não há avaliações
- Ericsson RBS SeriesDocumento2 páginasEricsson RBS SeriesJonattan Da SilvaAinda não há avaliações
- HTML Formatting: 1) Bold TextDocumento18 páginasHTML Formatting: 1) Bold TextSubha SarahAinda não há avaliações
- Bando Product Selector Pages 33 35Documento3 páginasBando Product Selector Pages 33 35Daniele DuarteAinda não há avaliações
- Lesson Plan - Term1, Week 4 (G6)Documento3 páginasLesson Plan - Term1, Week 4 (G6)Miloud Hadj NAASAinda não há avaliações
- Database Programming With PL/SQL 8-3: Practice Activities: Passing ParametersDocumento2 páginasDatabase Programming With PL/SQL 8-3: Practice Activities: Passing ParametersAlan V.B.Ainda não há avaliações
- 8.512.0054 - Exploded View Swift 50BM - BC-C.E. - CTM - 01.2008Documento11 páginas8.512.0054 - Exploded View Swift 50BM - BC-C.E. - CTM - 01.2008Nerijus BarbaraviciusAinda não há avaliações
- AN 396 FTDI Drivers Installation Guide For Windows 10 11Documento30 páginasAN 396 FTDI Drivers Installation Guide For Windows 10 11Ronald FrancoAinda não há avaliações