Você também pode gostar
- 240K C2 3200 25J 049 2HDocumento1 página240K C2 3200 25J 049 2HMario UyfAinda não há avaliações
- 240K C2 3200 25J 002 2Documento1 página240K C2 3200 25J 002 2Mario UyfAinda não há avaliações
- 12-Boletin Cables para Media TensionDocumento36 páginas12-Boletin Cables para Media Tensioncirses2100% (1)
- Evaluacion de Las Recomendaciones Realizadas Por La Contratista de SealDocumento3 páginasEvaluacion de Las Recomendaciones Realizadas Por La Contratista de SealMario UyfAinda não há avaliações
- Cantones 2.2 (T135) A 1.21 (T142)Documento62 páginasCantones 2.2 (T135) A 1.21 (T142)Mario UyfAinda não há avaliações
- Proyecto de Terma ArtesanalDocumento7 páginasProyecto de Terma ArtesanalMario UyfAinda não há avaliações
- 02 - Manejo Simulaciones DinámicasDocumento10 páginas02 - Manejo Simulaciones DinámicaskardraAinda não há avaliações
- Aceite Ecológico FR3Documento2 páginasAceite Ecológico FR3Mario UyfAinda não há avaliações
- Presentacion Arco Interno & ICET 3 PDFDocumento35 páginasPresentacion Arco Interno & ICET 3 PDFMario UyfAinda não há avaliações
- Presentaciones Proyectos - CapacitoresDocumento68 páginasPresentaciones Proyectos - Capacitoresnikolatesla10Ainda não há avaliações
- Tabla de Conversion: Abierta CerradaDocumento4 páginasTabla de Conversion: Abierta CerradaMario UyfAinda não há avaliações
- Clase 01 ME2 - AV PDFDocumento23 páginasClase 01 ME2 - AV PDFMario UyfAinda não há avaliações
- Personal y Moviles Semana 38Documento4 páginasPersonal y Moviles Semana 38Mario UyfAinda não há avaliações
- Manual de Practicas de ATPDraw PDFDocumento12 páginasManual de Practicas de ATPDraw PDFCamiloAinda não há avaliações
- Cantones 2.2 (T135) A 1.21 (T142)Documento62 páginasCantones 2.2 (T135) A 1.21 (T142)Mario UyfAinda não há avaliações
- Carta #PD-ST-2015-190Documento1 páginaCarta #PD-ST-2015-190Mario UyfAinda não há avaliações
- Fechas Finales: Abierta CerradaDocumento39 páginasFechas Finales: Abierta CerradaMario UyfAinda não há avaliações
- Fechas Finales: Abierta CerradaDocumento39 páginasFechas Finales: Abierta CerradaMario UyfAinda não há avaliações
- Planilla Plan de Tendido Tramo 387 - 399 Rev2Documento1 páginaPlanilla Plan de Tendido Tramo 387 - 399 Rev2Mario UyfAinda não há avaliações
- Constancia SCTR - Pension - Civil 31-09-2015Documento3 páginasConstancia SCTR - Pension - Civil 31-09-2015Mario UyfAinda não há avaliações
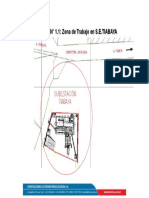
- Zonas de TrabajoDocumento1 páginaZonas de TrabajoMario UyfAinda não há avaliações
- Libro 1Documento6 páginasLibro 1Mario UyfAinda não há avaliações
- Zonas de TrabajoDocumento1 páginaZonas de TrabajoMario UyfAinda não há avaliações
- Planilla Plan de Tendido Tramo 387 - 399Documento1 páginaPlanilla Plan de Tendido Tramo 387 - 399Mario UyfAinda não há avaliações
- Plan Semana 38Documento13 páginasPlan Semana 38Mario UyfAinda não há avaliações
- Cuerda de Aleacion de Aluminio AaacDocumento2 páginasCuerda de Aleacion de Aluminio AaacNeil CordovaAinda não há avaliações
- Carta #PD-ST-2015-190Documento1 páginaCarta #PD-ST-2015-190Mario UyfAinda não há avaliações
- Carta #PD-ST-2015-209 Cronograma RegantesDocumento3 páginasCarta #PD-ST-2015-209 Cronograma RegantesMario UyfAinda não há avaliações
- Reporte de Información Supervisores 04-05-01-2014Documento3 páginasReporte de Información Supervisores 04-05-01-2014Mario UyfAinda não há avaliações
- Informe N1 OPE Fina.Documento30 páginasInforme N1 OPE Fina.Cesia Molina CastilloAinda não há avaliações
- 3er - EXAMEN PARCIAL IME 2020-2Documento2 páginas3er - EXAMEN PARCIAL IME 2020-2José Carlos González LoraAinda não há avaliações
- Electricidad Del Automóvil 2 ParteDocumento4 páginasElectricidad Del Automóvil 2 ParteghossAinda não há avaliações
- Gases RealesDocumento3 páginasGases RealesDiianiitha BaEzaAinda não há avaliações
- Propiedades Elasticas de La Fibra de Alpaca Sometido Al Envejecimiento ArtificialDocumento6 páginasPropiedades Elasticas de La Fibra de Alpaca Sometido Al Envejecimiento ArtificialAngel AlmanzaAinda não há avaliações
- Tabla de Formulas de Fisica III Movimiento Oscilatorio y OndasDocumento5 páginasTabla de Formulas de Fisica III Movimiento Oscilatorio y OndasGalo Antonio Arellano CastilloAinda não há avaliações
- Aproximación de Los Equipos TopográficosDocumento5 páginasAproximación de Los Equipos TopográficosMIGUEL ANDRES PERDOMO VALENCIAAinda não há avaliações
- La Guía AASHTO-72Documento88 páginasLa Guía AASHTO-72Felix Fernandez100% (1)
- Clase 01 Teoria RADIOLOGIADocumento50 páginasClase 01 Teoria RADIOLOGIACc LeoAinda não há avaliações
- Automatizacion Pintura en PolvoDocumento4 páginasAutomatizacion Pintura en PolvoSebastian Enrique Perea PrietoAinda não há avaliações
- Manual Vims 3g.Documento78 páginasManual Vims 3g.Wilson Claveria100% (5)
- P&IDDocumento25 páginasP&IDReyner Loza100% (1)
- PracticaDocumento13 páginasPracticaELIZABETH QUISPE HUAMANIAinda não há avaliações
- Jara Empresa de TermocuplasDocumento16 páginasJara Empresa de TermocuplasNestor AquinoAinda não há avaliações
- TALLERESDocumento4 páginasTALLERESmanuel417726Ainda não há avaliações
- Alineamiento Láser Ejes MáquinasDocumento14 páginasAlineamiento Láser Ejes MáquinasBladimir Jesus Vasquez AlaveAinda não há avaliações
- Asignatura: EstructurasDocumento33 páginasAsignatura: EstructurasMARTINA ISIDORA VARGAS ARRIAGADAAinda não há avaliações
- Cuadro Comparativo Transferencia de CalorDocumento1 páginaCuadro Comparativo Transferencia de Calordaniel acosta0% (1)
- Taller 4 Derivadas 1Documento2 páginasTaller 4 Derivadas 1Euge CompagnoniAinda não há avaliações
- El Cartílago Articular: Aspectos Mecánicos y Su Repercusión en La Reparación TisularDocumento11 páginasEl Cartílago Articular: Aspectos Mecánicos y Su Repercusión en La Reparación TisularYEISON NICOLAS URREGO ACOSTAAinda não há avaliações
- FISICADocumento2 páginasFISICALuis Alejandro Chuquipoma MarínAinda não há avaliações
- Aleaccion AcanaladoDocumento2 páginasAleaccion Acanaladoadolfo vecino ponsAinda não há avaliações
- Traqueos Latigazos (14!08!17)Documento22 páginasTraqueos Latigazos (14!08!17)allstar0830.blogspot.comAinda não há avaliações
- Calentamiento en Un Sistama TribologicoDocumento6 páginasCalentamiento en Un Sistama TribologicoLeonardo RomoAinda não há avaliações
- Taller Curvas de InmunidadDocumento6 páginasTaller Curvas de InmunidadFercho RamirezAinda não há avaliações
- Log I/I =Εcb: Leyes Fundamentales De La FotometriaDocumento21 páginasLog I/I =Εcb: Leyes Fundamentales De La FotometriaMarcio ArteagaAinda não há avaliações
- Introducción Extracción Del ADNDocumento2 páginasIntroducción Extracción Del ADNAlejandra TKTAinda não há avaliações
- 1-Raz Mat (1 - 6)Documento34 páginas1-Raz Mat (1 - 6)Juan Jose Tello0% (1)
- Tarea 1 Unidad 5 Fisica BasicaDocumento2 páginasTarea 1 Unidad 5 Fisica BasicaRichard Ayseck De La Rosa DotelAinda não há avaliações
- B76 Ejercicios Combinados CuatroDocumento12 páginasB76 Ejercicios Combinados CuatroRicardoAinda não há avaliações