Você também pode gostar
- FDA Food - Code 2017 PDFDocumento767 páginasFDA Food - Code 2017 PDFfitri widyaAinda não há avaliações
- Review of MEP Textbooks FinalDocumento10 páginasReview of MEP Textbooks FinalvickyAinda não há avaliações
- Review of MEP Textbooks FinalDocumento10 páginasReview of MEP Textbooks FinalvickyAinda não há avaliações
- Short Circuit Calculation GuideDocumento5 páginasShort Circuit Calculation Guideashok203Ainda não há avaliações
- Carrier - Rtu - 4 8 F C Da 0 4 A 2 A 5 - 0 A 0 A 0Documento158 páginasCarrier - Rtu - 4 8 F C Da 0 4 A 2 A 5 - 0 A 0 A 0Chandra ClarkAinda não há avaliações
- Rheem Prestige Series Package Gas Electric UnitDocumento36 páginasRheem Prestige Series Package Gas Electric UnitChandra ClarkAinda não há avaliações
- Milbank - U5300 O 75Documento2 páginasMilbank - U5300 O 75Chandra ClarkAinda não há avaliações
- Commercial Product Specifications: Packaged Gas / ElectricDocumento48 páginasCommercial Product Specifications: Packaged Gas / ElectricChandra ClarkAinda não há avaliações
- Won't Crack. - . It Just Stretches: Technical DataDocumento2 páginasWon't Crack. - . It Just Stretches: Technical DataChandra ClarkAinda não há avaliações
- Electrical CodeDocumento11 páginasElectrical CodeChandra ClarkAinda não há avaliações
- Short Circuit Calculation GuideDocumento5 páginasShort Circuit Calculation Guideashok203Ainda não há avaliações
- Duct FittingsDocumento31 páginasDuct FittingsSam Jose100% (7)
- TB08104003E Tab 1Documento152 páginasTB08104003E Tab 1priyanka236Ainda não há avaliações
- Electrical Symbols CS: PVC Film, On SheetDocumento13 páginasElectrical Symbols CS: PVC Film, On SheetChandra ClarkAinda não há avaliações
- 50 Powerful Sales QuestionsDocumento19 páginas50 Powerful Sales QuestionsChandra Clark100% (2)
- What Is A One-Pager?: - E.M. Forster "Only Connect." - E.M. ForsterDocumento1 páginaWhat Is A One-Pager?: - E.M. Forster "Only Connect." - E.M. ForsterChandra Clark100% (1)
- Tensor AnalysisDocumento30 páginasTensor AnalysisChandra ClarkAinda não há avaliações
- Waves 2008 11 26Documento20 páginasWaves 2008 11 26Chandra ClarkAinda não há avaliações
- IELTS Life Skills - Sample Paper A Level A1 PDFDocumento4 páginasIELTS Life Skills - Sample Paper A Level A1 PDFAnonymous QRT4uuQ100% (1)
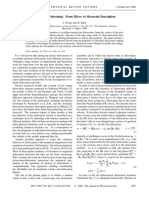
- Groma Bako PhysRevLet 2000Documento4 páginasGroma Bako PhysRevLet 2000Chandra ClarkAinda não há avaliações
- Biscay: Tentative Forward ScheduleDocumento5 páginasBiscay: Tentative Forward ScheduleChandra ClarkAinda não há avaliações
- Modeling Texture, Twinning and HardeningDocumento25 páginasModeling Texture, Twinning and HardeningChandra ClarkAinda não há avaliações
- ANSYS Release Notes 190 PDFDocumento146 páginasANSYS Release Notes 190 PDFAle100% (1)
- Konsep Sistem InformasiDocumento30 páginasKonsep Sistem InformasiNijar SetiadyAinda não há avaliações
- Modeling Texture, Twinning and Hardening PDFDocumento12 páginasModeling Texture, Twinning and Hardening PDFChandra ClarkAinda não há avaliações
- Foundations of Tensor Analysis For Students of Physics and Engineering With An Introduction To Theory of Relativity (Nasa)Documento92 páginasFoundations of Tensor Analysis For Students of Physics and Engineering With An Introduction To Theory of Relativity (Nasa)Silver Olguín CamachoAinda não há avaliações
- ASME & IEEE Engineering Career Fair - Information Package v11Documento2 páginasASME & IEEE Engineering Career Fair - Information Package v11Chandra ClarkAinda não há avaliações
- Physics and Phenomenology of Strain Hardening The FCC Case PDFDocumento103 páginasPhysics and Phenomenology of Strain Hardening The FCC Case PDFChandra ClarkAinda não há avaliações
- Solid Mechanics 94 10Documento89 páginasSolid Mechanics 94 10landatoAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- 569 - PR 2-2 - Dirac Particle in Uniform Magnetic FieldDocumento2 páginas569 - PR 2-2 - Dirac Particle in Uniform Magnetic FieldBradley NartowtAinda não há avaliações
- Aime 2000iDocumento2 páginasAime 2000ianantyantoAinda não há avaliações
- Linear AlgebraDocumento5 páginasLinear Algebracarminavelasco21Ainda não há avaliações
- Inverse Trigonometric Function: Multiple Choice QuestionsDocumento6 páginasInverse Trigonometric Function: Multiple Choice QuestionsabcdAinda não há avaliações
- Lossy Circular WaveguideDocumento6 páginasLossy Circular WaveguideParas KumarAinda não há avaliações
- Sample 5e Lesson PlanDocumento12 páginasSample 5e Lesson Planapi-513390094Ainda não há avaliações
- Chapter 8 A HandoutDocumento12 páginasChapter 8 A HandoutSojol KumarAinda não há avaliações
- 2022 Amc 12b Problems and AnswersDocumento12 páginas2022 Amc 12b Problems and AnswersSuragaAinda não há avaliações
- CalcAnswersCh7 Nswers To Exercises For Chapter 7 Logarithmic and Exponential Functions PDFDocumento7 páginasCalcAnswersCh7 Nswers To Exercises For Chapter 7 Logarithmic and Exponential Functions PDFMd Ibrahim MollaAinda não há avaliações
- Notas 4 - 2 Sep - Mapeos Entre Variedades 1Documento3 páginasNotas 4 - 2 Sep - Mapeos Entre Variedades 1Daniel MedelAinda não há avaliações
- Rayleigh-Lamb PDF Rev2Documento6 páginasRayleigh-Lamb PDF Rev2Ben DanielsAinda não há avaliações
- Programming in MatlabDocumento52 páginasProgramming in MatlabAgnibha BanerjeeAinda não há avaliações
- Finite Element Analysis of 1D Structural Systems Using Higher Order ElementsDocumento77 páginasFinite Element Analysis of 1D Structural Systems Using Higher Order ElementsfefahimAinda não há avaliações
- NMCP Unit 6Documento3 páginasNMCP Unit 6Shashikant PrasadAinda não há avaliações
- Chap 01Documento66 páginasChap 01Gaurav HarshaAinda não há avaliações
- Calculus100 Mean Value Theorem Worksheet With Answers PDFDocumento2 páginasCalculus100 Mean Value Theorem Worksheet With Answers PDFShan XinAinda não há avaliações
- Analytical Geometry For BeginnersDocumento234 páginasAnalytical Geometry For Beginnersscubadru100% (3)
- An active angle stability circuit reference for power line resistanceDocumento9 páginasAn active angle stability circuit reference for power line resistanceRebeca VargasAinda não há avaliações
- VibrationDocumento468 páginasVibrationaklamosAinda não há avaliações
- CHAPTER 3 Transportatiofor Night ClassDocumento10 páginasCHAPTER 3 Transportatiofor Night ClassHACHALU FAYE100% (1)
- Nonlinear Nonparametric Statistics: Using Partial MomentsDocumento101 páginasNonlinear Nonparametric Statistics: Using Partial MomentsOVVOFinancialSystems100% (2)
- Discrete Mathematics Prelims Quiz 2 by BertskiDocumento5 páginasDiscrete Mathematics Prelims Quiz 2 by BertskiNicoco Loco100% (1)
- Craig NoteDocumento226 páginasCraig NoteMd. Tanvir HossainAinda não há avaliações
- Kertas Trial Addmath MRSM K1 2021 SkemaDocumento48 páginasKertas Trial Addmath MRSM K1 2021 SkemaRyan YongAinda não há avaliações
- CAPE 2006 PureMathematicsDocumento30 páginasCAPE 2006 PureMathematicsNefta BaptisteAinda não há avaliações
- MATH-110 Multivariate CalculusDocumento2 páginasMATH-110 Multivariate CalculusBilal AnwarAinda não há avaliações
- BMS4-OR-PDF3 (Part 2) - Assignment (1271) PDFDocumento15 páginasBMS4-OR-PDF3 (Part 2) - Assignment (1271) PDFKanishka SihareAinda não há avaliações
- Applications of Differential and Difference EquationsDocumento177 páginasApplications of Differential and Difference EquationsEswar RcfAinda não há avaliações
- Full Download Ebook Ebook PDF Numerical Mathematics and Computing 7th Edition by e Ward Cheney PDFDocumento41 páginasFull Download Ebook Ebook PDF Numerical Mathematics and Computing 7th Edition by e Ward Cheney PDFmyra.gordon71297% (38)
- Basic College Mathematics An Applied Approach 9th Edition Aufmann Solutions Manual 1Documento89 páginasBasic College Mathematics An Applied Approach 9th Edition Aufmann Solutions Manual 1james100% (36)