Você também pode gostar
- Energía Eólica. Integración a la red eléctricaNo EverandEnergía Eólica. Integración a la red eléctricaNota: 3.5 de 5 estrelas3.5/5 (4)
- MF1161_3 - Electrotécnia para instalaciones térmicasNo EverandMF1161_3 - Electrotécnia para instalaciones térmicasAinda não há avaliações
- Método de Runge Kutta en MatlabDocumento13 páginasMétodo de Runge Kutta en MatlabElvimarAinda não há avaliações
- Ejercicios de Newton RaphsonDocumento14 páginasEjercicios de Newton Raphsonaliconac100% (1)
- Aplicacion Metodos Numericos A Flujos de PotenciaDocumento5 páginasAplicacion Metodos Numericos A Flujos de PotenciaAlfre OrtegaAinda não há avaliações
- Matlab - Calculo de Matriz Impedancia y Admitancia.Documento16 páginasMatlab - Calculo de Matriz Impedancia y Admitancia.Cristóbal Cárdenas CabezaAinda não há avaliações
- Método de Newton-Raphson para Sistemas de Ecuaciones No LinealesDocumento9 páginasMétodo de Newton-Raphson para Sistemas de Ecuaciones No LinealesArmando LaraAinda não há avaliações
- Solucion de Ecuaciones Diferenciales Metodo de Runge KuttaDocumento35 páginasSolucion de Ecuaciones Diferenciales Metodo de Runge KuttaLuis-adrian Ullaure Paisij0% (1)
- Trabajo Final Metodo de Runge KuttaDocumento5 páginasTrabajo Final Metodo de Runge KuttaJose Marcos100% (1)
- Funciones Rampa, EscalonDocumento4 páginasFunciones Rampa, EscalonMisael Gómez100% (1)
- Análisis de FallasDocumento18 páginasAnálisis de FallasANGEL ELIUD FLORES MONROYAinda não há avaliações
- Método de Heun Con Ejemplo en MATLABDocumento5 páginasMétodo de Heun Con Ejemplo en MATLABmiau0% (1)
- Errores y Series de TaylorDocumento34 páginasErrores y Series de TaylorMontoya JoseAinda não há avaliações
- Ecuaciones No Lineales IntroduccionDocumento7 páginasEcuaciones No Lineales IntroduccionElber Dante CruzAinda não há avaliações
- Polinomio de Interpolación de NewtonDocumento3 páginasPolinomio de Interpolación de NewtonKewin Sánchez SánchezAinda não há avaliações
- Series de Bessel y LegendreDocumento30 páginasSeries de Bessel y LegendreLaura FlórezAinda não há avaliações
- Metodos NumericosDocumento10 páginasMetodos NumericosJesusAinda não há avaliações
- Práctica-2-Impulso y Escalon UnitarioDocumento10 páginasPráctica-2-Impulso y Escalon UnitarioIrvingLopezAinda não há avaliações
- Propiedades Electricas, Termicas y Magneticas de Los MaterialesDocumento5 páginasPropiedades Electricas, Termicas y Magneticas de Los MaterialesLeonel Flores Castro100% (4)
- Metodo de Newton Raphson, ProfeDocumento8 páginasMetodo de Newton Raphson, ProfeFrankSiancasRosalesAinda não há avaliações
- Aplicaciones de Ecuaciones DiferencialesDocumento4 páginasAplicaciones de Ecuaciones DiferencialesJhon Callejas Bejarano100% (1)
- Proyecto Ecuaciones Diferenciales de Orden SuperiorDocumento3 páginasProyecto Ecuaciones Diferenciales de Orden SuperiorANDRES CASTRO QUIROZAinda não há avaliações
- Metodo de BiseccionDocumento8 páginasMetodo de BiseccionFernando Rodríguez CaroAinda não há avaliações
- Metodo de Euler y Euler MejoradoDocumento16 páginasMetodo de Euler y Euler MejoradoWilson Sarmiento100% (1)
- UNIDAD 7 Montaje y Tecnicas de AlineacionDocumento10 páginasUNIDAD 7 Montaje y Tecnicas de AlineacionJesus GarcíaAinda não há avaliações
- Analizador de Redes Electricas Monofasic PDFDocumento92 páginasAnalizador de Redes Electricas Monofasic PDFMiriam Elisa Del CarrilAinda não há avaliações
- Flujos de PotenciaDocumento30 páginasFlujos de PotenciaJessoccer0% (1)
- CUADRATURA GAUSSIANA noPWDocumento8 páginasCUADRATURA GAUSSIANA noPWAlberto OrtizAinda não há avaliações
- FALLAS ASIMETRICAS (Para Presentar)Documento48 páginasFALLAS ASIMETRICAS (Para Presentar)Rene BenavidesAinda não há avaliações
- Esta Bili DadDocumento89 páginasEsta Bili DadMartinAinda não há avaliações
- Control RobustoDocumento71 páginasControl RobustoExequiel100% (1)
- Series de Fourier JorgeDocumento20 páginasSeries de Fourier JorgeJorge Manuel Dionicio RodriguezAinda não há avaliações
- Trabjo Encargado Metodo de Runge KuttaDocumento16 páginasTrabjo Encargado Metodo de Runge KuttaYalile Benite GarciaAinda não há avaliações
- Respuesta en Sistema de Primer Orden Con Escalon UnitarioDocumento6 páginasRespuesta en Sistema de Primer Orden Con Escalon UnitarioDaisy GutiérrezAinda não há avaliações
- Metodo de Euler MejoradoDocumento6 páginasMetodo de Euler MejoradoOmar ZamoraAinda não há avaliações
- Aplicaciones de Raices de EcuacionesDocumento6 páginasAplicaciones de Raices de EcuacionesEiter Antonio SantiagoAinda não há avaliações
- Metodo Runge Kutta - Gabriela La ToreDocumento10 páginasMetodo Runge Kutta - Gabriela La ToreGabriela La TorreAinda não há avaliações
- Práctica 7 - Solución de Sistemas de Ecuaciones LinealesDocumento11 páginasPráctica 7 - Solución de Sistemas de Ecuaciones LinealesYair Torres MariscalAinda não há avaliações
- Perdidas Por Fricción en Tuberías Con Flujo LaminarDocumento14 páginasPerdidas Por Fricción en Tuberías Con Flujo LaminarChristian RiveraAinda não há avaliações
- Metodo Series Taylor Resolver Ecuaciones Diferenciales Lineales y No LinealesDocumento37 páginasMetodo Series Taylor Resolver Ecuaciones Diferenciales Lineales y No LinealesIvan Ronald ARAinda não há avaliações
- Conceptos Básicos de Física NuclearDocumento21 páginasConceptos Básicos de Física Nuclearkevin quirozAinda não há avaliações
- Trayectorias Ortogonales FinalDocumento32 páginasTrayectorias Ortogonales FinalCarlos Carranza100% (1)
- 4 11 Divergencia Rotacional Interpretacion Geometrica y FisicaDocumento6 páginas4 11 Divergencia Rotacional Interpretacion Geometrica y FisicaNicolasHcAinda não há avaliações
- Seminario #2 Estimacion de EstadoDocumento26 páginasSeminario #2 Estimacion de EstadoTomas Roa100% (1)
- Sistemas de Ecuaciones Diferenciales PDFDocumento12 páginasSistemas de Ecuaciones Diferenciales PDFLizbeth ZarateAinda não há avaliações
- Dispositivos Semiconductores de PotenciaDocumento66 páginasDispositivos Semiconductores de PotenciaJoseMartinezAinda não há avaliações
- Trabajo de Metodos NumericosDocumento57 páginasTrabajo de Metodos NumericosHarold Carhuapoma PeñaAinda não há avaliações
- Método de Euler y Euler ModificadoDocumento7 páginasMétodo de Euler y Euler ModificadoFrancisco MagañaAinda não há avaliações
- MCuántica1 2Documento68 páginasMCuántica1 2Katherin Yesica Escarcena100% (1)
- Redes de SecuenciaDocumento40 páginasRedes de Secuenciaandrez880103Ainda não há avaliações
- Laboratorio #5 de Métodos Numéricos - Método de La SecanteDocumento8 páginasLaboratorio #5 de Métodos Numéricos - Método de La SecanteErick SerranoAinda não há avaliações
- Practica 06 SIMULINKDocumento10 páginasPractica 06 SIMULINKJean Carlos QvisPeAinda não há avaliações
- 4.1. Matriz de Impedancia y Admitancia de BarraDocumento32 páginas4.1. Matriz de Impedancia y Admitancia de BarraToño Sarmiento Franco0% (1)
- Gauss Jordan Gauss SeidelDocumento14 páginasGauss Jordan Gauss SeidelJorge91% (11)
- Analogías de Función de TransferenciaDocumento10 páginasAnalogías de Función de TransferenciaMauricioFernándezAinda não há avaliações
- Resoluciones de Ejercicios de Métodos NuméricosDocumento7 páginasResoluciones de Ejercicios de Métodos NuméricosAngel PeraltaAinda não há avaliações
- Trabajo de Runge Kuttaa FinalDocumento18 páginasTrabajo de Runge Kuttaa Finaleduardoorday100% (1)
- RUNGE KUTTA 4 OrdenDocumento28 páginasRUNGE KUTTA 4 OrdenMarco CGAinda não há avaliações
- Efecto Gobernador Con Error de Control de ÁreaDocumento18 páginasEfecto Gobernador Con Error de Control de ÁreaAlex SanchezAinda não há avaliações
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoNo EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoAinda não há avaliações
- Lectura N 8Documento16 páginasLectura N 8vmromerorAinda não há avaliações
- Consult de Obras No Convocadas 2013Documento582 páginasConsult de Obras No Convocadas 2013ItaloUlloaGuarnizAinda não há avaliações
- Lectura N 8Documento2 páginasLectura N 8vmromerorAinda não há avaliações
- Precio de TransporteDocumento2 páginasPrecio de TransportevmromerorAinda não há avaliações
- SEPARADORESDocumento8 páginasSEPARADORESvmromerorAinda não há avaliações
- SEPARADORESDocumento8 páginasSEPARADORESvmromerorAinda não há avaliações
- Formulación de Proyectos TemarioDocumento15 páginasFormulación de Proyectos TemariovmromerorAinda não há avaliações
- II Examen SubestacionesDocumento1 páginaII Examen SubestacionesBryanJamesArroyoVerasteguiAinda não há avaliações
- Semana 1Documento23 páginasSemana 1vmromerorAinda não há avaliações
- ContenidoDocumento37 páginasContenidovmromerorAinda não há avaliações
- Método TrapezoidalDocumento38 páginasMétodo TrapezoidalvmromerorAinda não há avaliações
- Control de VelocidadDocumento1 páginaControl de VelocidadvmromerorAinda não há avaliações
- II Examen SubestacionesDocumento1 páginaII Examen SubestacionesBryanJamesArroyoVerasteguiAinda não há avaliações
- Formulación de Proyectos TemarioDocumento15 páginasFormulación de Proyectos TemariovmromerorAinda não há avaliações
- Despacho Econ Mico ComplementoDocumento19 páginasDespacho Econ Mico ComplementovmromerorAinda não há avaliações
- Anal Dina Estabi Ten SEPDocumento120 páginasAnal Dina Estabi Ten SEPOmarMatSlsAinda não há avaliações
- 2.2.-Diagrama de NyquistCOORDocumento21 páginas2.2.-Diagrama de NyquistCOORjoeluncp100% (1)
- MaquinaDocumento4 páginasMaquinavmromerorAinda não há avaliações
- Despacho TermicoDocumento7 páginasDespacho TermicoDaniel Nuñez FalconAinda não há avaliações
- Ejercicios de Despacho EconomicoDocumento152 páginasEjercicios de Despacho EconomicoLuis Millan Cahuana0% (1)
- Ejercicios de Despacho EconomicoDocumento6 páginasEjercicios de Despacho EconomicovmromerorAinda não há avaliações
- MaquinaDocumento4 páginasMaquinavmromerorAinda não há avaliações
- Control Automatico 1Documento9 páginasControl Automatico 1vmromerorAinda não há avaliações
- 00 Formulacion de ProyectosDocumento68 páginas00 Formulacion de ProyectosvmromerorAinda não há avaliações
- Traduccion 20 5al20 9Documento5 páginasTraduccion 20 5al20 9vmromerorAinda não há avaliações
- FERNADITODocumento2 páginasFERNADITOvmromerorAinda não há avaliações
- Traduccion 20 5al20 9Documento5 páginasTraduccion 20 5al20 9vmromerorAinda não há avaliações
- HUAYLARSHDocumento1 páginaHUAYLARSHvmromerorAinda não há avaliações
- Control de VelocidadDocumento1 páginaControl de VelocidadvmromerorAinda não há avaliações
- Discusión de ResultadosDocumento5 páginasDiscusión de ResultadosMarina Gomez PinedoAinda não há avaliações
- Protocolo Limpieza Mejillon - Nov2019para WebDocumento16 páginasProtocolo Limpieza Mejillon - Nov2019para WebALEJANDRO GOMEZ MARTINEZAinda não há avaliações
- Criminología - Gestos TipoDocumento7 páginasCriminología - Gestos TipoGildrydAinda não há avaliações
- Polígonos Perímetros y ÁreasDocumento1 páginaPolígonos Perímetros y Áreaschicharro1977Ainda não há avaliações
- Sistemas de Puesta A TierraDocumento18 páginasSistemas de Puesta A TierraJosé SosaAinda não há avaliações
- AATCC 61 Solidez Al Lavado EspDocumento5 páginasAATCC 61 Solidez Al Lavado EspCALIDAD MABRATEX100% (2)
- EKS y ECOSDocumento28 páginasEKS y ECOSJorge Cardona100% (5)
- GUID - 2 - en-US TradDocumento3 páginasGUID - 2 - en-US TradCataAinda não há avaliações
- Actividad 6 Fisica NewDocumento10 páginasActividad 6 Fisica NewJose ParraAinda não há avaliações
- Laboratorio 8 - Quimica Organica IiDocumento7 páginasLaboratorio 8 - Quimica Organica IiAndrea JimenezAinda não há avaliações
- ALIMAKDocumento41 páginasALIMAKIsaac Chavez NavarroAinda não há avaliações
- La Geología Histórica Se Ocupa de La Reconstrucción Del Pasado de LaDocumento2 páginasLa Geología Histórica Se Ocupa de La Reconstrucción Del Pasado de LaLucía Cazalla De la BarreraAinda não há avaliações
- Poka YokeDocumento56 páginasPoka YokecarlosAinda não há avaliações
- Actividad 5 - Ecuaciones Lineales y Sistemas 2x2Documento12 páginasActividad 5 - Ecuaciones Lineales y Sistemas 2x2Martha Elena Gómez100% (1)
- Pregunta 9Documento3 páginasPregunta 9Stephanie SegoviaAinda não há avaliações
- Guia-22Documento11 páginasGuia-22CarlosAinda não há avaliações
- En La Vida de Una Tormenta OrdinariaDocumento1 páginaEn La Vida de Una Tormenta OrdinariaEstefania ZaldivarAinda não há avaliações
- Dia 04 - Matematica SimetriaDocumento11 páginasDia 04 - Matematica SimetriaALICIA HUAYTA GARCIAAinda não há avaliações
- Matemáticas IIDocumento15 páginasMatemáticas IIerico_rAinda não há avaliações
- Proceso Constructivo Una Casa - Taller ViDocumento66 páginasProceso Constructivo Una Casa - Taller ViJASMIN NICOLLE LLACSA QUISPEAinda não há avaliações
- NCh-ISO 22117-2013-043 PDFDocumento41 páginasNCh-ISO 22117-2013-043 PDFSandra RamirezAinda não há avaliações
- Movimiento Circular Uniforme para El AlumnoDocumento6 páginasMovimiento Circular Uniforme para El AlumnoMendel CcdAinda não há avaliações
- Estructuras Ii - Materiales EstructuralesDocumento18 páginasEstructuras Ii - Materiales EstructuralesVicky TroyaAinda não há avaliações
- Inversor Hibrido 3000 A 24 - 110V-2 PDFDocumento2 páginasInversor Hibrido 3000 A 24 - 110V-2 PDFSebas BuitragoAinda não há avaliações
- Junkers Hydronet-5700sDocumento40 páginasJunkers Hydronet-5700sMiquel Femenias FerriolAinda não há avaliações
- Tarea 3 - Modelado y Simulacion Aporte IndividualDocumento11 páginasTarea 3 - Modelado y Simulacion Aporte Individualricardo fernandezAinda não há avaliações
- Cuerpos Geometricos 3D Semana 14Documento26 páginasCuerpos Geometricos 3D Semana 14Joel Arias EncisoAinda não há avaliações
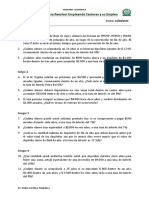
- TAREA02: para Resolver Empleando Factores y Su Empleo: VIII Ciclo "A" Fecha: 24/08/2020 Grupo 1Documento3 páginasTAREA02: para Resolver Empleando Factores y Su Empleo: VIII Ciclo "A" Fecha: 24/08/2020 Grupo 1WALDO ADRIAN MAGALLANES PACHASAinda não há avaliações
- 9.2.2.7 Packet Tracer - Configuring Multiarea OSPFv3 InstructionsDocumento2 páginas9.2.2.7 Packet Tracer - Configuring Multiarea OSPFv3 InstructionsameliaAinda não há avaliações
- IndiceDocumento4 páginasIndiceraulraul82Ainda não há avaliações