Você também pode gostar
- Transformaciones LinealesDocumento13 páginasTransformaciones Linealesleticia amaro100% (6)
- 5.1 Introducción A Las Transformaciones Lineales.Documento15 páginas5.1 Introducción A Las Transformaciones Lineales.Maritza GuadalupeAinda não há avaliações
- Unidad 5 Transformaciones LinealesDocumento16 páginasUnidad 5 Transformaciones LinealesMiathzireri Reyes100% (1)
- Transformaciones lineales: Definición y propiedadesDocumento8 páginasTransformaciones lineales: Definición y propiedadesfrancisco javier de la cruz reyesAinda não há avaliações
- Ensayo - Transformaciones LinealesDocumento13 páginasEnsayo - Transformaciones LinealesJanet CalderaAinda não há avaliações
- Introducción a las transformaciones linealesDocumento18 páginasIntroducción a las transformaciones linealesStephany ScottAinda não há avaliações
- Aplicación de Las Transformaciones LinealesDocumento9 páginasAplicación de Las Transformaciones LinealesKattia Jeraldine Uitzil Yam100% (1)
- Transformaciones LinealesDocumento13 páginasTransformaciones LinealesGerardo Abad100% (3)
- Representación Matricial de Una Transformación LinealDocumento1 páginaRepresentación Matricial de Una Transformación LinealDiego Armando RodríguezAinda não há avaliações
- Núcleo e imagen de una transformación lineal: menos deDocumento2 páginasNúcleo e imagen de una transformación lineal: menos deBaby Home100% (1)
- Unidad 5 Transformaciones Lineales PDFDocumento17 páginasUnidad 5 Transformaciones Lineales PDFVladimir Blancas Martinez100% (1)
- Vectores en 3D: Definición, representación geométrica y cálculo de magnitudDocumento34 páginasVectores en 3D: Definición, representación geométrica y cálculo de magnitudHugo Hdz50% (8)
- 4.4 Derivadas Parciales de Funciones de Varias Variables y Su Interpretación Geométrica.Documento16 páginas4.4 Derivadas Parciales de Funciones de Varias Variables y Su Interpretación Geométrica.Juan Mcfly Badillo100% (6)
- 1.6 Ecuaciones PolinomicasDocumento2 páginas1.6 Ecuaciones Polinomicasmaikvai100% (1)
- Ecuacion Diferencial 4.2Documento29 páginasEcuacion Diferencial 4.2Flor Samantha FranciscoAinda não há avaliações
- Representación matricial T lineal Rn-RmDocumento14 páginasRepresentación matricial T lineal Rn-RmDaniel CisnerosAinda não há avaliações
- IntImpropiasDocumento43 páginasIntImpropiasManuel Quezada EstradaAinda não há avaliações
- Aplicación de Las Transformaciones Lineales Reflexión, Dilatación, Contracción y Rotación.Documento5 páginasAplicación de Las Transformaciones Lineales Reflexión, Dilatación, Contracción y Rotación.RodrigoGarcia100% (2)
- 3.2 Clasificación de Los Sistemas de Ecuaciones Lineales y Tipos de SoluciónDocumento5 páginas3.2 Clasificación de Los Sistemas de Ecuaciones Lineales y Tipos de SoluciónDacroman CromanAinda não há avaliações
- 3.1 Definicion de Función Vectorial de Una Variable RealDocumento2 páginas3.1 Definicion de Función Vectorial de Una Variable RealJuan Mcfly Badillo50% (4)
- Rango y Nucleo de Una MatrizDocumento3 páginasRango y Nucleo de Una MatrizEnger50% (2)
- Definición de Subespacio Vectorial y Sus PropiedadesDocumento2 páginasDefinición de Subespacio Vectorial y Sus PropiedadesKati Fernadez Reyes50% (2)
- 3.1 Definición de Función Vectorial de Una Variable RealDocumento45 páginas3.1 Definición de Función Vectorial de Una Variable RealmoisesAinda não há avaliações
- Unidad 4 Cálculo Vectorial Funciones Reales de Varias VariablesDocumento19 páginasUnidad 4 Cálculo Vectorial Funciones Reales de Varias VariablesJennifer Zazueta100% (1)
- Calculo Vectorial Unidad 2Documento25 páginasCalculo Vectorial Unidad 2Hugo Hdz80% (5)
- Calculo Integral Unidad 4 SeriesDocumento29 páginasCalculo Integral Unidad 4 SeriesRuben G. Orozco67% (6)
- Transformaciones LinealesDocumento11 páginasTransformaciones LinealesvarceAinda não há avaliações
- 1.6 Ecuaciones Polinómicas.Documento2 páginas1.6 Ecuaciones Polinómicas.Javier Ps67% (3)
- Aplicaciones Reales de Las Transformaciones Lineales en IngenieríaDocumento6 páginasAplicaciones Reales de Las Transformaciones Lineales en IngenieríaLuis Eduardo Rivera Moreno100% (1)
- 2.3.6 Fracciones ParcialesDocumento4 páginas2.3.6 Fracciones ParcialesIvonne Bx100% (1)
- Transformacion LinealDocumento10 páginasTransformacion LinealJesus PradoAinda não há avaliações
- 1.5 Teorema de de Moivre, Potencias y Extracción de Raíces de Un Número ComplejoDocumento10 páginas1.5 Teorema de de Moivre, Potencias y Extracción de Raíces de Un Número ComplejoCesar Jair Cabrera BravoAinda não há avaliações
- Transformaciones LinealesDocumento15 páginasTransformaciones Linealeslola00999100% (1)
- 4.3 Curvas y Superficies de Nivel.Documento9 páginas4.3 Curvas y Superficies de Nivel.Juan Mcfly Badillo100% (3)
- 2.5. Cálculo de La Inversa de Una Matriz 2-10-2014 PDFDocumento14 páginas2.5. Cálculo de La Inversa de Una Matriz 2-10-2014 PDFEduardo GuerraAinda não há avaliações
- 2.3 Ecuaciones Paramétricas de Algunas Curvas y Su Representación Gráfica.Documento2 páginas2.3 Ecuaciones Paramétricas de Algunas Curvas y Su Representación Gráfica.Juan Mcfly Badillo73% (15)
- 2.1 Definición de Matriz, Notación y OrdenDocumento17 páginas2.1 Definición de Matriz, Notación y OrdenLogan RDAinda não há avaliações
- Aplicaciones de Las Transformaciones LinealesDocumento2 páginasAplicaciones de Las Transformaciones LinealesGusanito guason0% (1)
- 4.1 Definición de Espacio Vectorial PDFDocumento1 página4.1 Definición de Espacio Vectorial PDFmaikvai100% (2)
- Representación gráfica de problemas de programación no linealDocumento5 páginasRepresentación gráfica de problemas de programación no linealMr CrystalAinda não há avaliações
- 4.7 Derivadas Parciales de Orden Superior.Documento12 páginas4.7 Derivadas Parciales de Orden Superior.Alexis Miguel PerezAinda não há avaliações
- Unidad 3 Cálculo Vectorial Funciones Vectoriales de Una Variable Real.Documento32 páginasUnidad 3 Cálculo Vectorial Funciones Vectoriales de Una Variable Real.Jennifer Zazueta100% (1)
- 5.1 Definición de Transformación Lineal.: Alexis Lucas Rizo Rafael Hernán Catzin G3C Algebra LinealDocumento8 páginas5.1 Definición de Transformación Lineal.: Alexis Lucas Rizo Rafael Hernán Catzin G3C Algebra LinealAlexis Lucas RizoAinda não há avaliações
- Calculo Vectorial 1.6 y 1.7Documento11 páginasCalculo Vectorial 1.6 y 1.7Hoshigaki Angel100% (1)
- Transformada Inversa de LaplaceDocumento8 páginasTransformada Inversa de Laplacemiguel morales100% (1)
- Transformaciones Lineales en La IngenieriaDocumento24 páginasTransformaciones Lineales en La IngenieriaANTHONI BAUTISTA50% (12)
- Unidad 5 Integracion MultipleDocumento27 páginasUnidad 5 Integracion Multiplelyon100% (2)
- Definición Del Problema de TransporteDocumento26 páginasDefinición Del Problema de TransportembaroAinda não há avaliações
- Algebra Lineal Unidad 4 y 5Documento24 páginasAlgebra Lineal Unidad 4 y 5Jose Ernesto Castro Chavez100% (1)
- 2.4 Derivada de Una Función Dada Paramétricamente.Documento5 páginas2.4 Derivada de Una Función Dada Paramétricamente.Juan Mcfly Badillo91% (11)
- Funciones Vectoriales de Una Variable RealDocumento29 páginasFunciones Vectoriales de Una Variable RealFernando Alarcon Abad67% (3)
- Definición de Transformación LinealDocumento120 páginasDefinición de Transformación LinealEmanuel MartinezAinda não há avaliações
- Integración de Funciones VectorialesDocumento5 páginasIntegración de Funciones VectorialesJuan Mcfly Badillo73% (11)
- Nucleo e Imagen de Una Transformacion LinealDocumento10 páginasNucleo e Imagen de Una Transformacion Linealjosedlc100% (3)
- Aplicación de Los Espacios VectorialesDocumento1 páginaAplicación de Los Espacios VectorialesEdgar Diaz100% (1)
- Definicion de Matriz Notacion y OrdenDocumento6 páginasDefinicion de Matriz Notacion y OrdenSilverio Hernandez60% (5)
- Algebra Lineal Tema 5Documento16 páginasAlgebra Lineal Tema 5Juan Carlos MarreroAinda não há avaliações
- Unidad 5 Álgebra LinealDocumento15 páginasUnidad 5 Álgebra LinealAhmarAinda não há avaliações
- Transformaciones LinealesDocumento26 páginasTransformaciones LinealesWera RodriguezAinda não há avaliações
- Guía para La Elaboración Del Protocolo de InvestigaciónDocumento9 páginasGuía para La Elaboración Del Protocolo de InvestigaciónSra. SonrisasAinda não há avaliações
- Presentacion Curso en Linea Servicio SocialDocumento1 páginaPresentacion Curso en Linea Servicio Socialfrancisco javier de la cruz reyesAinda não há avaliações
- Guía para La Elaboración Del Protocolo de InvestigaciónDocumento9 páginasGuía para La Elaboración Del Protocolo de InvestigaciónSra. SonrisasAinda não há avaliações
- G-3 Suministro de Agua Entubada en La Loc. de AhuatenoDocumento20 páginasG-3 Suministro de Agua Entubada en La Loc. de Ahuatenofrancisco javier de la cruz reyesAinda não há avaliações
- Resumen - de La Cruz Reyes GalileaDocumento5 páginasResumen - de La Cruz Reyes Galileafrancisco javier de la cruz reyesAinda não há avaliações
- Como Estructurar Tu Informe Final de Residencias ProfesionalesDocumento10 páginasComo Estructurar Tu Informe Final de Residencias Profesionalesmarkus298033Ainda não há avaliações
- G-3 Suministro de Agua Entubada en La Loc. de AhuatenoDocumento20 páginasG-3 Suministro de Agua Entubada en La Loc. de Ahuatenofrancisco javier de la cruz reyesAinda não há avaliações
- CHECK LIST RESID - PROF. Plan 2015Documento1 páginaCHECK LIST RESID - PROF. Plan 2015escobarAinda não há avaliações
- Guía para La Elaboración Del Protocolo de InvestigaciónDocumento9 páginasGuía para La Elaboración Del Protocolo de InvestigaciónSra. SonrisasAinda não há avaliações
- Presentacion Curso InduccionDocumento14 páginasPresentacion Curso Induccionfrancisco javier de la cruz reyesAinda não há avaliações
- CHECK LIST RESID - PROF. Plan 2015Documento1 páginaCHECK LIST RESID - PROF. Plan 2015escobarAinda não há avaliações
- Inv. Metod Mumer U4Documento13 páginasInv. Metod Mumer U4francisco javier de la cruz reyesAinda não há avaliações
- Guía para La Elaboración Del Protocolo de InvestigaciónDocumento9 páginasGuía para La Elaboración Del Protocolo de InvestigaciónSra. SonrisasAinda não há avaliações
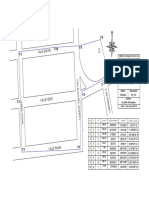
- Requisitos para FraccionamientosDocumento3 páginasRequisitos para Fraccionamientosfrancisco javier de la cruz reyesAinda não há avaliações
- Proyecto Servicio Social Cursos PDFDocumento2 páginasProyecto Servicio Social Cursos PDFfrancisco javier de la cruz reyesAinda não há avaliações
- Proyecto Servicio Social Cursos PDFDocumento2 páginasProyecto Servicio Social Cursos PDFfrancisco javier de la cruz reyesAinda não há avaliações
- 1.2. - Transporte TerrestreDocumento9 páginas1.2. - Transporte Terrestrefrancisco javier de la cruz reyesAinda não há avaliações
- Inv. Unidad 1. Medios ContinuosDocumento16 páginasInv. Unidad 1. Medios Continuosfrancisco javier de la cruz reyesAinda não há avaliações
- Horario clases Grupos 1 y 2Documento1 páginaHorario clases Grupos 1 y 2francisco javier de la cruz reyesAinda não há avaliações
- Actividad 4 Gráficos 1Documento2 páginasActividad 4 Gráficos 1francisco javier de la cruz reyesAinda não há avaliações
- Mecanica de Los Medios Continuos Unidad 1Documento26 páginasMecanica de Los Medios Continuos Unidad 1mudetraAinda não há avaliações
- 5.3. La Matriz de Una Transformación Lineal.Documento1 página5.3. La Matriz de Una Transformación Lineal.francisco javier de la cruz reyesAinda não há avaliações
- 5.3. La Matriz de Una Transformación Lineal.Documento4 páginas5.3. La Matriz de Una Transformación Lineal.francisco javier de la cruz reyesAinda não há avaliações
- Esque MasDocumento1 páginaEsque Masfrancisco javier de la cruz reyesAinda não há avaliações
- Reglamento de Transito Del Estado de VeracruzDocumento4 páginasReglamento de Transito Del Estado de Veracruzfrancisco javier de la cruz reyesAinda não há avaliações
- Reglamento de Transito Del Estado de VeracruzDocumento4 páginasReglamento de Transito Del Estado de Veracruzfrancisco javier de la cruz reyesAinda não há avaliações
- Esque MasDocumento1 páginaEsque Masfrancisco javier de la cruz reyesAinda não há avaliações
- Analisis Vectorial I 4x4Documento8 páginasAnalisis Vectorial I 4x4JulioSalazarMuguerzaAinda não há avaliações
- Notas de Clase Relatividad General PDFDocumento105 páginasNotas de Clase Relatividad General PDFFulanito de TalAinda não há avaliações
- MA264 2020 02 Sesión 3.1 Espacio y Subespacio VectorialDocumento16 páginasMA264 2020 02 Sesión 3.1 Espacio y Subespacio VectorialDIANA KAROLINE100% (1)
- Transformacion de Coordenadas Contiene Erratas Raices CuadradasDocumento5 páginasTransformacion de Coordenadas Contiene Erratas Raices CuadradasjacobAinda não há avaliações
- Introducción Al Análisis VectorialDocumento19 páginasIntroducción Al Análisis Vectorialanon_533732751Ainda não há avaliações
- Construcción de gráficas de fuerzas concurrentesDocumento7 páginasConstrucción de gráficas de fuerzas concurrentesYuleisy MuñozAinda não há avaliações
- Conceptos geométricos en espacios vectorialesDocumento16 páginasConceptos geométricos en espacios vectorialesHarold PeraltaAinda não há avaliações
- Espacios MetricosDocumento132 páginasEspacios MetricosSalomón Ching Briceño100% (1)
- Algebra Lineal I PDFDocumento21 páginasAlgebra Lineal I PDFMaicol Martinez VenturaAinda não há avaliações
- Espacios VectorialesDocumento19 páginasEspacios VectorialesLauren MarquezAinda não há avaliações
- 628 GaussDocumento17 páginas628 GaussRaquel De la CruzAinda não há avaliações
- Algebra de VectoresDocumento30 páginasAlgebra de Vectoreschristopher espinozaAinda não há avaliações
- Arreglos y MatricesDocumento45 páginasArreglos y MatricesAnonymous P2TuxR9bmAinda não há avaliações
- Algebra Lineal Resumen FriedbergDocumento18 páginasAlgebra Lineal Resumen FriedbergEmmanuel AguayoAinda não há avaliações
- Conjunto GeneradorDocumento20 páginasConjunto GeneradorPedroAinda não há avaliações
- Sesión 1.3 Vector PosiciónDocumento21 páginasSesión 1.3 Vector PosiciónKaterin Pillaca TapiaAinda não há avaliações
- Solucion General Ecuacion OndaDocumento9 páginasSolucion General Ecuacion OndaMaikel Torres GonzalezAinda não há avaliações
- Matriz JacobianaDocumento5 páginasMatriz JacobianaMichael GuimarayAinda não há avaliações
- Solucion de Problemas de Teoria ElectromagneticaDocumento282 páginasSolucion de Problemas de Teoria ElectromagneticaRafael Cueva Amaya81% (16)
- 1 Manual Curso Matlab Basico EstudioDocumento127 páginas1 Manual Curso Matlab Basico EstudioPatty PilcoAinda não há avaliações
- Semana #05 (Álgebra Lineal) ActualizadaDocumento26 páginasSemana #05 (Álgebra Lineal) ActualizadaGiraldo Moya JosueAinda não há avaliações
- Producto escalar y vectorial: problemas resueltosDocumento9 páginasProducto escalar y vectorial: problemas resueltosBraham Gonzales ZuloetaAinda não há avaliações
- Uc2 Manual de MecanicaDocumento15 páginasUc2 Manual de MecanicaAngel Escudero0% (1)
- Problemas Resueltos de Teorc3ada de ColasDocumento15 páginasProblemas Resueltos de Teorc3ada de ColasTeresa AguilarAinda não há avaliações
- Trabajo de Investigación de FísicaDocumento5 páginasTrabajo de Investigación de FísicaAlex ArceAinda não há avaliações
- U2 2023 ESTÁTICA PARTE 1Documento16 páginasU2 2023 ESTÁTICA PARTE 1NEXUS OMGAinda não há avaliações
- Vectores del Plano Real: Conceptos Básicos y Ejercicios ResueltosDocumento33 páginasVectores del Plano Real: Conceptos Básicos y Ejercicios ResueltosrykarlAinda não há avaliações
- Mecanica Cuantica UNED 2022 PDFDocumento184 páginasMecanica Cuantica UNED 2022 PDFDaniel Moreno CondeAinda não há avaliações
- Microsoft Word - Contenido Programtico de Lgebra Lineal1Documento2 páginasMicrosoft Word - Contenido Programtico de Lgebra Lineal1antonioAinda não há avaliações
- T Uce 0020 Cie 008 PDFDocumento101 páginasT Uce 0020 Cie 008 PDFJUAN SEBASTIAN BUITRAGO LONDONOAinda não há avaliações