Você também pode gostar
- 224 MMSDocumento26 páginas224 MMSharshAinda não há avaliações
- Applied Calc 2nd Edition Frank Wilson Solutions Manual Full Chapter PDFDocumento49 páginasApplied Calc 2nd Edition Frank Wilson Solutions Manual Full Chapter PDFgrainnedatw9r2100% (11)
- RR Peta Cable Schedule Vamsi 15022019Documento143 páginasRR Peta Cable Schedule Vamsi 15022019Vamsi ManojAinda não há avaliações
- Microelectronic Circuit Design 4th Edition Jaeger Solutions ManualDocumento17 páginasMicroelectronic Circuit Design 4th Edition Jaeger Solutions Manualjulieshawwzgcieqfxa100% (11)
- Dwnload Full Microelectronic Circuit Design 4th Edition Jaeger Solutions Manual PDFDocumento17 páginasDwnload Full Microelectronic Circuit Design 4th Edition Jaeger Solutions Manual PDFpardonstopping.q54x100% (11)
- Width: R6 - Top ChordDocumento6 páginasWidth: R6 - Top ChordJames382Ainda não há avaliações
- Section PropertiesDocumento6 páginasSection PropertiesJames382Ainda não há avaliações
- Width: R6 - Top ChordDocumento6 páginasWidth: R6 - Top ChordJames382Ainda não há avaliações
- R6 PDFDocumento6 páginasR6 PDFJames382Ainda não há avaliações
- Spcolumn Manual v4.201 - Page - 102Documento1 páginaSpcolumn Manual v4.201 - Page - 102anmenglaAinda não há avaliações
- Rational Method For MSMA 2nd EdDocumento38 páginasRational Method For MSMA 2nd Eddanis nyaAinda não há avaliações
- Electrical DrawingsDocumento9 páginasElectrical DrawingsAKHIL K MAinda não há avaliações
- Elektor Attiny NoiseDocumento2 páginasElektor Attiny NoiseKlemensKohlweisAinda não há avaliações
- FT1 FC6: Capacidade de Moagem 120 T/24HDocumento6 páginasFT1 FC6: Capacidade de Moagem 120 T/24HDouglas ReisAinda não há avaliações
- Math-4 2Documento5 páginasMath-4 2Akki KishoreAinda não há avaliações
- Ejercicios BinariosDocumento11 páginasEjercicios BinariosMateo NietoAinda não há avaliações
- Stereo Preamplifier Hi-Fi DIN 45500Documento1 páginaStereo Preamplifier Hi-Fi DIN 45500maricelluscanAinda não há avaliações
- CassetteDocumento4 páginasCassettevishnuAinda não há avaliações
- CW1B Review of Section PropertiesDocumento1 páginaCW1B Review of Section PropertiesCj De las AlasAinda não há avaliações
- La 7838Documento9 páginasLa 7838MUHAMMAD SISWANTOROAinda não há avaliações
- HungryRat AlphaDocumento1 páginaHungryRat Alpha吳語 Wú Yǔ Wu.Ainda não há avaliações
- Wall Roof ThimblesDocumento3 páginasWall Roof Thimblessiyavash seifAinda não há avaliações
- Frontal ViewDocumento1 páginaFrontal ViewhatotAinda não há avaliações
- Tema CorreasDocumento28 páginasTema CorreasroysagemAinda não há avaliações
- Section 03 DrivetrainDocumento140 páginasSection 03 DrivetrainPeetAinda não há avaliações
- Beam PenetrationDocumento1 páginaBeam PenetrationJMVAinda não há avaliações
- Lecture 22, 23, 24, 25, 26 - 27Documento67 páginasLecture 22, 23, 24, 25, 26 - 27Islamic Production.Ainda não há avaliações
- Steel Beam Flexural CapacityDocumento4 páginasSteel Beam Flexural Capacitym_zaman76Ainda não há avaliações
- Civ-306 Estructuras Hiperestaticas: Ejercicio #1 Proyecto I Univ.:Fajardo Mamani WilverDocumento28 páginasCiv-306 Estructuras Hiperestaticas: Ejercicio #1 Proyecto I Univ.:Fajardo Mamani WilverWifama Fajardo MamaniAinda não há avaliações
- Calculation of Draft ConstantDocumento10 páginasCalculation of Draft ConstantVinay Kumar Tripathi100% (4)
- Metrado RusticaDocumento12 páginasMetrado RusticaJOSE GEAinda não há avaliações
- Catbox: A Modular Computer InterfaceDocumento21 páginasCatbox: A Modular Computer InterfaceRenan ValenteAinda não há avaliações
- N4EA70HW 20 ReportDocumento9 páginasN4EA70HW 20 Reportmerictr61Ainda não há avaliações
- 1640247100plate Girder Bridge DesignDocumento9 páginas1640247100plate Girder Bridge DesignSanjeevini KAinda não há avaliações
- Montaggio KiwiDocumento47 páginasMontaggio KiwiFederico MontagnaAinda não há avaliações
- AngleDocumento7 páginasAngleNguyễnTúSơnAinda não há avaliações
- AngleDocumento7 páginasAngleNguyễnTúSơnAinda não há avaliações
- Projeto Super Maquina - DropboxDocumento102 páginasProjeto Super Maquina - DropboxPaulo DominguezAinda não há avaliações
- f4 External Event Board Rev BDocumento2 páginasf4 External Event Board Rev BCarlosAinda não há avaliações
- Experiment No. 4 Astable & Monostable Multivibrator Using 555 TimerDocumento7 páginasExperiment No. 4 Astable & Monostable Multivibrator Using 555 TimerchaitanyaAinda não há avaliações
- Base Plate Design ExampleDocumento74 páginasBase Plate Design ExampleNiko NištićAinda não há avaliações
- Topic FractionDocumento6 páginasTopic FractionJevi RBLXAinda não há avaliações
- For Estimating The Number of DrawingsDocumento9 páginasFor Estimating The Number of DrawingscybermineAinda não há avaliações
- Aa Manejadora Split Central Ciac 5TRDocumento1 páginaAa Manejadora Split Central Ciac 5TRPipe ValenciaAinda não há avaliações
- 2017 CompC SVC Rev E PDFDocumento2 páginas2017 CompC SVC Rev E PDFmiguelAinda não há avaliações
- Cable Tray Fill Ratio CalculationsDocumento2 páginasCable Tray Fill Ratio Calculationsjoshmalik100% (2)
- Total Length Calcs For Pipes Valves and FittingsDocumento6 páginasTotal Length Calcs For Pipes Valves and FittingsImtinan MohsinAinda não há avaliações
- Installationsmanual Fermator KorgdoorDocumento16 páginasInstallationsmanual Fermator KorgdoorSon MavAinda não há avaliações
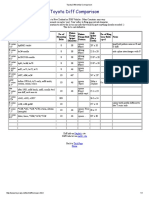
- Toyota Differential ComparisonDocumento1 páginaToyota Differential ComparisonZauf SatrapicusAinda não há avaliações
- TC74VHC541FK Datasheet en 20190131-1090421Documento10 páginasTC74VHC541FK Datasheet en 20190131-1090421Lê Anh TuấnAinda não há avaliações
- FRP VesselsDocumento4 páginasFRP VesselsKAMIL SHAIKHAinda não há avaliações
- Solution Manual For Vector Mechanics For PDFDocumento30 páginasSolution Manual For Vector Mechanics For PDFYoshi Leong0% (1)
- ادوت الحفرDocumento1 páginaادوت الحفرElatif 2007Ainda não há avaliações
- Bone BomDocumento5 páginasBone BomzokiAinda não há avaliações
- Canon Ci C Spares Catalogue BS3-6Documento8 páginasCanon Ci C Spares Catalogue BS3-6GabiAinda não há avaliações
- Avx 0.8326 Avx 1.1155Documento1 páginaAvx 0.8326 Avx 1.1155Celso ReyesAinda não há avaliações
- Mathcad Steel Project - RBS - 04042012 JB Draft3Documento8 páginasMathcad Steel Project - RBS - 04042012 JB Draft3jvixtor100% (1)
- Victaulic Firelock Low-Profile Sprinkler-Tee Style 912: 1.0 Product DescriptionDocumento3 páginasVictaulic Firelock Low-Profile Sprinkler-Tee Style 912: 1.0 Product DescriptionRemus PacurarAinda não há avaliações
- Manual Book GST 9600Documento28 páginasManual Book GST 9600Andy ZailaniAinda não há avaliações
- Venting Book1Documento2 páginasVenting Book1gsuriano7509Ainda não há avaliações
- K Factor Calculation With Stiffness MatricesDocumento18 páginasK Factor Calculation With Stiffness Matricesgsuriano7509Ainda não há avaliações
- AWI072213-Handout-Hurricane Design of Glazing SystemsDocumento42 páginasAWI072213-Handout-Hurricane Design of Glazing Systemsgsuriano7509Ainda não há avaliações
- Structural Stability W F Chen E MDocumento508 páginasStructural Stability W F Chen E MAntoine Lance93% (14)
- Wind Load Directional ProcedureDocumento1 páginaWind Load Directional Proceduregsuriano7509Ainda não há avaliações
- Wind Load Envelope ProcedureDocumento1 páginaWind Load Envelope Proceduregsuriano7509Ainda não há avaliações
- Simple and Double Reinforced Simplified EquationsDocumento15 páginasSimple and Double Reinforced Simplified Equationsgsuriano7509Ainda não há avaliações
- Simple and Double Reinforced Simplified Equations PDFDocumento2 páginasSimple and Double Reinforced Simplified Equations PDFgsuriano7509Ainda não há avaliações
- Chemistry: Edexcel GCEDocumento24 páginasChemistry: Edexcel GCEaquu174015100% (1)
- Physics Project On ThermoelectricityDocumento10 páginasPhysics Project On ThermoelectricityAbdul SamiAinda não há avaliações
- Reactive Extraction of Itaconic Acid Using Quaternary Amine Aliquat 336 in Ethyl Acetate, Toluene, Hexane, and KeroseneDocumento9 páginasReactive Extraction of Itaconic Acid Using Quaternary Amine Aliquat 336 in Ethyl Acetate, Toluene, Hexane, and Kerosenebala11ap4598Ainda não há avaliações
- Disponil Sls 101 Special - Tds - enDocumento4 páginasDisponil Sls 101 Special - Tds - enVictor LopezAinda não há avaliações
- Experimental Analysis of Laser Drilling Impacts On Rock PropertiesDocumento10 páginasExperimental Analysis of Laser Drilling Impacts On Rock PropertiesAngélica Acosta PérezAinda não há avaliações
- HJ541CP: Polypropylene Block CopolymerDocumento1 páginaHJ541CP: Polypropylene Block CopolymerEmmylouCasanovaAinda não há avaliações
- Cbse Test Paper-05: Science & Technology (Class-10) Chapter 4. Carbon and Its CompoundsDocumento1 páginaCbse Test Paper-05: Science & Technology (Class-10) Chapter 4. Carbon and Its CompoundsbannaduraiAinda não há avaliações
- Alevel Soil ChemistryDocumento78 páginasAlevel Soil ChemistryNyomenda Jamhuri WilliamAinda não há avaliações
- Hempafloor Self-Level 200Documento2 páginasHempafloor Self-Level 200Fadi MagdyAinda não há avaliações
- Prime Flex 900 XLV TdsDocumento2 páginasPrime Flex 900 XLV TdsJose Manuel CastilloAinda não há avaliações
- Fire Hazard DRRR MODULE 7Documento31 páginasFire Hazard DRRR MODULE 7Jodie Cabrera100% (3)
- AGRI Establishments in MPDocumento16 páginasAGRI Establishments in MPG P MishraAinda não há avaliações
- 196 Sample ChapterDocumento17 páginas196 Sample ChapterRoy Andrew GarciaAinda não há avaliações
- Plastic Waste ManagementDocumento20 páginasPlastic Waste Managementhappy2009yAinda não há avaliações
- Y10 Resistant Materials Theory - Material PropertiesDocumento23 páginasY10 Resistant Materials Theory - Material PropertieskevinAinda não há avaliações
- 1 Effect of Temperature Changes On CriticalDocumento9 páginas1 Effect of Temperature Changes On CriticalMuh. Thaufik UmarAinda não há avaliações
- Principles of Thermal Analysis PDFDocumento10 páginasPrinciples of Thermal Analysis PDFAlexis CarmonaAinda não há avaliações
- Shale Mechanical Properties Influence FactorsDocumento24 páginasShale Mechanical Properties Influence FactorsIntan Nur DaniaAinda não há avaliações
- Etching and Lithography in MicrofabricationDocumento8 páginasEtching and Lithography in MicrofabricationWhizzWrAinda não há avaliações
- A Us TemperingDocumento46 páginasA Us TemperingPaul RosiahAinda não há avaliações
- Stoichiometry - 1: Concept of Gram AtomDocumento36 páginasStoichiometry - 1: Concept of Gram AtomVijay KumarAinda não há avaliações
- 2009 UNIT 1 Paper 1Documento5 páginas2009 UNIT 1 Paper 1cilacax404Ainda não há avaliações
- Lab 4-V I Characteristics of PN Diode and Zener Regulator PDFDocumento9 páginasLab 4-V I Characteristics of PN Diode and Zener Regulator PDFpubg662299Ainda não há avaliações
- Jahangir Abbas CVDocumento2 páginasJahangir Abbas CVjahangirabbas6200Ainda não há avaliações
- Union GalvasteelDocumento25 páginasUnion GalvasteelJam67% (3)
- CompanypresentationDocumento25 páginasCompanypresentationkamran kainporAinda não há avaliações
- Shed BuildingDocumento59 páginasShed BuildingdomesAinda não há avaliações
- India's Legendary Wootz SteelDocumento153 páginasIndia's Legendary Wootz SteelCesare Battistotti100% (1)
- Upvc Pipe FittingDocumento38 páginasUpvc Pipe FittingRiyas UdheenAinda não há avaliações
- Buckling of Columns: Mechanics of Deformable Bodies IDocumento13 páginasBuckling of Columns: Mechanics of Deformable Bodies IJolina PagulayanAinda não há avaliações