Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Crystal StructuresDocumento54 páginasCrystal StructuresyashvantAinda não há avaliações
- Tak Company Profile - 1Documento28 páginasTak Company Profile - 1zacky100% (1)
- CPCCSF2003A Cut and Bend Materials Using Oxy LPG Equipment LR V1Documento141 páginasCPCCSF2003A Cut and Bend Materials Using Oxy LPG Equipment LR V1FfdsfdsAinda não há avaliações
- Ansi Asabe S261.7 Feb1989 (R2011)Documento5 páginasAnsi Asabe S261.7 Feb1989 (R2011)StephanAinda não há avaliações
- AcetophenoneDocumento1 páginaAcetophenoneDinda Melissa ArdiAinda não há avaliações
- Instrument Transformer Fuses Types WBP and BRT: Catalogue B12/06/01/EDocumento8 páginasInstrument Transformer Fuses Types WBP and BRT: Catalogue B12/06/01/EivanramljakAinda não há avaliações
- Anandarup Ray CVDocumento4 páginasAnandarup Ray CVsrihariAinda não há avaliações
- ABB Contactor Wear GuidelinesDocumento12 páginasABB Contactor Wear GuidelinesPhuc PhamAinda não há avaliações
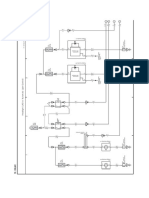
- Overall EWD Vehicle Exterior Rear Fog LightDocumento10 páginasOverall EWD Vehicle Exterior Rear Fog Lightgabrielzinho43Ainda não há avaliações
- Reference Jica-Chodai Scouring Manual in ThailandDocumento175 páginasReference Jica-Chodai Scouring Manual in ThailandSeptinurriandianiAinda não há avaliações
- Physics Lab Experiment 6Documento6 páginasPhysics Lab Experiment 6Peter Sam CoAinda não há avaliações
- Megger DET14 DET24 An en V 01Documento16 páginasMegger DET14 DET24 An en V 01costelchelariuAinda não há avaliações
- M3 Hull Plate Nesting - SP1Documento50 páginasM3 Hull Plate Nesting - SP1Bùi Công Lộc100% (1)
- Index of Revisions Rev. Description And/Or Revised SheetsDocumento17 páginasIndex of Revisions Rev. Description And/Or Revised Sheetsfabio.henriqueAinda não há avaliações
- br604 PDFDocumento5 páginasbr604 PDFmartinpellsAinda não há avaliações
- Congratulations On The Purchase of Your New Antari Z Series Fog MachineDocumento20 páginasCongratulations On The Purchase of Your New Antari Z Series Fog MachineWalter SeidlAinda não há avaliações
- IT Dashboard Dec2013Documento870 páginasIT Dashboard Dec2013Dolly SinghAinda não há avaliações
- Zeal High Precision Wet Test Gas Flow Meters 2022Documento5 páginasZeal High Precision Wet Test Gas Flow Meters 2022Hiran ChathurangaAinda não há avaliações
- BITS Herald Summer Issue 2013Documento23 páginasBITS Herald Summer Issue 2013Bits Herald100% (1)
- Fuji Xerox cp105b Service Manual PDFDocumento2 páginasFuji Xerox cp105b Service Manual PDFSyaf RoniAinda não há avaliações
- Lista Comandi Tk1m06Documento3 páginasLista Comandi Tk1m06Shahram SherkatAinda não há avaliações
- Rac MCQDocumento10 páginasRac MCQnimish lambatAinda não há avaliações
- Survey Form ADocumento8 páginasSurvey Form ASabaji MalekarAinda não há avaliações
- Certification - Speech Testing - Assistant PartnersDocumento2 páginasCertification - Speech Testing - Assistant PartnersRodrigo Freire BragaAinda não há avaliações
- Cooling Coil SizingDocumento4 páginasCooling Coil SizingRanu JanuarAinda não há avaliações
- Bee Course File (19-20) I SemDocumento31 páginasBee Course File (19-20) I SembhaveshAinda não há avaliações
- Irgb 4064 DPBFDocumento11 páginasIrgb 4064 DPBFKrista TranAinda não há avaliações
- Alternative Sources of EnergyDocumento6 páginasAlternative Sources of EnergykageAinda não há avaliações
- User Manual For Soniclean Digital Benchtop Ultrasonic Cleaners 191013 PDFDocumento12 páginasUser Manual For Soniclean Digital Benchtop Ultrasonic Cleaners 191013 PDFRafael GonzalezAinda não há avaliações
- BME Joining ProcessesDocumento11 páginasBME Joining ProcessesalysonmicheaalaAinda não há avaliações