Você também pode gostar
- Flash Software Design ConceptDocumento6 páginasFlash Software Design ConceptSaikat Das50% (2)
- FLASH Memory - WikiDocumento13 páginasFLASH Memory - WikiShyam SundarAinda não há avaliações
- Blue Ray DiskDocumento6 páginasBlue Ray DiskManpreet SachdevaAinda não há avaliações
- Self Stabilized Platform PDFDocumento4 páginasSelf Stabilized Platform PDFAnurag RanaAinda não há avaliações
- Instruction PipeliningDocumento16 páginasInstruction PipeliningMaheshAinda não há avaliações
- A New Dynamic Hash Index For Flash-Based StorageDocumento6 páginasA New Dynamic Hash Index For Flash-Based StorageMac JohnAinda não há avaliações
- Hitachi Accelerated Flash 2.0Documento26 páginasHitachi Accelerated Flash 2.0KurniaAinda não há avaliações
- NAND Flash Memory Reliability in Embedded Computer SystemsDocumento8 páginasNAND Flash Memory Reliability in Embedded Computer Systemschris_roemmichAinda não há avaliações
- App NandDocumento30 páginasApp NandRajesh MedampudiAinda não há avaliações
- MCS-012 Block 2Documento102 páginasMCS-012 Block 2Abhishek VeerkarAinda não há avaliações
- Part-A Q.1 Enlist A Few Objectives of The File Management SystemDocumento7 páginasPart-A Q.1 Enlist A Few Objectives of The File Management SystemPuneet BansalAinda não há avaliações
- Solid State Drive FAQ UsDocumento12 páginasSolid State Drive FAQ UsPatrick EwaltAinda não há avaliações
- Lovely Professional University Model Home Work: #1 Course Code: CSE102 Course Title: Exposure To Computer Disciplines School: LSEDocumento6 páginasLovely Professional University Model Home Work: #1 Course Code: CSE102 Course Title: Exposure To Computer Disciplines School: LSErishabshandilAinda não há avaliações
- FlashFire: Overcoming The Performance Bottleneck of Flash Storage TechnologyDocumento13 páginasFlashFire: Overcoming The Performance Bottleneck of Flash Storage Technologyalcuin99Ainda não há avaliações
- Hardware Platforms For Flash Memory/NVRAM Software DevelopmentDocumento14 páginasHardware Platforms For Flash Memory/NVRAM Software DevelopmentAhmed RazzaqAinda não há avaliações
- Seminar ReportDocumento28 páginasSeminar Reportapi-3755562100% (3)
- Cost-Efficient Memory Architecture Design of NAND Flash Memory Embedded SystemsDocumento5 páginasCost-Efficient Memory Architecture Design of NAND Flash Memory Embedded SystemsHarikrishnaChinthalaboyinaAinda não há avaliações
- Os Test 3 KeyDocumento12 páginasOs Test 3 Keyनेपाली नेवरि प्रसन्नAinda não há avaliações
- Case For Data Caching and Flash DisksDocumento6 páginasCase For Data Caching and Flash DiskshumairasadafsaleemAinda não há avaliações
- Drilon Lajqi FlashVMDocumento8 páginasDrilon Lajqi FlashVMDrilonLajçiAinda não há avaliações
- ICS 143 - Principles of Operating SystemsDocumento83 páginasICS 143 - Principles of Operating SystemsManoj SharmaAinda não há avaliações
- Information Storage System-Chapter3Documento17 páginasInformation Storage System-Chapter3Salha BujaziaAinda não há avaliações
- Systems Architecture 7th Edition Burd Solutions Manual 1Documento7 páginasSystems Architecture 7th Edition Burd Solutions Manual 1joseph100% (52)
- Data Storage:: The Solid State DriveDocumento10 páginasData Storage:: The Solid State DriveDiptanshu BagchiAinda não há avaliações
- Moneta: A High-Performance Storage Array Architecture For Next-Generation, Non-Volatile MemoriesDocumento11 páginasMoneta: A High-Performance Storage Array Architecture For Next-Generation, Non-Volatile MemoriesmpramsheedAinda não há avaliações
- Flash Fundamentals NotesDocumento11 páginasFlash Fundamentals NotesAnonymous GJeqPYAinda não há avaliações
- An Introduction To NAND FlashDocumento9 páginasAn Introduction To NAND FlashabhijitchAinda não há avaliações
- Computer Architecture and OSDocumento46 páginasComputer Architecture and OSDavid DarbaidzeAinda não há avaliações
- Chapter 12: Mass-Storage SystemsDocumento49 páginasChapter 12: Mass-Storage SystemsBilly Joe C. SamonteAinda não há avaliações
- The Changing Memory HierarchyDocumento3 páginasThe Changing Memory HierarchyRobert RobinsonAinda não há avaliações
- Computer ArchitectureDocumento9 páginasComputer ArchitectureRana Azeem KhanAinda não há avaliações
- CachememDocumento9 páginasCachememVu Trung Thanh (K16HL)Ainda não há avaliações
- A NOR Emulation Strategy Over NAND Flash Memory PDFDocumento8 páginasA NOR Emulation Strategy Over NAND Flash Memory PDFmuthu_mura9089Ainda não há avaliações
- PowerFlex Asynchronous ReplicationDocumento8 páginasPowerFlex Asynchronous ReplicationramshankarAinda não há avaliações
- Cache: Why Level It: Departamento de Informática, Universidade Do Minho 4710 - 057 Braga, Portugal Nunods@ipb - PTDocumento8 páginasCache: Why Level It: Departamento de Informática, Universidade Do Minho 4710 - 057 Braga, Portugal Nunods@ipb - PTsothymohan1293Ainda não há avaliações
- Using Nand Flash Memory To Improve The Performance of HDDS: Huang-Te Hsu and Ying-Wen BaiDocumento6 páginasUsing Nand Flash Memory To Improve The Performance of HDDS: Huang-Te Hsu and Ying-Wen BaiRizko PrasadaAinda não há avaliações
- Solid State Drives (SSD) and Their Challenges To Digital ForensicsDocumento5 páginasSolid State Drives (SSD) and Their Challenges To Digital ForensicsThanavit CheevaprabhanantAinda não há avaliações
- Hitachi White Paper Accelerated Flash StorageDocumento30 páginasHitachi White Paper Accelerated Flash StorageMark HinkleAinda não há avaliações
- Multi-Core Processors: Concepts and ImplementationsDocumento10 páginasMulti-Core Processors: Concepts and ImplementationsAnonymous Gl4IRRjzNAinda não há avaliações
- International Journal of Engineering Research and Development (IJERD)Documento7 páginasInternational Journal of Engineering Research and Development (IJERD)IJERDAinda não há avaliações
- Memory ManagmentDocumento24 páginasMemory ManagmentRamin Khalifa WaliAinda não há avaliações
- 1644-Article Text-3063-1-10-20210407Documento7 páginas1644-Article Text-3063-1-10-20210407Nicco FengAinda não há avaliações
- Increasing Factors Which Improves The Performance of Computer in FutureDocumento7 páginasIncreasing Factors Which Improves The Performance of Computer in FutureAwais ktkAinda não há avaliações
- Dagatan Nino PRDocumento12 páginasDagatan Nino PRdagatan.ninoAinda não há avaliações
- A Workload-Aware Adaptive Hybrid Flash Translation Layer With An Efficient Caching StrategyDocumento8 páginasA Workload-Aware Adaptive Hybrid Flash Translation Layer With An Efficient Caching StrategyHeekwan SonAinda não há avaliações
- Design of Sram in VerilogDocumento124 páginasDesign of Sram in VerilogAbhi Mohan Reddy100% (3)
- Literature Review of Cache MemoryDocumento7 páginasLiterature Review of Cache Memoryafmzhuwwumwjgf100% (1)
- Hamacher 5th ChapterDocumento45 páginasHamacher 5th Chapterapi-3760847100% (1)
- CC IndependentstudyDocumento25 páginasCC Independentstudygoku blueAinda não há avaliações
- Multi-Level Cell Flash Memory Storage Systems: Amarnath Gaini Sathish Mothe K VijayalaxmiDocumento7 páginasMulti-Level Cell Flash Memory Storage Systems: Amarnath Gaini Sathish Mothe K VijayalaxmiAmarnath GainiAinda não há avaliações
- An Efficient File-Aware Garbage Collection Algorithm For NAND Flash-Based Consumer ElectronicsDocumento5 páginasAn Efficient File-Aware Garbage Collection Algorithm For NAND Flash-Based Consumer ElectronicsTech and HacksAinda não há avaliações
- Inside Hard DisksDocumento23 páginasInside Hard DisksAnonymous OCDJg17ZAinda não há avaliações
- What Is Flash Memory and How Does It WorkDocumento13 páginasWhat Is Flash Memory and How Does It WorkAman KukarAinda não há avaliações
- Unit-2 OS Ch-1 CompleteDocumento18 páginasUnit-2 OS Ch-1 CompleteVaibhavAinda não há avaliações
- ExercisesDocumento33 páginasExercisesJeype Malbas VillarubiaAinda não há avaliações
- Fast17 BjorlingDocumento17 páginasFast17 BjorlingNameAinda não há avaliações
- Unit 08 Storage DevicesDocumento28 páginasUnit 08 Storage DevicesPrakash DangolAinda não há avaliações
- Heads: Hard Disk DriveDocumento23 páginasHeads: Hard Disk DriveSumit PalAinda não há avaliações
- Fortasa Reliability PaperDocumento12 páginasFortasa Reliability PaperSamuel NakhimovskyAinda não há avaliações
- Hard Circle Drives (HDDs): Uncovering the Center of Information StockpilingNo EverandHard Circle Drives (HDDs): Uncovering the Center of Information StockpilingAinda não há avaliações
- Lenovo X200Documento62 páginasLenovo X200sonmer enateAinda não há avaliações
- H61MXV/H67MXV Series Motherboard: Downloaded From Manuals Search EngineDocumento112 páginasH61MXV/H67MXV Series Motherboard: Downloaded From Manuals Search EnginejaramillosterAinda não há avaliações
- DH61CR ProductGuide03 EnglishDocumento78 páginasDH61CR ProductGuide03 EnglishCarlos Miguel RamirezAinda não há avaliações
- Information Technology Support Service Level II: Ethiopian TVET-SystemDocumento105 páginasInformation Technology Support Service Level II: Ethiopian TVET-Systemesubalew awukewAinda não há avaliações
- HP Pavilion tx1000-tx1320 Tablet PC Quanta TT8 Sputnic Shematic Diagram 1A PDFDocumento36 páginasHP Pavilion tx1000-tx1320 Tablet PC Quanta TT8 Sputnic Shematic Diagram 1A PDFFrancisco Jose Padrino GoyaAinda não há avaliações
- Manual Da Placa HP Dg41rqDocumento88 páginasManual Da Placa HP Dg41rqmarcos41s41Ainda não há avaliações
- The Basic Architecture of Computer SystemDocumento30 páginasThe Basic Architecture of Computer SystemAnnie GloryAinda não há avaliações
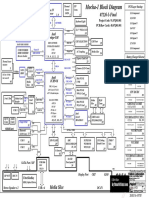
- 1a319 Compal La-7741p r0.1Documento57 páginas1a319 Compal La-7741p r0.1Syed Ahtasham ul haqAinda não há avaliações
- AMD Networking Solutions On Zen-Based Processors - For CustomersDocumento35 páginasAMD Networking Solutions On Zen-Based Processors - For CustomersFamily LinAinda não há avaliações
- Lenovo V15 G3 IAP Spec PDFDocumento8 páginasLenovo V15 G3 IAP Spec PDFYouTube YouTube vancedAinda não há avaliações
- 03 PCIe 3.0 PHY Electrical Layer Requirements FinalDocumento49 páginas03 PCIe 3.0 PHY Electrical Layer Requirements FinalSubhadeep DattaAinda não há avaliações
- DP WLAN 15041 DriversDocumento3.571 páginasDP WLAN 15041 DriversJuan Carlos Gonzalez LAinda não há avaliações
- Computer System Servicing 10 w1 2Documento43 páginasComputer System Servicing 10 w1 2Catherine IlaganAinda não há avaliações
- 939N68PV GlanDocumento52 páginas939N68PV GlanAlun CoxAinda não há avaliações
- MSI MS16811 ScematicDocumento51 páginasMSI MS16811 ScematicRosa María AmoneAinda não há avaliações
- TaiShan 2280 Server V100R001 User Guide 09 PDFDocumento213 páginasTaiShan 2280 Server V100R001 User Guide 09 PDFyasirAinda não há avaliações
- Alf51 PDFDocumento2 páginasAlf51 PDFRaffi AfnanAinda não há avaliações
- Qnap Diagramas y UsosDocumento15 páginasQnap Diagramas y UsosELVIA MAYAAinda não há avaliações
- 3.3.3.2 Lab - Upgrade HardwareDocumento2 páginas3.3.3.2 Lab - Upgrade Hardwareakb akbAinda não há avaliações
- MB Manual Ga-P55-Ud3l (Us3l) - (TPM) v2.3 e PDFDocumento112 páginasMB Manual Ga-P55-Ud3l (Us3l) - (TPM) v2.3 e PDFMilan StojanovićAinda não há avaliações
- MSI J1800i MS-7877 Rev 1.1 PDFDocumento37 páginasMSI J1800i MS-7877 Rev 1.1 PDFpedro arthur Alves100% (1)
- HP Pavilion dv6 Quanta Ut3 Ut5 Rev PV SCH PDFDocumento43 páginasHP Pavilion dv6 Quanta Ut3 Ut5 Rev PV SCH PDFAlberto Ramirez VistrainAinda não há avaliações
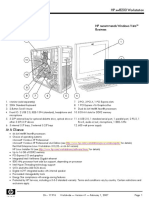
- XW 8200Documento84 páginasXW 8200ayham HamamaAinda não há avaliações
- Iot Intel Xeon d2700 Processors Kontron Solution BriefDocumento4 páginasIot Intel Xeon d2700 Processors Kontron Solution BriefAlexandre AyehAinda não há avaliações
- Msi ms-1682 r0b SchematicsDocumento52 páginasMsi ms-1682 r0b SchematicsRisoSilvaAinda não há avaliações
- PCI Express BasicsDocumento34 páginasPCI Express Basicsteo2005100% (1)
- P 5 GD 2 XDocumento96 páginasP 5 GD 2 XfilipefilipsAinda não há avaliações
- Model Name: GA-TG965MP-RH-GW: Revision 2.1Documento37 páginasModel Name: GA-TG965MP-RH-GW: Revision 2.1Richard Hernandez RuizAinda não há avaliações
- T-FORCE CARDEA Z540 M 2 PCIe5 0 SSD EDM - ENDocumento2 páginasT-FORCE CARDEA Z540 M 2 PCIe5 0 SSD EDM - ENAhmedAinda não há avaliações
- Asus h110m-r ManualDocumento26 páginasAsus h110m-r Manualdata microAinda não há avaliações