Você também pode gostar
- WordFamilySorts 1Documento38 páginasWordFamilySorts 1Karen simpsonAinda não há avaliações
- Business Plan RubricsDocumento4 páginasBusiness Plan RubricsFranz MenesisAinda não há avaliações
- Manual Etc 200 PDFDocumento1 páginaManual Etc 200 PDFFederico BroitmanAinda não há avaliações
- Crimp HandbookDocumento24 páginasCrimp Handbookrony_lesbtAinda não há avaliações
- Hyperion Essbase 6 - 5 Bootcamp - Basic TrainingDocumento659 páginasHyperion Essbase 6 - 5 Bootcamp - Basic Trainingrams08Ainda não há avaliações
- V1 001 PDFDocumento20 páginasV1 001 PDFG100% (2)
- Coating 1Documento57 páginasCoating 1Aditya PrajasAinda não há avaliações
- Arcwel Babbitt 90 SNDocumento1 páginaArcwel Babbitt 90 SNAditya PrajasAinda não há avaliações
- Process Hazard Analysis DM Plant - 25.01.18Documento51 páginasProcess Hazard Analysis DM Plant - 25.01.18Debabrata TantubaiAinda não há avaliações
- RLA Steam Turbine GeneratorDocumento5 páginasRLA Steam Turbine GeneratorAditya PrajasAinda não há avaliações
- Buy Temperature ControllersDocumento24 páginasBuy Temperature ControllersYukti AdlakhaAinda não há avaliações
- Technical Reference - Tuning A PID ControllerDocumento6 páginasTechnical Reference - Tuning A PID ControllerMelchor VasquezAinda não há avaliações
- Mechanically Operated Switches2Documento7 páginasMechanically Operated Switches2VrxDxnAinda não há avaliações
- Group1 Temperature Controller 1Documento23 páginasGroup1 Temperature Controller 1Genessa GargarAinda não há avaliações
- Temerature تقريرDocumento12 páginasTemerature تقريرAbdullah IyadAinda não há avaliações
- Temperature Controller BasicDocumento33 páginasTemperature Controller BasicGovindaraju MariyappanAinda não há avaliações
- Control of Temperature, Humidity, Pressure, Flow Rate, Level or PH Process VariablesDocumento8 páginasControl of Temperature, Humidity, Pressure, Flow Rate, Level or PH Process VariablessaravananAinda não há avaliações
- Selection of IRCON Temperature ControllersDocumento4 páginasSelection of IRCON Temperature ControllersRamces ArandaAinda não há avaliações
- On-Off Control System Characteristic: Oleh: Rizqiya W. Saputra, M.TDocumento10 páginasOn-Off Control System Characteristic: Oleh: Rizqiya W. Saputra, M.TR.W. SaputraAinda não há avaliações
- PID Made Simple: BY: Jim Elliott 8/20/97Documento8 páginasPID Made Simple: BY: Jim Elliott 8/20/97Jim ElliottAinda não há avaliações
- PID ControllerDocumento4 páginasPID Controlleralokranjan1811412Ainda não há avaliações
- Prolific's Training Program Controllers: Prolific Systems and Technologies PVT LTDDocumento24 páginasProlific's Training Program Controllers: Prolific Systems and Technologies PVT LTDSiddharth VermaAinda não há avaliações
- On/Off, Proportional, Integral, Differential Mode of ControlsDocumento15 páginasOn/Off, Proportional, Integral, Differential Mode of ControlsKrizia AnonuevoAinda não há avaliações
- EKC 315A Danfoss Rs8cS302Documento16 páginasEKC 315A Danfoss Rs8cS302davebigelow42Ainda não há avaliações
- Temp Control Che LabDocumento10 páginasTemp Control Che LabStephanie SomongcadAinda não há avaliações
- Process Controller For Temperature, Flow, Pressure Etc: ProlificDocumento23 páginasProcess Controller For Temperature, Flow, Pressure Etc: Prolifictricky777Ainda não há avaliações
- Project Report: Temperature Measurement Using Personal Computer (PC)Documento14 páginasProject Report: Temperature Measurement Using Personal Computer (PC)Poulomi MukherjeeAinda não há avaliações
- Project Report: Temperature Measurement Using Personal Computer (PC)Documento14 páginasProject Report: Temperature Measurement Using Personal Computer (PC)Poulomi MukherjeeAinda não há avaliações
- 20151210201922RC-112E User Manual220v10Documento2 páginas20151210201922RC-112E User Manual220v10Anonymous ZLmk6mPPnAinda não há avaliações
- 4.1 Proteccion Por TemperaturaDocumento6 páginas4.1 Proteccion Por TemperaturaJorge Luis Morales GonzalezAinda não há avaliações
- Biochemical Engineering B.SC, University of DebrecenDocumento6 páginasBiochemical Engineering B.SC, University of DebrecenArifuzzamanAinda não há avaliações
- Dometic SMXHT ManualDocumento2 páginasDometic SMXHT ManualAndri MorenoAinda não há avaliações
- OVEN Manual IR-DB300 Horno 4Documento11 páginasOVEN Manual IR-DB300 Horno 4unilabellivesetsAinda não há avaliações
- Controller For Controlling One Evaporator: EKC 414A1Documento20 páginasController For Controlling One Evaporator: EKC 414A1Miteak PruteanuAinda não há avaliações
- Controller For Operation of Evaporator On Water Chiller: EKC 316ADocumento16 páginasController For Operation of Evaporator On Water Chiller: EKC 316AHendra SyahputraAinda não há avaliações
- Seminar Report PPT (Zahid Mushtaq) (1) - 1Documento19 páginasSeminar Report PPT (Zahid Mushtaq) (1) - 1Fun 360Ainda não há avaliações
- Danfoss EKC201CDocumento16 páginasDanfoss EKC201CGabriel PiticasAinda não há avaliações
- Process Systems Analysis and Control D Coughanowr 3rd Ed 2Documento6 páginasProcess Systems Analysis and Control D Coughanowr 3rd Ed 2bismilishfaqAinda não há avaliações
- FinalllllllDocumento47 páginasFinalllllllSoresa JemalAinda não há avaliações
- ZL-7901A Intelligent Temperature and Humidity Controller: FeatureDocumento8 páginasZL-7901A Intelligent Temperature and Humidity Controller: FeatureBasemAinda não há avaliações
- Ahu ManualDocumento15 páginasAhu ManualAlan LaundrdayAinda não há avaliações
- ZL-7901A en V2.5 PDFDocumento7 páginasZL-7901A en V2.5 PDFgwamitiAinda não há avaliações
- Pid PDFDocumento1 páginaPid PDFashok aryaAinda não há avaliações
- ZL-7901A en V2.6b PDFDocumento8 páginasZL-7901A en V2.6b PDFElio Jose Burgos Brieva100% (1)
- Control EngineeringDocumento23 páginasControl EngineeringNor AshimyAinda não há avaliações
- ZL-7901A Intelligent Temperature and Humidity Controller: Suzhou Lily Tech Co., LTDDocumento7 páginasZL-7901A Intelligent Temperature and Humidity Controller: Suzhou Lily Tech Co., LTDHassanein Al-hadadAinda não há avaliações
- Proportional ControlDocumento47 páginasProportional ControlAbd AzizAinda não há avaliações
- dIXEL Installing and Operating Instructions Rel.2.0 - Cod. 1598002170, Manual XW60LDocumento4 páginasdIXEL Installing and Operating Instructions Rel.2.0 - Cod. 1598002170, Manual XW60LAlexey IvanovAinda não há avaliações
- Hawco Controller TheoryDocumento8 páginasHawco Controller TheoryEduardo Ocampo HernandezAinda não há avaliações
- Smart Series SSM SSMX ManualDocumento7 páginasSmart Series SSM SSMX ManualDinh Thi TruongAinda não há avaliações
- MTS-SUPER MTSC-SUPER - Operating ManualDocumento40 páginasMTS-SUPER MTSC-SUPER - Operating ManualhectorAinda não há avaliações
- Instructions: Type EMR-12Documento4 páginasInstructions: Type EMR-12jamppajoo2Ainda não há avaliações
- Temp Control of ExtruderDocumento15 páginasTemp Control of ExtruderMoksh PrasadAinda não há avaliações
- Report Ni LordDocumento2 páginasReport Ni LordKristine SecoyaAinda não há avaliações
- Control Logics 1Documento8 páginasControl Logics 1Vivaan RaviAinda não há avaliações
- Ekc 102 Rs8dy302Documento12 páginasEkc 102 Rs8dy302alphyjayemilianoAinda não há avaliações
- 2012727164328081Documento5 páginas2012727164328081adriantxeAinda não há avaliações
- Im Ec 50154 20180813Documento28 páginasIm Ec 50154 20180813Jeff BaumanAinda não há avaliações
- General: P - A - R - TCDocumento18 páginasGeneral: P - A - R - TCMohamed MosaedAinda não há avaliações
- STC-1000 Temperature Controller Operating Manual: or or orDocumento1 páginaSTC-1000 Temperature Controller Operating Manual: or or orziandAinda não há avaliações
- General Specifications: Model UT351 Digital Indicating Controller With Active Color PV DisplayDocumento12 páginasGeneral Specifications: Model UT351 Digital Indicating Controller With Active Color PV DisplayRichard NarezoAinda não há avaliações
- Auto 221 Week 15Documento1 páginaAuto 221 Week 15Angelo Christian AcostaAinda não há avaliações
- Bypass ControllerDocumento4 páginasBypass Controllernjc6151Ainda não há avaliações
- SuperTAPP SG RelayDocumento10 páginasSuperTAPP SG RelayAtiqun NabiAinda não há avaliações
- XW263LDocumento4 páginasXW263L270cdi aaAinda não há avaliações
- RDF410.21 Datasheet enDocumento14 páginasRDF410.21 Datasheet enBijan KarimkhaniAinda não há avaliações
- XW60LS GB Rel.1.0 27.10.06Documento4 páginasXW60LS GB Rel.1.0 27.10.06Jennifer Eszter SárközyAinda não há avaliações
- Temperature Controller Basics HandbookDocumento9 páginasTemperature Controller Basics HandbookSanctaTiffanyAinda não há avaliações
- Rotortype Data Rotor Turbocharger ADocumento1 páginaRotortype Data Rotor Turbocharger AAditya PrajasAinda não há avaliações
- WJ 1973 10 s433 PDFDocumento8 páginasWJ 1973 10 s433 PDFAditya PrajasAinda não há avaliações
- Spare Part Turbin PLTA Bengkok PDFDocumento1 páginaSpare Part Turbin PLTA Bengkok PDFAditya PrajasAinda não há avaliações
- MOM - NGL Progress Daily Meeting - 041119Documento3 páginasMOM - NGL Progress Daily Meeting - 041119Aditya PrajasAinda não há avaliações
- KabelDocumento3 páginasKabelAditya PrajasAinda não há avaliações
- Abrasive Blasting: COSHH Essentials in Construction: Silica Engineering and RPEDocumento4 páginasAbrasive Blasting: COSHH Essentials in Construction: Silica Engineering and RPEAditya PrajasAinda não há avaliações
- Investigation ReportDocumento9 páginasInvestigation ReportAditya PrajasAinda não há avaliações
- Class: Er410 Aws: A5.9: Request A Quotedata Sheetmaterial Safety Sheetback To Products PageDocumento2 páginasClass: Er410 Aws: A5.9: Request A Quotedata Sheetmaterial Safety Sheetback To Products PageAditya PrajasAinda não há avaliações
- Investigation ReportDocumento9 páginasInvestigation ReportAditya PrajasAinda não há avaliações
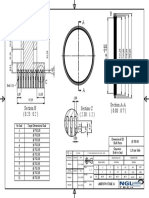
- DWG 1 Revs PDFDocumento1 páginaDWG 1 Revs PDFAditya PrajasAinda não há avaliações
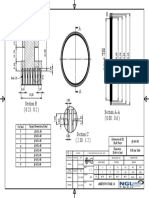
- No Seal Target Dimensional Seal 1 2 3 4 5 6 7 8 702.38 702.38Documento1 páginaNo Seal Target Dimensional Seal 1 2 3 4 5 6 7 8 702.38 702.38Aditya PrajasAinda não há avaliações
- Pt. Ngltech Services Indonesia: Final InspectionDocumento1 páginaPt. Ngltech Services Indonesia: Final InspectionAditya PrajasAinda não há avaliações
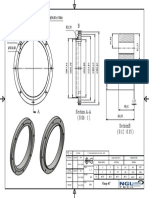
- Drawing ASSYDocumento1 páginaDrawing ASSYAditya PrajasAinda não há avaliações
- Pt. Ngltech Services Indonesia: Scope of Work Recondition TurbochargerDocumento2 páginasPt. Ngltech Services Indonesia: Scope of Work Recondition TurbochargerAditya PrajasAinda não há avaliações
- 1289,05 1123,95 1028,70 1016,00 R12,70 36,00 X 8 Hole: Flange 40"Documento1 página1289,05 1123,95 1028,70 1016,00 R12,70 36,00 X 8 Hole: Flange 40"Aditya PrajasAinda não há avaliações
- 14 PDFDocumento1 página14 PDFAditya PrajasAinda não há avaliações
- Dimensional Inspection ReportDocumento4 páginasDimensional Inspection ReportAditya PrajasAinda não há avaliações
- Java - Informatica Scenario Based Interview Questions (Convert Columns Into Rows)Documento6 páginasJava - Informatica Scenario Based Interview Questions (Convert Columns Into Rows)Sri Kanth SriAinda não há avaliações
- Nessus 6.3 Installation GuideDocumento109 páginasNessus 6.3 Installation GuideminardmiAinda não há avaliações
- Guide To Linux+ (2 Edition) ISBN 0-619-21621-2 End of Chapter Solutions Chapter 4 SolutionsDocumento8 páginasGuide To Linux+ (2 Edition) ISBN 0-619-21621-2 End of Chapter Solutions Chapter 4 SolutionsNorhasimaSulaimanAinda não há avaliações
- 300Mbps/150Mbps Wireless LAN Broadband Router: Quick Installation GuideDocumento2 páginas300Mbps/150Mbps Wireless LAN Broadband Router: Quick Installation GuideLuis AngelAinda não há avaliações
- HMA Road Design NotesDocumento86 páginasHMA Road Design NotesFarooq AhmadAinda não há avaliações
- SKANDIX - Order EditDocumento2 páginasSKANDIX - Order EditmehAinda não há avaliações
- Sony CR1220 PDFDocumento2 páginasSony CR1220 PDFdiego742000Ainda não há avaliações
- HGU User ManualDocumento72 páginasHGU User Manuallomayani100% (1)
- ES1022 y Midterm December 2013 With Final AnswersDocumento13 páginasES1022 y Midterm December 2013 With Final AnswersGASR2017Ainda não há avaliações
- Guidelines For Performance Task - LIVING MUSEUM PDFDocumento2 páginasGuidelines For Performance Task - LIVING MUSEUM PDFJoserie Barioga HernaneAinda não há avaliações
- Eurotherm 2604 PDFDocumento2 páginasEurotherm 2604 PDFLorena100% (1)
- Infineon IKFW50N65DH5Documento15 páginasInfineon IKFW50N65DH5nithinmundackal3623Ainda não há avaliações
- Characteristics of Supercritical Flow in Rectangular ChannelDocumento10 páginasCharacteristics of Supercritical Flow in Rectangular ChannelFatihAinda não há avaliações
- New Microsoft Office Power Point PresentationDocumento21 páginasNew Microsoft Office Power Point PresentationSai DhanushAinda não há avaliações
- HDR-HC1 Hc1e HC1K Hc1ek Ver.1.3 2006.07 Service Manual Suplemento 1Documento8 páginasHDR-HC1 Hc1e HC1K Hc1ek Ver.1.3 2006.07 Service Manual Suplemento 1Javier GutiérrezAinda não há avaliações
- Remote SensingDocumento30 páginasRemote SensingAdeel AhmedAinda não há avaliações
- 8) Pengolahan Data DIESEL 1 Katup Gas Konstan-DikonversiDocumento47 páginas8) Pengolahan Data DIESEL 1 Katup Gas Konstan-DikonversiIndra Arvito ArmanAinda não há avaliações
- 中国铁路客运枢纽发展回顾与展望 王昊Documento9 páginas中国铁路客运枢纽发展回顾与展望 王昊qiqiaorongAinda não há avaliações
- 1 Complete Weaving MillDocumento6 páginas1 Complete Weaving MillKomol KabirAinda não há avaliações
- Metal Additive Manufacturing For Propulsion AppliDocumento1 páginaMetal Additive Manufacturing For Propulsion Appliagilan89Ainda não há avaliações
- CMR900Documento6 páginasCMR900Time To Use BrainAinda não há avaliações
- EP T8 Diesel ForkliftsDocumento7 páginasEP T8 Diesel ForkliftsHein Sithu KyawAinda não há avaliações
- 10 MM Manifold Mount Solenoid Valve: Product SpecificationsDocumento6 páginas10 MM Manifold Mount Solenoid Valve: Product Specificationshüseyin vururAinda não há avaliações
- Bombillas LedDocumento1 páginaBombillas LedElviore PeruAinda não há avaliações