Você também pode gostar
- Optimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranDocumento6 páginasOptimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranztztztztAinda não há avaliações
- Optimal Control of CSTR: Kalpesh Pathak, Anil Markana and Nishant ParikhDocumento4 páginasOptimal Control of CSTR: Kalpesh Pathak, Anil Markana and Nishant ParikhGilbert GospelAinda não há avaliações
- Paper1ga FinalDocumento5 páginasPaper1ga FinalJismAinda não há avaliações
- Electrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandDocumento8 páginasElectrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandNabin AdhikariAinda não há avaliações
- Paper6 PDFDocumento24 páginasPaper6 PDFMary Grace VelitarioAinda não há avaliações
- A Novel Modified PID Controller Applied To Temperature Control With Self-Tuning AbilityDocumento5 páginasA Novel Modified PID Controller Applied To Temperature Control With Self-Tuning Abilitymario yanezAinda não há avaliações
- Onl9 Monitoring of TransformerDocumento4 páginasOnl9 Monitoring of TransformerMTECH IPSAinda não há avaliações
- Non-Linear Predictive Control of A DC-to-DC ConverterDocumento5 páginasNon-Linear Predictive Control of A DC-to-DC ConvertermenguemengueAinda não há avaliações
- 164 T494 PDFDocumento6 páginas164 T494 PDFSaksham PathrolAinda não há avaliações
- 10 1109@cac 2018 8623673Documento6 páginas10 1109@cac 2018 8623673reem EmaraAinda não há avaliações
- PID Controlled Synchronous Motor For Power Factor CorrectionDocumento5 páginasPID Controlled Synchronous Motor For Power Factor CorrectionigoreliasAinda não há avaliações
- Camera Ready IJE-217 PDFDocumento12 páginasCamera Ready IJE-217 PDFGlan DevadhasAinda não há avaliações
- Turbogenerator Self-Tuning Automatic Voltage RegulatorDocumento6 páginasTurbogenerator Self-Tuning Automatic Voltage Regulatoranupam789Ainda não há avaliações
- Pid Control: Thermofit: Author: Mackenzie Andrews Group Members: Kim HuaDocumento20 páginasPid Control: Thermofit: Author: Mackenzie Andrews Group Members: Kim Huaapi-272723910Ainda não há avaliações
- Intelligent Computation of Controller Using Optimisation Techniques For A Nonlinear Chemical ProcessDocumento7 páginasIntelligent Computation of Controller Using Optimisation Techniques For A Nonlinear Chemical ProcessGlan DevadhasAinda não há avaliações
- Model Reference Adaptive Control of Jacketed Stirred Tank HeaterDocumento6 páginasModel Reference Adaptive Control of Jacketed Stirred Tank HeaterChung ChuanAinda não há avaliações
- Unit-2 Temperature ControlDocumento4 páginasUnit-2 Temperature ControlSakthi PeriasamyAinda não há avaliações
- Thyristor Controlled Series Compensator-Based Controller Design Employing Genetic Algorithm: A Comparative StudyDocumento10 páginasThyristor Controlled Series Compensator-Based Controller Design Employing Genetic Algorithm: A Comparative Studysujithadharani9813Ainda não há avaliações
- CCDC 2014 - Electrode MovementDocumento6 páginasCCDC 2014 - Electrode MovementAlberto ConejoPadreAinda não há avaliações
- Design of Adaptive Pid Controller For Continuous Stirred Tank Heater (CSTH) ProcessDocumento8 páginasDesign of Adaptive Pid Controller For Continuous Stirred Tank Heater (CSTH) ProcesssanthoshramrAinda não há avaliações
- Paper 1Documento7 páginasPaper 1Oscar Ruiz SerranoAinda não há avaliações
- Robust Controller by QFTDocumento5 páginasRobust Controller by QFTkishan2016Ainda não há avaliações
- Major Project Base PaperDocumento6 páginasMajor Project Base PaperShiva GaneshAinda não há avaliações
- Temperature Control of Fluidized Bed Reactor PDFDocumento8 páginasTemperature Control of Fluidized Bed Reactor PDFJacob SchmidtAinda não há avaliações
- Direct Power Control of An AFE Using Predictive ControlDocumento8 páginasDirect Power Control of An AFE Using Predictive Controlknighthood4allAinda não há avaliações
- Digital Adaptive Control System Design For A Particular Class of Hydraulic SystemsDocumento10 páginasDigital Adaptive Control System Design For A Particular Class of Hydraulic SystemsVignesh RamakrishnanAinda não há avaliações
- ARW MIMO System PDFDocumento6 páginasARW MIMO System PDFelenchezhiyanAinda não há avaliações
- Control of A Nonlinear Continuous Stirred Tank Reactor Via Event Triggered Sliding ModesDocumento22 páginasControl of A Nonlinear Continuous Stirred Tank Reactor Via Event Triggered Sliding ModesFaizhal DimazAinda não há avaliações
- PID Controller Using Rapid Control Prototyping TechniquesDocumento11 páginasPID Controller Using Rapid Control Prototyping TechniquesAlay Camilo Lopez CastanoAinda não há avaliações
- An Adaptive Protection Algorithm For Distribution Systems With Distributed GenerationDocumento7 páginasAn Adaptive Protection Algorithm For Distribution Systems With Distributed GenerationJamile_P_NAinda não há avaliações
- Predictionand Enhancementof Power System Transient Stability Using Taylor SeriesDocumento7 páginasPredictionand Enhancementof Power System Transient Stability Using Taylor SeriesJUAN DIEGO SAUL ZU�IGA MALPARTIDAAinda não há avaliações
- Chittibabu PaprDocumento12 páginasChittibabu PaprRamesh NaiduAinda não há avaliações
- 74e48d8b7b4ed69 Ek ControleDocumento5 páginas74e48d8b7b4ed69 Ek ControleDiogo CoelhoAinda não há avaliações
- A Study On The Usage of CDA in EMTP SimulationsDocumento6 páginasA Study On The Usage of CDA in EMTP SimulationsalpcruzAinda não há avaliações
- Robust Iterative Learning Control of An Exothermic Semi-Batch Chemical ReactorDocumento19 páginasRobust Iterative Learning Control of An Exothermic Semi-Batch Chemical ReactorFCAinda não há avaliações
- Pid MracDocumento4 páginasPid MracFianilhamAinda não há avaliações
- Sruthirajp2015Documento6 páginasSruthirajp2015NikeshManandharAinda não há avaliações
- Algorithms For The Accounting of Multiple Switching Events in Digital Simulation of Power-Electronic SystemsDocumento11 páginasAlgorithms For The Accounting of Multiple Switching Events in Digital Simulation of Power-Electronic SystemsANKIT PRAJAPATIAinda não há avaliações
- Nazaruddin2008 PDFDocumento4 páginasNazaruddin2008 PDFelva RfAinda não há avaliações
- 21 ModelxDocumento9 páginas21 Modelxronaldvr022Ainda não há avaliações
- A Fuzzy Logic Based PI Autotuner - 1998 - ISA TransactionsDocumento9 páginasA Fuzzy Logic Based PI Autotuner - 1998 - ISA TransactionsLeandroSantanaAinda não há avaliações
- Hardware in The Loop Simulation of Direct Synthesis Based Two Degree of Freedom PID Control of DC-DC Boost Converter Using Real Time Digital Simulation in FPGADocumento5 páginasHardware in The Loop Simulation of Direct Synthesis Based Two Degree of Freedom PID Control of DC-DC Boost Converter Using Real Time Digital Simulation in FPGADr Tarakanath KobakuAinda não há avaliações
- Tuning of Control Loops For Grid Connected Voltage Source ConvertersDocumento6 páginasTuning of Control Loops For Grid Connected Voltage Source ConvertersThiago Moura GalvãoAinda não há avaliações
- Analysis of Temperature Control of CSTR Using S FunctionDocumento4 páginasAnalysis of Temperature Control of CSTR Using S FunctionSolecito FuentesAinda não há avaliações
- State Space Model Predictive Control of An Aerothermic Process With Actuators ConstraintsDocumento9 páginasState Space Model Predictive Control of An Aerothermic Process With Actuators ConstraintsSamantha BrownAinda não há avaliações
- Electrical Power and Energy Systems: SciencedirectDocumento12 páginasElectrical Power and Energy Systems: SciencedirectRNAinda não há avaliações
- Journal of Electrical Engineering & Technology (JEET) : ©iaemeDocumento8 páginasJournal of Electrical Engineering & Technology (JEET) : ©iaemeIAEME PublicationAinda não há avaliações
- Real-Time Nonlinear Model Predictive Control For MicrogriDocumento7 páginasReal-Time Nonlinear Model Predictive Control For MicrogriVinicius CurcioAinda não há avaliações
- Discuss The Tuning Methods For FACTS Controller CoordinationDocumento6 páginasDiscuss The Tuning Methods For FACTS Controller CoordinationYuvaraj GopalAinda não há avaliações
- Load Frequency Control of Hydro and Nuclear Power System by PI & GA ControllerDocumento6 páginasLoad Frequency Control of Hydro and Nuclear Power System by PI & GA Controllerijsret100% (1)
- Design of A Fuzzy Controller For The Active Chilled Beam SystemDocumento6 páginasDesign of A Fuzzy Controller For The Active Chilled Beam SystemhosseinAinda não há avaliações
- A Dead-Time Compensating PID Controller Structure and Robust TuningDocumento10 páginasA Dead-Time Compensating PID Controller Structure and Robust TuningAleksandar MicicAinda não há avaliações
- Cálculos Sistemas de ExcitaciónDocumento8 páginasCálculos Sistemas de ExcitaciónJussedAinda não há avaliações
- Chapter 1Documento46 páginasChapter 1Asish NandaAinda não há avaliações
- Comparative Study of Different Control Strategies For DstatcomDocumento7 páginasComparative Study of Different Control Strategies For DstatcomAmmuRaAinda não há avaliações
- Erfani 2018Documento9 páginasErfani 2018vissakoderu gpAinda não há avaliações
- Zhang2016 2Documento17 páginasZhang2016 2Nassima BekhouchaAinda não há avaliações
- A Control Scheme For Packed Bed Reactors Having A Changing Catalyst Activity Profile. I: On-Line Parameter Estimation and Feedback ControlDocumento20 páginasA Control Scheme For Packed Bed Reactors Having A Changing Catalyst Activity Profile. I: On-Line Parameter Estimation and Feedback Controlکبری ادریس رسولAinda não há avaliações
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorAinda não há avaliações
- Diagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceNo EverandDiagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceAinda não há avaliações
- My Story - MergedDocumento3 páginasMy Story - MergedGlan DevadhasAinda não há avaliações
- Iic 5Documento1 páginaIic 5Glan DevadhasAinda não há avaliações
- Iic 3Documento1 páginaIic 3Glan DevadhasAinda não há avaliações
- Marine Pollution Bulletin 158 (2020) 111352Documento4 páginasMarine Pollution Bulletin 158 (2020) 111352Glan DevadhasAinda não há avaliações
- FluidMech 2014 4Documento55 páginasFluidMech 2014 4Glan DevadhasAinda não há avaliações
- Utilization of Polymer Wastes As Transport Fuel Resources-A Recent DevelopmentDocumento5 páginasUtilization of Polymer Wastes As Transport Fuel Resources-A Recent DevelopmentGlan DevadhasAinda não há avaliações
- 5350 Mass and Momentum EquationsDocumento12 páginas5350 Mass and Momentum EquationsGlan DevadhasAinda não há avaliações
- Utilization of Polymer Wastes As Transport Fuel Resources-A Recent DevelopmentDocumento5 páginasUtilization of Polymer Wastes As Transport Fuel Resources-A Recent DevelopmentGlan DevadhasAinda não há avaliações
- s13068 019 1529 1 PDFDocumento58 páginass13068 019 1529 1 PDFGlan DevadhasAinda não há avaliações
- 0hfkdqlfdodqgzhduehkdylrxuridoxplqlxp Phwdopdwul (K/EulgfrpsrvlwhvDocumento10 páginas0hfkdqlfdodqgzhduehkdylrxuridoxplqlxp Phwdopdwul (K/EulgfrpsrvlwhvGlan DevadhasAinda não há avaliações
- 10 11648 J Ijsts 20140206 15 PDFDocumento6 páginas10 11648 J Ijsts 20140206 15 PDFGlan DevadhasAinda não há avaliações
- s13068 019 1529 1 PDFDocumento58 páginass13068 019 1529 1 PDFGlan DevadhasAinda não há avaliações
- Reg No.: - Name: - : MarksDocumento2 páginasReg No.: - Name: - : MarksGlan DevadhasAinda não há avaliações
- Engg1801 2005 Lect2Documento12 páginasEngg1801 2005 Lect2Glan DevadhasAinda não há avaliações
- Name: ................................... Reg. No.:........................Documento2 páginasName: ................................... Reg. No.:........................Glan DevadhasAinda não há avaliações
- Marine Pollution Bulletin 158 (2020) 111352Documento4 páginasMarine Pollution Bulletin 158 (2020) 111352Glan DevadhasAinda não há avaliações
- 10CE6202: Construction Personnel Management: Apj Abdul Kalam Technological UniversityDocumento2 páginas10CE6202: Construction Personnel Management: Apj Abdul Kalam Technological UniversityGlan DevadhasAinda não há avaliações
- Lecture #1 Fundamentals of Data Communications: E-626-A Data Communication and Industrial Networks (DC-IN)Documento20 páginasLecture #1 Fundamentals of Data Communications: E-626-A Data Communication and Industrial Networks (DC-IN)Glan DevadhasAinda não há avaliações
- Apj Abdul Kalam Technological University: Part A No MarksDocumento1 páginaApj Abdul Kalam Technological University: Part A No MarksGlan DevadhasAinda não há avaliações
- MATLAB For Engineering ApplicationsDocumento208 páginasMATLAB For Engineering ApplicationsGlan DevadhasAinda não há avaliações
- Matlab IntroDocumento25 páginasMatlab IntroGlan DevadhasAinda não há avaliações
- Introduction To MATLAB 7 For EngineersDocumento22 páginasIntroduction To MATLAB 7 For EngineersGlan DevadhasAinda não há avaliações
- Introduction To International Electro Technical Commission (IEC) 61131-3Documento38 páginasIntroduction To International Electro Technical Commission (IEC) 61131-3Glan DevadhasAinda não há avaliações
- EI2402-Logic and Distributed Control System QB PDFDocumento5 páginasEI2402-Logic and Distributed Control System QB PDFGlan DevadhasAinda não há avaliações
- Automatic Bottle Filling System: Presented byDocumento13 páginasAutomatic Bottle Filling System: Presented byGlan DevadhasAinda não há avaliações
- Automatic Empty Bottle Detection Using PLC Logic - Instrumentation ToolsDocumento13 páginasAutomatic Empty Bottle Detection Using PLC Logic - Instrumentation ToolsGlan DevadhasAinda não há avaliações
- International Journal of Hospitality Management: Po-Tsang Chen, Hsin-Hui HuDocumento8 páginasInternational Journal of Hospitality Management: Po-Tsang Chen, Hsin-Hui HuNihat ÇeşmeciAinda não há avaliações
- Coaching Model: SMART For Reinvention and TransitionDocumento3 páginasCoaching Model: SMART For Reinvention and TransitionInternational Coach AcademyAinda não há avaliações
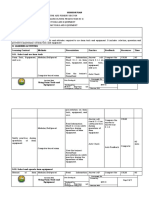
- Faculty of Engineering Technology: Lesson PlanDocumento6 páginasFaculty of Engineering Technology: Lesson PlanAdam KAinda não há avaliações
- Shine Candidates 1669027750Documento20 páginasShine Candidates 1669027750Rohan DilawarAinda não há avaliações
- Lo2. Using Farm Tools and EquipmentDocumento8 páginasLo2. Using Farm Tools and Equipmentrobelyn veranoAinda não há avaliações
- Day 19 Lesson Plan - Theme CWT Pre-Writing 1Documento5 páginasDay 19 Lesson Plan - Theme CWT Pre-Writing 1api-484708169Ainda não há avaliações
- Obembe Adebola's Personal StatementDocumento1 páginaObembe Adebola's Personal Statementeunice bimpeAinda não há avaliações
- DR Cheryl Richardsons Curricumlum Vitae-ResumeDocumento4 páginasDR Cheryl Richardsons Curricumlum Vitae-Resumeapi-119767244Ainda não há avaliações
- Teaching LoadsDocumento20 páginasTeaching LoadsZean ZeusAinda não há avaliações
- Modular/Block Teaching: Practices and Challenges at Higher Education Institutions of EthiopiaDocumento16 páginasModular/Block Teaching: Practices and Challenges at Higher Education Institutions of EthiopiaMichelle RubioAinda não há avaliações
- Q3 WEEK 1 and 2 (MARCH 1-12. 2021) Grade 2Documento10 páginasQ3 WEEK 1 and 2 (MARCH 1-12. 2021) Grade 2Michelle EsplanaAinda não há avaliações
- Clil-Unit-Sonia HurasDocumento43 páginasClil-Unit-Sonia Hurasapi-321857736100% (2)
- Curriculum and Materials CbliDocumento9 páginasCurriculum and Materials CbliNAZIRA SANTIAGO ESCAMILLAAinda não há avaliações
- Personal Development: High School Department Culminating Performance TaskDocumento3 páginasPersonal Development: High School Department Culminating Performance TaskLLYSTER VON CLYDE SUMODEBILAAinda não há avaliações
- Number TalksDocumento6 páginasNumber Talksapi-321743492Ainda não há avaliações
- Carnap, R. (1934) - On The Character of Philosophical Problems. Philosophy of Science, Vol. 1, No. 1Documento16 páginasCarnap, R. (1934) - On The Character of Philosophical Problems. Philosophy of Science, Vol. 1, No. 1Dúber CelisAinda não há avaliações
- Eurocentric RationalityDocumento22 páginasEurocentric RationalityEnayde Fernandes Silva DiasAinda não há avaliações
- A Description of A CelebrationDocumento3 páginasA Description of A CelebrationzhannaAinda não há avaliações
- Regional Ecology Center (REC) GuidelinesDocumento48 páginasRegional Ecology Center (REC) GuidelinesKarlou BorjaAinda não há avaliações
- Didactic Unit Simple Present Tense ReviewDocumento3 páginasDidactic Unit Simple Present Tense ReviewEmersdavidAinda não há avaliações
- My HanumanDocumento70 páginasMy Hanumanrajeshlodi100% (1)
- Pestle of South AfricaDocumento8 páginasPestle of South AfricaSanket Borhade100% (1)
- 12 写作样本 本月Documento6 páginas12 写作样本 本月Rainbow dongAinda não há avaliações
- Consultative Approach Communication SkillsDocumento4 páginasConsultative Approach Communication SkillsSadieDollGlonekAinda não há avaliações
- Ar Altaf Shaikh VitaeDocumento3 páginasAr Altaf Shaikh VitaearchioAinda não há avaliações
- Undergraduate Programme BrochureDocumento8 páginasUndergraduate Programme BrochureNITHISH PRANAV GAinda não há avaliações
- Information Brochure of Workshop On Nanoscale Technology Compatibility Mode 1Documento2 páginasInformation Brochure of Workshop On Nanoscale Technology Compatibility Mode 1aditi7257Ainda não há avaliações
- PIT-AR2022 InsidePages NewDocumento54 páginasPIT-AR2022 InsidePages NewMaria Francisca SarinoAinda não há avaliações
- Armstrong & Hauser 2009Documento30 páginasArmstrong & Hauser 2009Sandra Janeth Santacruz SilvaAinda não há avaliações
- End-of-Course Reflection Paper/Questionnaire: Guide Questions Response/sDocumento3 páginasEnd-of-Course Reflection Paper/Questionnaire: Guide Questions Response/sNitaflor Ganio100% (1)