Você também pode gostar
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11No EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Ainda não há avaliações
- Legrangian FormalismDocumento12 páginasLegrangian FormalismSreelakshmi AnilAinda não há avaliações
- The Theory of Relativity: And Other EssaysNo EverandThe Theory of Relativity: And Other EssaysNota: 4.5 de 5 estrelas4.5/5 (11)
- Collection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyNo EverandCollection of Problems in Classical Mechanics: International Series of Monographs in Natural PhilosophyNota: 3 de 5 estrelas3/5 (2)
- Dynamical Systems: R.S. ThorneDocumento13 páginasDynamical Systems: R.S. Thornezcapg17Ainda não há avaliações
- 2019 Minkowski SpacetimeDocumento19 páginas2019 Minkowski SpacetimeWI TOAinda não há avaliações
- Constraints 1Documento9 páginasConstraints 1praveen99944100% (2)
- Particle-Wave Duality: A Dichotomy Between Symmetry and AsymmetryDocumento9 páginasParticle-Wave Duality: A Dichotomy Between Symmetry and AsymmetryJoan VaccaroAinda não há avaliações
- Dynamics - Lecture Notes: Chris White (C.white@physics - Gla.ac - Uk)Documento44 páginasDynamics - Lecture Notes: Chris White (C.white@physics - Gla.ac - Uk)Saravana ArunAinda não há avaliações
- DinámicaDocumento24 páginasDinámicaJessicaNgSánchezAinda não há avaliações
- G. Sanchez SerraDocumento7 páginasG. Sanchez SerraGuifré Sánchez SerraAinda não há avaliações
- Noether's Theorem, Rotating Potentials, and Jacobi's Integral of MotionDocumento8 páginasNoether's Theorem, Rotating Potentials, and Jacobi's Integral of MotionEleni MitsiAinda não há avaliações
- PhononDocumento9 páginasPhononChristopher BrownAinda não há avaliações
- Covariance and Invariance in Physics, The Mathematization of PhysicsDocumento11 páginasCovariance and Invariance in Physics, The Mathematization of PhysicsGeorge Mpantes mathematics teacher100% (1)
- UG Physics Lecture NotesDocumento42 páginasUG Physics Lecture NotesPragalathan V S ee22b039Ainda não há avaliações
- Lecture Notes - Linear Elasticity TheoryDocumento43 páginasLecture Notes - Linear Elasticity Theoryzcapg17Ainda não há avaliações
- Vkumaran Roysoc97Documento9 páginasVkumaran Roysoc97ghjgjAinda não há avaliações
- Principles of Chemistry - CH 5 MechanicsDocumento32 páginasPrinciples of Chemistry - CH 5 MechanicsEoLegantoAinda não há avaliações
- D D P T: Los Alamos Electronic Archives: Physics/9909035Documento131 páginasD D P T: Los Alamos Electronic Archives: Physics/9909035tau_tauAinda não há avaliações
- MSC Maths Optional Paper VDocumento185 páginasMSC Maths Optional Paper VSaad KhanAinda não há avaliações
- MAT434 - 2024 Lecture I - Lagrangian FormulationDocumento11 páginasMAT434 - 2024 Lecture I - Lagrangian FormulationYeyelove PeterAinda não há avaliações
- A Class of Nonlinear Realizations of The Poincaré Group: 152.74.16.35 On: Wed, 01 Jul 2015 00:17:41Documento9 páginasA Class of Nonlinear Realizations of The Poincaré Group: 152.74.16.35 On: Wed, 01 Jul 2015 00:17:41Byron Smith ClarkAinda não há avaliações
- Giuseppe Saccomandi - Elastic Rods, Weierstrass' Theory and Special Travelling Waves Solutions With Compact SupportDocumento9 páginasGiuseppe Saccomandi - Elastic Rods, Weierstrass' Theory and Special Travelling Waves Solutions With Compact SupportLymesAinda não há avaliações
- Tunneling Wave Function of The Universe: Alexander Vilenkin and Masaki YamadaDocumento18 páginasTunneling Wave Function of The Universe: Alexander Vilenkin and Masaki YamadahshavababajajshAinda não há avaliações
- Book 2Documento33 páginasBook 2BlendedAinda não há avaliações
- Classical Relativistic Spinning Particles PDFDocumento13 páginasClassical Relativistic Spinning Particles PDFLeon FosiltAinda não há avaliações
- On an Inversion of Ideas as to the Structure of the UniverseNo EverandOn an Inversion of Ideas as to the Structure of the UniverseNota: 5 de 5 estrelas5/5 (1)
- Chapter 2. Lagrangian Formalism: Essential Graduate Physics CM: Classical MechanicsDocumento14 páginasChapter 2. Lagrangian Formalism: Essential Graduate Physics CM: Classical MechanicsplfratarAinda não há avaliações
- Zeh-2002-Decoherence - Basic Concepts and Their Interpretation.9506020v3Documento42 páginasZeh-2002-Decoherence - Basic Concepts and Their Interpretation.9506020v3sscript14100% (2)
- The foundation of the generalized theory of relativityNo EverandThe foundation of the generalized theory of relativityNota: 5 de 5 estrelas5/5 (1)
- A. Carlini Et Al - Time Machines: The Principle of Self-Consistency As A Consequence of The Principle of Minimal ActionDocumento25 páginasA. Carlini Et Al - Time Machines: The Principle of Self-Consistency As A Consequence of The Principle of Minimal ActionRtpomAinda não há avaliações
- Physics of Three-Dimensional Bosonic Topological Insulators: Surface-Deconfined Criticality and Quantized Magnetoelectric EffectDocumento28 páginasPhysics of Three-Dimensional Bosonic Topological Insulators: Surface-Deconfined Criticality and Quantized Magnetoelectric Effectcampal123Ainda não há avaliações
- Marble Wood - A Gentle Unification of Quantum Theory and General Relativity (Cristi Stoica)Documento10 páginasMarble Wood - A Gentle Unification of Quantum Theory and General Relativity (Cristi Stoica)Cristi StoicaAinda não há avaliações
- Quantum State of The UniverseDocumento20 páginasQuantum State of The UniverseJJAinda não há avaliações
- Conical Singularities and TorsionDocumento11 páginasConical Singularities and TorsionNicolas FernandezAinda não há avaliações
- Advancements in Solving Ballistic Equations Involving Quadratic DragDocumento21 páginasAdvancements in Solving Ballistic Equations Involving Quadratic DragElliott WallAinda não há avaliações
- MAT434 2022 Lecture I ConstraintsDocumento30 páginasMAT434 2022 Lecture I Constraintsleadwin princewillAinda não há avaliações
- Quantum Mechanics Thomas DeGrandDocumento381 páginasQuantum Mechanics Thomas DeGrandXu DongAinda não há avaliações
- Selected Papers on Noise and Stochastic ProcessesNo EverandSelected Papers on Noise and Stochastic ProcessesNota: 3.5 de 5 estrelas3.5/5 (2)
- Lectures On Classical Mechanics-1Documento4 páginasLectures On Classical Mechanics-1Abhijit Kar Gupta100% (6)
- Lyapunov 1408559162Documento52 páginasLyapunov 1408559162lu casAinda não há avaliações
- Quantum Rotor Theory of Spinor Condensates in Tight TrapsDocumento9 páginasQuantum Rotor Theory of Spinor Condensates in Tight TrapsgenhyinAinda não há avaliações
- Relativistic Two-Stream Instability: Nordita, Roslagstullsbacken 23, 106 91 Stockholm, SwedenDocumento15 páginasRelativistic Two-Stream Instability: Nordita, Roslagstullsbacken 23, 106 91 Stockholm, SwedenJ Jesús Villanueva GarcíaAinda não há avaliações
- Christian G. Bohmer Et Al - Dark Spinor Models in Gravitation and CosmologyDocumento43 páginasChristian G. Bohmer Et Al - Dark Spinor Models in Gravitation and CosmologyVelveetAinda não há avaliações
- Zheng-Cheng Gu and Xiao-Gang Wen - A Lattice Bosonic Model As A Quantum Theory of GravityDocumento4 páginasZheng-Cheng Gu and Xiao-Gang Wen - A Lattice Bosonic Model As A Quantum Theory of GravityKiomaxAinda não há avaliações
- APLpdf 4Documento14 páginasAPLpdf 4Abhishek IITANAinda não há avaliações
- Unit 1 Introduction To The Statistical Physics. The Microcanonical EnsembleDocumento32 páginasUnit 1 Introduction To The Statistical Physics. The Microcanonical EnsembleJesus MoralAinda não há avaliações
- T'hooft Quantum Mechanics and DeterminismDocumento13 páginasT'hooft Quantum Mechanics and Determinismaud_philAinda não há avaliações
- Kuramoto 1984Documento18 páginasKuramoto 1984Lambu CarmelAinda não há avaliações
- Lectures On General RelativityDocumento63 páginasLectures On General RelativityMichael Anthony MendozaAinda não há avaliações
- How Retrocausality Helps: Rod - Sutherland@sydney - Edu.auDocumento7 páginasHow Retrocausality Helps: Rod - Sutherland@sydney - Edu.auCamilo Andrés VargasAinda não há avaliações
- Wamit Theory ManualDocumento66 páginasWamit Theory Manualspsingh72Ainda não há avaliações
- Aspects of 3d N 2 Chern-Simons-Matter Theories-LibreDocumento77 páginasAspects of 3d N 2 Chern-Simons-Matter Theories-LibreRichard ZhuAinda não há avaliações
- Fault-Tolerant Quantum Computation by Anyons: A.Yu. KitaevDocumento29 páginasFault-Tolerant Quantum Computation by Anyons: A.Yu. KitaevNomentsuAinda não há avaliações
- Classical MechanicsDocumento16 páginasClassical MechanicsshivanandAinda não há avaliações
- Dynamics of Galaxies and Clusters of GalaxiesDocumento48 páginasDynamics of Galaxies and Clusters of GalaxiespjblkAinda não há avaliações
- Emilio Casuso Romate and John Beckman - Dark Matter and Dark Energy: Breaking The Continuum Hypothesis?Documento5 páginasEmilio Casuso Romate and John Beckman - Dark Matter and Dark Energy: Breaking The Continuum Hypothesis?AzmerzrAinda não há avaliações
- 0201 2Documento52 páginas0201 2Sveti JeronimAinda não há avaliações
- Back Corona in ESPDocumento4 páginasBack Corona in ESPewfsd67% (3)
- Dr. Sadaf Siddiq 08F UET PHD ME 47Documento206 páginasDr. Sadaf Siddiq 08F UET PHD ME 47hassanAinda não há avaliações
- FINAL LAB QUIZ 1 - Attempt ReviewDocumento4 páginasFINAL LAB QUIZ 1 - Attempt ReviewjrenceAinda não há avaliações
- Shielding Design GeneralDocumento22 páginasShielding Design GeneralAbu OmarAinda não há avaliações
- 6.5EFOZ InstallationDocumento92 páginas6.5EFOZ InstallationNick ArnouAinda não há avaliações
- Virus SopDocumento34 páginasVirus SopManikAinda não há avaliações
- Auma Sa 07.2-Sa 16.2....Documento56 páginasAuma Sa 07.2-Sa 16.2....Q Llanos HenryAinda não há avaliações
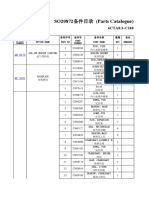
- 6CTA8.3-C240 FRO CLG862 40c0273en Parts CatalogueDocumento80 páginas6CTA8.3-C240 FRO CLG862 40c0273en Parts CataloguePurnama AbhieAinda não há avaliações
- 07 Pegasus Ibms v5.2Documento4 páginas07 Pegasus Ibms v5.2h2odavidAinda não há avaliações
- Design of High Heat Release Slinger Combustor With Rapid Acceleration RequirementDocumento18 páginasDesign of High Heat Release Slinger Combustor With Rapid Acceleration RequirementFernando TaleroAinda não há avaliações
- Characteristic of Laminar FlowDocumento1 páginaCharacteristic of Laminar FlowMohd Hafiz Ahmad100% (3)
- The Logan House: Stack Effect EffectivenessDocumento6 páginasThe Logan House: Stack Effect EffectivenessJimmy KislewAinda não há avaliações
- Gravitation Power Generation Grom GravityDocumento30 páginasGravitation Power Generation Grom GravityAlmubeen0% (1)
- Schering Bridge For Capacitance MeasurementDocumento11 páginasSchering Bridge For Capacitance MeasurementERI0% (2)
- Submitted To: Miss Iqra Mujtaba Submitted By: Nuzhat Aslam Roll No 837 Semester: 03Documento3 páginasSubmitted To: Miss Iqra Mujtaba Submitted By: Nuzhat Aslam Roll No 837 Semester: 03Nimi MalikAinda não há avaliações
- Stability Studies:: Pharmaceutical Product DevelopmentDocumento213 páginasStability Studies:: Pharmaceutical Product DevelopmentSiva Kanth100% (1)
- Fire Pump Sizing Seminar HandoutDocumento18 páginasFire Pump Sizing Seminar Handouthitokiri_knivesAinda não há avaliações
- Business Plan On Fly Ash Bricks: "An Environment Friendly Project"Documento15 páginasBusiness Plan On Fly Ash Bricks: "An Environment Friendly Project"Vignesh Kumar NagarajanAinda não há avaliações
- Rise & Impact of Crude Oil Price in IndiaDocumento10 páginasRise & Impact of Crude Oil Price in IndiaRandal SchroederAinda não há avaliações
- Tugas Ii ThermodinamicsDocumento7 páginasTugas Ii ThermodinamicsAdi Dangan MuktiAinda não há avaliações
- Photovoltaics in The Built Environment A Critical Review2Documento16 páginasPhotovoltaics in The Built Environment A Critical Review2Samahir ElzakiAinda não há avaliações
- Chapter 1 MCQ'SDocumento2 páginasChapter 1 MCQ'SNaveed MughalAinda não há avaliações
- Datasheet Techman OMIT SS 124LMDocumento2 páginasDatasheet Techman OMIT SS 124LMSteve MurphyAinda não há avaliações
- Batch 23 AdvtDocumento6 páginasBatch 23 AdvtV. Krishna ThejaAinda não há avaliações
- The Bistro Group: 9727 Kamagong St. San Antonio Village, Makati CityDocumento2 páginasThe Bistro Group: 9727 Kamagong St. San Antonio Village, Makati CityMICHAEL BALANEAinda não há avaliações
- Shah SekulicDocumento972 páginasShah SekulicBilge DemirelAinda não há avaliações
- BSI, BSII, BSIII, BSIV and BSVI Are Bharat Stage Emission Standards (BSES) That Have Been Instituted by The Government of IndiaDocumento6 páginasBSI, BSII, BSIII, BSIV and BSVI Are Bharat Stage Emission Standards (BSES) That Have Been Instituted by The Government of IndiaAnbarasu AthimoolamAinda não há avaliações
- DANIDA Call For Proposal 2023Documento46 páginasDANIDA Call For Proposal 2023Kabera GodfreyAinda não há avaliações
- UNITDocumento4 páginasUNITHarshJindalAinda não há avaliações