Você também pode gostar
- PICs Gama Media - 2017Documento83 páginasPICs Gama Media - 2017Andres Juan de dios CuadradoAinda não há avaliações
- Arquitectura de Los Microcontroladores PicDocumento21 páginasArquitectura de Los Microcontroladores PicDavid Jair Hernandez RamosAinda não há avaliações
- Microcontrolador ATMEGA328PDocumento25 páginasMicrocontrolador ATMEGA328PJuan MoralesAinda não há avaliações
- MicrocontroladoresDocumento19 páginasMicrocontroladoresJamesBIXD100% (1)
- Historia de Los Puertos de Comunicación Paralelo, Serial, USBDocumento4 páginasHistoria de Los Puertos de Comunicación Paralelo, Serial, USBangel kauil kumulAinda não há avaliações
- Microcontroladores PIC18F4550.Documento15 páginasMicrocontroladores PIC18F4550.Gabriel Acevedo lopezAinda não há avaliações
- Fpga y PLD, VHDL y VerilogDocumento6 páginasFpga y PLD, VHDL y VerilogLuis PintadoAinda não há avaliações
- Juego de Instrucciones de Los Microcontroladores PIC de 14 BitsDocumento2 páginasJuego de Instrucciones de Los Microcontroladores PIC de 14 BitsJesus Alexander Carreño PulidoAinda não há avaliações
- Tema 6 Teclado Digital DecimalDocumento4 páginasTema 6 Teclado Digital Decimal2mercedesAinda não há avaliações
- Programación II - Ejercicio Del Ratón en El LaberintoDocumento1 páginaProgramación II - Ejercicio Del Ratón en El LaberintoRaquel Umaña0% (1)
- Informe ProyectoDocumento6 páginasInforme ProyectoJorge ZambranoAinda não há avaliações
- Microcontrolador Pic16f628 e Instrucciones Gama MediaDocumento35 páginasMicrocontrolador Pic16f628 e Instrucciones Gama MediaCristian Salazar EspinozaAinda não há avaliações
- Antirrebotes ProteccionesDocumento6 páginasAntirrebotes ProteccionesDavidBravo30Ainda não há avaliações
- 01 Microcontrolador PIC16F877A PDFDocumento59 páginas01 Microcontrolador PIC16F877A PDFJorge HuamanAinda não há avaliações
- Divisor de 4 Bits en VHDLDocumento5 páginasDivisor de 4 Bits en VHDLJorge Almaguer100% (1)
- Aplicaciones de Circuitos DigitalesDocumento15 páginasAplicaciones de Circuitos DigitalesAlex Pomier AliagaAinda não há avaliações
- Unidad 4 MicrocontroladoresDocumento45 páginasUnidad 4 MicrocontroladoresOchoa JoshuaAinda não há avaliações
- EJERCICIOS ASM 3 y 4 RESUELTOS PDFDocumento5 páginasEJERCICIOS ASM 3 y 4 RESUELTOS PDFGuillermo GutierrezAinda não há avaliações
- Diferencia Arduino FPGADocumento2 páginasDiferencia Arduino FPGAManuel David Castiblanco GuillenAinda não há avaliações
- Configurar El BlueTooh HC-05Documento29 páginasConfigurar El BlueTooh HC-05Sara Lucia Rueda JaramilloAinda não há avaliações
- Hardware PC XT 8088 8086 - GUTIERREZ - PARIZACA PDFDocumento31 páginasHardware PC XT 8088 8086 - GUTIERREZ - PARIZACA PDFEGO 2014Ainda não há avaliações
- Taller I. Microprocesadores.Documento13 páginasTaller I. Microprocesadores.Daniel Antonio Urdaneta NaimAinda não há avaliações
- Tutorial Verilog BloqueDocumento42 páginasTutorial Verilog BloqueterrysconAinda não há avaliações
- Tutorial Proton Ide TUTORIAL 07Documento8 páginasTutorial Proton Ide TUTORIAL 07Ernesto Diaz Ronceros100% (1)
- Operaciones Con BitsDocumento10 páginasOperaciones Con BitspatriciomelendesAinda não há avaliações
- Programacion ICSPDocumento3 páginasProgramacion ICSPEdilberto CarvajalAinda não há avaliações
- Familia de Los Microcontroladores 1Documento4 páginasFamilia de Los Microcontroladores 1Diego Israel Granda Farfán0% (1)
- DAC0800Documento4 páginasDAC0800Victor Cardenas Cuevas50% (2)
- Cómo Hacer Un Capacímetro DigitalDocumento22 páginasCómo Hacer Un Capacímetro DigitalAntonio José Montaña Pérez de CristoAinda não há avaliações
- Arquitectura Interna y Externa Del MicrocontroladorDocumento5 páginasArquitectura Interna y Externa Del MicrocontroladorLuis ValenciaAinda não há avaliações
- Introduccion Al Bus ISA PDFDocumento14 páginasIntroduccion Al Bus ISA PDFByron PanchiAinda não há avaliações
- Contador DijitalDocumento10 páginasContador Dijitaltomkito100% (1)
- Pwm2 - Control de MotorDocumento4 páginasPwm2 - Control de Motorjavier_valdivia_42Ainda não há avaliações
- Informe ProyectoDocumento15 páginasInforme ProyectoSantiago González100% (1)
- Osciladores Mono Estable y Astables, Ejercicios ResueltosDocumento5 páginasOsciladores Mono Estable y Astables, Ejercicios ResueltosElectronica TelecomunicacionesAinda não há avaliações
- Circuito de CronometroDocumento5 páginasCircuito de CronometroTomas Ignacio ScagliottiAinda não há avaliações
- Módulo CCP - Comparador, Captura y PWMDocumento10 páginasMódulo CCP - Comparador, Captura y PWMJose Luis Rosario SalvadorAinda não há avaliações
- Tema 04 - Juego de Instrucciones Del Microprocesador 8086Documento50 páginasTema 04 - Juego de Instrucciones Del Microprocesador 8086Carlos E Hernandez100% (2)
- PIC18F2550 - Comparadores AnalógicosDocumento6 páginasPIC18F2550 - Comparadores AnalógicosLsknho KennyAinda não há avaliações
- Creacion de PCB Con ProteusDocumento31 páginasCreacion de PCB Con ProteusJose Padilla100% (1)
- Informe DadoDocumento8 páginasInforme DadoPaul Romero Riera100% (1)
- Circuitos Combinacionales (MSI)Documento34 páginasCircuitos Combinacionales (MSI)Nestor QuijadaAinda não há avaliações
- Curso Microprocesadores y Micro Control Adores Unidad 1Documento102 páginasCurso Microprocesadores y Micro Control Adores Unidad 1Dario Cruz ParraAinda não há avaliações
- Utilizando Los Comparadores Analogicos Del Pic16f877aDocumento10 páginasUtilizando Los Comparadores Analogicos Del Pic16f877aArmando CajahuaringaAinda não há avaliações
- Investigación Temario - Tema 1 MicrocontroladoresDocumento21 páginasInvestigación Temario - Tema 1 MicrocontroladoresDaniel GomezAinda não há avaliações
- Digitalizacion de SeñalesDocumento9 páginasDigitalizacion de SeñalesCamila Erazo FigueroaAinda não há avaliações
- PIC16F84A RecienteDocumento10 páginasPIC16F84A RecienteFernando Trujillo PerezAinda não há avaliações
- ADC Con Pico-BlazeDocumento13 páginasADC Con Pico-BlazeIvan RomoAinda não há avaliações
- Implementación y Control de Un Mecanismo de Dos Grados de LibertadDocumento6 páginasImplementación y Control de Un Mecanismo de Dos Grados de LibertadISmael MEdina LOpezAinda não há avaliações
- Componentes de Un MicrocontroladorDocumento5 páginasComponentes de Un MicrocontroladorBrendaAinda não há avaliações
- Robots SerialesDocumento21 páginasRobots SerialesJuan GuzmanAinda não há avaliações
- Pic 18F4550Documento11 páginasPic 18F4550seykarimAinda não há avaliações
- 7 Segementos 4 DisplaysDocumento12 páginas7 Segementos 4 DisplaysAnaly RojasAinda não há avaliações
- GalDocumento17 páginasGalMox HernandezAinda não há avaliações
- Informe Mini Sumo Digitales 1Documento4 páginasInforme Mini Sumo Digitales 1Yair Sebastian Herrera VegaAinda não há avaliações
- Circuitos SecuencialesDocumento32 páginasCircuitos SecuencialesCristobal SanchezAinda não há avaliações
- Los Microprocesadores 8086 y 8088Documento109 páginasLos Microprocesadores 8086 y 8088ICENLERAinda não há avaliações
- Estimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareNo EverandEstimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareAinda não há avaliações
- Acumulador Con Pic 16f84aDocumento11 páginasAcumulador Con Pic 16f84aNhayer NinaviaAinda não há avaliações
- Caracteristicas Del Pic 16f628aDocumento16 páginasCaracteristicas Del Pic 16f628aBaños Otrebeh33% (3)
- FICHAS PEDAGOGIAS DE 10mo A DEL PROYECTO 1 SEMANA 7Documento2 páginasFICHAS PEDAGOGIAS DE 10mo A DEL PROYECTO 1 SEMANA 7XavierMartinezAinda não há avaliações
- D-Mex Contrato EmergenteDocumento5 páginasD-Mex Contrato EmergenteXavierMartinez100% (1)
- Registro de Capacitaciones. DIMEXDocumento16 páginasRegistro de Capacitaciones. DIMEXXavierMartinezAinda não há avaliações
- Nivelacion Fol S3Documento4 páginasNivelacion Fol S3XavierMartinezAinda não há avaliações
- Actividades de Ed. Fisica de Bas Sup. y BachiDocumento1 páginaActividades de Ed. Fisica de Bas Sup. y BachiXavierMartinezAinda não há avaliações
- Actividades de Ed. Fisica de Basica Superior Del Proyecto 1 Semana 6Documento2 páginasActividades de Ed. Fisica de Basica Superior Del Proyecto 1 Semana 6XavierMartinez100% (1)
- Ficha Pedagógica - Matemática - P3 - 3ro - BguDocumento2 páginasFicha Pedagógica - Matemática - P3 - 3ro - BguXavierMartinezAinda não há avaliações
- FICHA - CONTABILIDAD GENERAL 3ERo BGUDocumento3 páginasFICHA - CONTABILIDAD GENERAL 3ERo BGUXavierMartinezAinda não há avaliações
- CONTABILIDAD GENERAL Tercero Actividad 5 SEMANA 4Documento4 páginasCONTABILIDAD GENERAL Tercero Actividad 5 SEMANA 4XavierMartinezAinda não há avaliações
- CONTABILIDAD BANCARIA TerceroDocumento3 páginasCONTABILIDAD BANCARIA TerceroXavierMartinez100% (3)
- CONTABILIDAD BANCARIA Tercero Actividad 3 SEMANA 5Documento2 páginasCONTABILIDAD BANCARIA Tercero Actividad 3 SEMANA 5XavierMartinez100% (1)
- CONTABILIDAD GENERAL Tercero Actividad 6 SEMANA 5Documento3 páginasCONTABILIDAD GENERAL Tercero Actividad 6 SEMANA 5XavierMartinezAinda não há avaliações
- CONTABILIDAD GENERAL Tercero Actividad 7 SEMANA 6Documento3 páginasCONTABILIDAD GENERAL Tercero Actividad 7 SEMANA 6XavierMartinezAinda não há avaliações
- CAMAL XAVI ExpoDocumento33 páginasCAMAL XAVI ExpoXavierMartinezAinda não há avaliações
- TRIPTICO de Alimentacion SaludableDocumento2 páginasTRIPTICO de Alimentacion SaludableXavierMartinez100% (1)
- Guia de Trabajo en Casa Del 15 Al 19 D EjunioDocumento28 páginasGuia de Trabajo en Casa Del 15 Al 19 D EjunioXavierMartinezAinda não há avaliações
- Emprendimiento EnsayoDocumento2 páginasEmprendimiento EnsayoXavierMartinezAinda não há avaliações
- Biografía MartinezDocumento1 páginaBiografía MartinezXavierMartinezAinda não há avaliações
- Defensa Al Consumidor Preguntas 15Documento6 páginasDefensa Al Consumidor Preguntas 15XavierMartinezAinda não há avaliações
- Planificacion Semanal N. - 3 Primero eDocumento1 páginaPlanificacion Semanal N. - 3 Primero eXavierMartinezAinda não há avaliações
- Cuestionario RespuesasDocumento2 páginasCuestionario RespuesasXavierMartinezAinda não há avaliações
- Cuestionario de 10 Preguntas ElectrificacionDocumento4 páginasCuestionario de 10 Preguntas ElectrificacionXavierMartinezAinda não há avaliações
- Semana1 Cap2 CCNA1 UPNDocumento44 páginasSemana1 Cap2 CCNA1 UPNShiroi Enrique DiazAinda não há avaliações
- Análisis para El Diseño de Una Red de Área LocalDocumento34 páginasAnálisis para El Diseño de Una Red de Área Localconsueloduran123Ainda não há avaliações
- Configuración We Transfer ProfesionalDocumento2 páginasConfiguración We Transfer Profesionalleonardorusi0% (1)
- Power PointDocumento58 páginasPower Pointana freitesAinda não há avaliações
- Ficha BinarioDocumento6 páginasFicha BinarioEduardo Aguado MagañaAinda não há avaliações
- Capítulo 5 - Exposicion CISCODocumento17 páginasCapítulo 5 - Exposicion CISCODARYL ARATH OSCCO BUSTAMANTEAinda não há avaliações
- Transaction Code: Deut-Heba37890672 Date: April 27, 2020 Start Time: 12:10:30 AMDocumento3 páginasTransaction Code: Deut-Heba37890672 Date: April 27, 2020 Start Time: 12:10:30 AMEsteban Enrique Posan Balcazar100% (1)
- 3.3 Comunicación 2.0 y Redes SocialesDocumento6 páginas3.3 Comunicación 2.0 y Redes SocialesMilenaAinda não há avaliações
- I 40-Ss I 40-Dr I 40-Pm Indicador I40 Manual de Uso VersionDocumento24 páginasI 40-Ss I 40-Dr I 40-Pm Indicador I40 Manual de Uso VersionJorge Sarrias PedemonteAinda não há avaliações
- ALLFusion BPWin 4Documento4 páginasALLFusion BPWin 4Daniel Gómez RAinda não há avaliações
- Manual Electrico PM4210 PutzmeisterDocumento128 páginasManual Electrico PM4210 PutzmeisterJulian Fraile100% (8)
- Profesiograma VodkaDocumento5 páginasProfesiograma VodkaAlejandra HernandezAinda não há avaliações
- SDK CONTPAQiDocumento308 páginasSDK CONTPAQiOmar EspinosaAinda não há avaliações
- CNC Okuma H-800Documento373 páginasCNC Okuma H-800ditosachAinda não há avaliações
- Los Virus Informáticos y Los AntivirusDocumento16 páginasLos Virus Informáticos y Los AntivirusLuis OrmeñoAinda não há avaliações
- Front End Malla CurricularDocumento5 páginasFront End Malla Curricularjuan supremeAinda não há avaliações
- Modelo SCPH-7502Documento5 páginasModelo SCPH-7502Gonza FregonaAinda não há avaliações
- Introducción a Control de VersionesDocumento8 páginasIntroducción a Control de VersionesdiazfodolaAinda não há avaliações
- Informe Google Earth ProDocumento9 páginasInforme Google Earth ProAlvaro H Ramirez CAinda não há avaliações
- Manual Contable PaconDocumento120 páginasManual Contable PaconRobert Yauri50% (2)
- Mapa Conceptual de Desarrollo WebDocumento3 páginasMapa Conceptual de Desarrollo WebJavier Estudio RecordAinda não há avaliações
- Ciberseguridad & CiberdefensaDocumento59 páginasCiberseguridad & CiberdefensaJairo UparellaAinda não há avaliações
- Ejemplos Ejercicios Funciones A Trozos PDFDocumento6 páginasEjemplos Ejercicios Funciones A Trozos PDFMontse RodríguezAinda não há avaliações
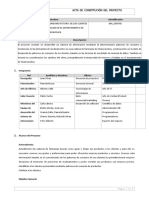
- Acta de Constitución Del Proyecto Grupo 7 - (G1) FinalDocumento5 páginasActa de Constitución Del Proyecto Grupo 7 - (G1) FinalJose Luis BelitoAinda não há avaliações
- Técnico en Sistemas Ficha No. 2182358 GaesDocumento1 páginaTécnico en Sistemas Ficha No. 2182358 GaesDIHUBER ARTURO ROA ACEVEDOAinda não há avaliações
- Acta de Constitucion - Sistema de Paquetizacion v14Documento4 páginasActa de Constitucion - Sistema de Paquetizacion v14LincolnMirandaLiuzziAinda não há avaliações
- Soft RorschachDocumento71 páginasSoft RorschachRodrigo Vargas PérezAinda não há avaliações
- Formato de Perfil de CargoDocumento2 páginasFormato de Perfil de CargoJesus67% (3)
- Informe SoftwareDocumento3 páginasInforme SoftwareGiancarlo GualdronAinda não há avaliações
- Practica#10-11 NolascoPinedoDocumento11 páginasPractica#10-11 NolascoPinedoJuan Hdz MarquezAinda não há avaliações