Você também pode gostar
- Advanced C++ Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNo EverandAdvanced C++ Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesAinda não há avaliações
- LefdefrefDocumento32 páginasLefdefrefSandesh Kumar B VAinda não há avaliações
- HP 28S MathematicalApplicationsSolutions (1988)Documento108 páginasHP 28S MathematicalApplicationsSolutions (1988)PaulKajzerAinda não há avaliações
- CH 4 Determinants Multiple Choice Questions (With Answers)Documento4 páginasCH 4 Determinants Multiple Choice Questions (With Answers)CRPF School64% (25)
- Quadratic InequalitiesDocumento3 páginasQuadratic InequalitiesTheKnow04100% (4)
- Kreatryx Digital PDFDocumento48 páginasKreatryx Digital PDFsrinuAinda não há avaliações
- Kreatryx Analog Circuits PDFDocumento43 páginasKreatryx Analog Circuits PDFbharatAinda não há avaliações
- Kreatryx Analog Circuits PDFDocumento43 páginasKreatryx Analog Circuits PDFshubhamAinda não há avaliações
- EMI Kreatryx NoteDocumento33 páginasEMI Kreatryx Note22 MAHAJAN DEVENDRA GANESHAinda não há avaliações
- Kreatryx Measurements PDFDocumento33 páginasKreatryx Measurements PDFKaushal DeshmukhAinda não há avaliações
- University of Cambridge International Examinations International General Certificate of Secondary EducationDocumento16 páginasUniversity of Cambridge International Examinations International General Certificate of Secondary Educationxelowa2256Ainda não há avaliações
- University of Cambridge International Examinations International General Certificate of Secondary EducationDocumento16 páginasUniversity of Cambridge International Examinations International General Certificate of Secondary Educationcyl97342217Ainda não há avaliações
- EC8393 Full - by WWW - EasyEngineering.net 1Documento209 páginasEC8393 Full - by WWW - EasyEngineering.net 1Nikita RanaAinda não há avaliações
- Signals and Systems Kuestion (EE) PDFDocumento50 páginasSignals and Systems Kuestion (EE) PDFlaxmandasriAinda não há avaliações
- Kreatryx Signals & SystemsDocumento30 páginasKreatryx Signals & SystemsSudip Mondal100% (1)
- Lovely School of Engineering: Term PaperDocumento11 páginasLovely School of Engineering: Term PaperThakur AbhinavAinda não há avaliações
- Course Title: Web Programing I Code: SWE 122: SYLLABUS Basic Environnent II SWE112Documento4 páginasCourse Title: Web Programing I Code: SWE 122: SYLLABUS Basic Environnent II SWE112Bahtinyuy CliffordAinda não há avaliações
- Compiler Design - Chapter 4 - Syntax Directed TranslationDocumento49 páginasCompiler Design - Chapter 4 - Syntax Directed Translationambachew tarekegnAinda não há avaliações
- A Textbook of Engineering Mathematics (Volume I)Documento379 páginasA Textbook of Engineering Mathematics (Volume I)Ngwe ThinAinda não há avaliações
- Analog NotesDocumento41 páginasAnalog NotesSoumyabrotoBanerjeeAinda não há avaliações
- Cambridge International AS & A Level: Computer Science 9618/12Documento16 páginasCambridge International AS & A Level: Computer Science 9618/12AcidAinda não há avaliações
- 0625 - s22 - QP - 4 (Extended) 1 PDFDocumento16 páginas0625 - s22 - QP - 4 (Extended) 1 PDFJoey DingAinda não há avaliações
- SM 56oderebDocumento9 páginasSM 56oderebLeonard Beredo Jr.Ainda não há avaliações
- Daa Unit 3Documento22 páginasDaa Unit 3Rahul GusainAinda não há avaliações
- 1647 6044 1 PBDocumento4 páginas1647 6044 1 PBAria Nurul HaqAinda não há avaliações
- Attention-Based Models For Text-Dependent Speaker Verification MorenoDocumento5 páginasAttention-Based Models For Text-Dependent Speaker Verification MorenoBidhan BaraiAinda não há avaliações
- Cambridge International Advanced LevelDocumento12 páginasCambridge International Advanced LevelZeeshan KhalidAinda não há avaliações
- Cambridge IGCSE: Computer Science 0478/22Documento16 páginasCambridge IGCSE: Computer Science 0478/22The Engineer GuyAinda não há avaliações
- 116cs0213 STW ReportDocumento11 páginas116cs0213 STW ReportAkshay SaraogiAinda não há avaliações
- S 23bhhhDocumento21 páginasS 23bhhhomkarbangare07Ainda não há avaliações
- 21ELEC14C - Signals and Systems - Project - ResitDocumento4 páginas21ELEC14C - Signals and Systems - Project - ResitGhulam AbbasAinda não há avaliações
- Multichannel Variable-Size Convolution For Sentence ClassificationDocumento13 páginasMultichannel Variable-Size Convolution For Sentence Classificationakg299Ainda não há avaliações
- NetwoDocumento38 páginasNetwoAmit HasanAinda não há avaliações
- A DSP Laboratory Platform For Teaching Power Electronics and Drives, 1998.Documento6 páginasA DSP Laboratory Platform For Teaching Power Electronics and Drives, 1998.Ali H. NumanAinda não há avaliações
- MA8251 Notes 1Documento828 páginasMA8251 Notes 1Azhagesvaran TamilselvamAinda não há avaliações
- Improved of Elliptic Curves Cryptography Over A Ring, ChillaliDocumento5 páginasImproved of Elliptic Curves Cryptography Over A Ring, ChillaliSOUHAIL MohamedAinda não há avaliações
- Appendix E - The Linear Regression Model in Matrix FormDocumento14 páginasAppendix E - The Linear Regression Model in Matrix FormIslani AbdessamadAinda não há avaliações
- 10EC/TE61: Answer Any FIVE Full Questions, Selecting at Least TWO Questions From Each PartDocumento2 páginas10EC/TE61: Answer Any FIVE Full Questions, Selecting at Least TWO Questions From Each PartdonyarmstrongAinda não há avaliações
- 9702 s21 QP 35 MergedDocumento68 páginas9702 s21 QP 35 MergedXAinda não há avaliações
- MATLAB Assignment: Shear ForceDocumento2 páginasMATLAB Assignment: Shear ForceAhsan NaeemAinda não há avaliações
- MATHDocumento91 páginasMATHJade SabusapAinda não há avaliações
- Mat1322-2023-Notes05-Full 1Documento3 páginasMat1322-2023-Notes05-Full 1ShuttlechairAinda não há avaliações
- Mathcad - Finite Difference MethodDocumento9 páginasMathcad - Finite Difference MethodpravinAinda não há avaliações
- Electric & Magnetic Fields (EE 204) Lab Manual: University of Hail Electrical Engineering DepartmentDocumento25 páginasElectric & Magnetic Fields (EE 204) Lab Manual: University of Hail Electrical Engineering DepartmentJayAinda não há avaliações
- Kernel MachinesDocumento33 páginasKernel MachinesShayan ChowdaryAinda não há avaliações
- Mlabi 2Documento1 páginaMlabi 2pknhieuvaoAinda não há avaliações
- Deep Neural Network - Application 2layerDocumento7 páginasDeep Neural Network - Application 2layerGijacis KhasengAinda não há avaliações
- Module 4 (Legaspi)Documento3 páginasModule 4 (Legaspi)NatsuKljenbergAinda não há avaliações
- Design and TechnologyDocumento20 páginasDesign and TechnologyRemaz BabikerAinda não há avaliações
- Fine-Tuning and Masked Lan-Guage Models: 11.1 Bidirectional Transformer EncodersDocumento17 páginasFine-Tuning and Masked Lan-Guage Models: 11.1 Bidirectional Transformer EncoderscensorsAinda não há avaliações
- Cambridge International Advanced LevelDocumento8 páginasCambridge International Advanced Level丁周辰Ainda não há avaliações
- Lec 2,3 Signal ClassificationDocumento26 páginasLec 2,3 Signal Classification7.bharani12Ainda não há avaliações
- Assembly Language Programming. Due - Description - T... PDFDocumento6 páginasAssembly Language Programming. Due - Description - T... PDFNabil AlzeqriAinda não há avaliações
- Cambridge IGCSE: Computer Science 0478/11Documento12 páginasCambridge IGCSE: Computer Science 0478/11nathanmotha1Ainda não há avaliações
- Power Systems Kuestion PDFDocumento39 páginasPower Systems Kuestion PDFaaaAinda não há avaliações
- CD-Ch04 SDTDocumento15 páginasCD-Ch04 SDTHASEN SEIDAinda não há avaliações
- Instructional Module: Republic of The Philippines Nueva Vizcaya State University Bayombong, Nueva VizcayaDocumento14 páginasInstructional Module: Republic of The Philippines Nueva Vizcaya State University Bayombong, Nueva VizcayaMary Jane BugarinAinda não há avaliações
- Kreatryx Control SystemDocumento33 páginasKreatryx Control SystemNitin MauryaAinda não há avaliações
- Lab 2 SignalsDocumento10 páginasLab 2 SignalsZia UllahAinda não há avaliações
- Time Series Segmentation For Context Recognition in Mobile DevicesDocumento8 páginasTime Series Segmentation For Context Recognition in Mobile DevicesQiming XieAinda não há avaliações
- A Text Book of Engineering Mathematics Volume-IIDocumento468 páginasA Text Book of Engineering Mathematics Volume-IIyewaleshailesh21Ainda não há avaliações
- Simulation of Short Circuit and Lightning Transients On 110 KV Overhead and Cable Transmission Lines Using ATP-EMTPDocumento14 páginasSimulation of Short Circuit and Lightning Transients On 110 KV Overhead and Cable Transmission Lines Using ATP-EMTPDejanAinda não há avaliações
- Measures of Central Tendency: MAT2001-Statistics For EngineersDocumento33 páginasMeasures of Central Tendency: MAT2001-Statistics For EngineersBharghav RoyAinda não há avaliações
- Partial and Multiple CorrelationDocumento2 páginasPartial and Multiple CorrelationBharghav RoyAinda não há avaliações
- MAT2001-Statistics For Engineers: DR - Mokesh Rayalu, M.SC, PH.D.Documento10 páginasMAT2001-Statistics For Engineers: DR - Mokesh Rayalu, M.SC, PH.D.Bharghav RoyAinda não há avaliações
- Last Formuas of First ChapterDocumento20 páginasLast Formuas of First ChapterBharghav RoyAinda não há avaliações
- MAT2001-Statistics For Engineers: Measures of VariationDocumento22 páginasMAT2001-Statistics For Engineers: Measures of VariationBharghav RoyAinda não há avaliações
- Correlation CoefficientDocumento22 páginasCorrelation CoefficientBharghav RoyAinda não há avaliações
- MAT2001-Statistics For Engineers: DR - Mokesh Rayalu, M.SC, PH.D.Documento8 páginasMAT2001-Statistics For Engineers: DR - Mokesh Rayalu, M.SC, PH.D.Bharghav RoyAinda não há avaliações
- PX X CP P: Tables of The Binomial Cumulative DistributionDocumento8 páginasPX X CP P: Tables of The Binomial Cumulative Distributionvijay9421613648Ainda não há avaliações
- Two Dimensional Random VariableDocumento27 páginasTwo Dimensional Random VariableBharghav RoyAinda não há avaliações
- Last Formuas of First ChapterDocumento20 páginasLast Formuas of First ChapterBharghav RoyAinda não há avaliações
- MAT2001-Statistics For Engineers: DR - Mokesh Rayalu, M.SC, PH.D.Documento8 páginasMAT2001-Statistics For Engineers: DR - Mokesh Rayalu, M.SC, PH.D.Bharghav RoyAinda não há avaliações
- Use of Perl in Design Flow Automation An PDFDocumento37 páginasUse of Perl in Design Flow Automation An PDFBharghav RoyAinda não há avaliações
- SyllabDocumento2 páginasSyllabSrivathson EswaranAinda não há avaliações
- WINSEM2019-20 MAT2001 ETH VL2019205002653 Reference Material I 05-Dec-2019 Measures of Central Dent.Documento26 páginasWINSEM2019-20 MAT2001 ETH VL2019205002653 Reference Material I 05-Dec-2019 Measures of Central Dent.Aditya KrishnaAinda não há avaliações
- Zomato Order: Summary and ReceiptDocumento1 páginaZomato Order: Summary and ReceiptBharghav RoyAinda não há avaliações
- CCOpt RAKDocumento55 páginasCCOpt RAKAsraa PaulAinda não há avaliações
- Microprocessor Made Easy PDFDocumento87 páginasMicroprocessor Made Easy PDFBharghav RoyAinda não há avaliações
- Zomato Order: Summary and ReceiptDocumento1 páginaZomato Order: Summary and ReceiptBharghav RoyAinda não há avaliações
- Zomato Order: Summary and ReceiptDocumento1 páginaZomato Order: Summary and ReceiptBharghav RoyAinda não há avaliações
- Zomato Order: Summary and ReceiptDocumento1 páginaZomato Order: Summary and ReceiptBharghav RoyAinda não há avaliações
- Zomato Order: Summary and ReceiptDocumento1 páginaZomato Order: Summary and ReceiptBharghav RoyAinda não há avaliações
- Zomato Order: Summary and Receipt: Item Quantity Unit Price Total PriceDocumento1 páginaZomato Order: Summary and Receipt: Item Quantity Unit Price Total PriceBharghav RoyAinda não há avaliações
- Classic 350 Gunmetal Grey: Technical SpecificationsDocumento2 páginasClassic 350 Gunmetal Grey: Technical SpecificationsYash R PatelAinda não há avaliações
- Zomato Order: Summary and ReceiptDocumento1 páginaZomato Order: Summary and ReceiptBharghav RoyAinda não há avaliações
- Zomato Order: Summary and ReceiptDocumento1 páginaZomato Order: Summary and ReceiptBharghav RoyAinda não há avaliações
- JHJDocumento75 páginasJHJBharghav RoyAinda não há avaliações
- SYALLABUSDocumento2 páginasSYALLABUSBharghav RoyAinda não há avaliações
- Quant Power Question Bank PDFDocumento565 páginasQuant Power Question Bank PDFchetan shindeAinda não há avaliações
- HTTP - PDF - Ibpsexamguru.in-Public-Images-Epapers-89809 - Number Series PDFDocumento72 páginasHTTP - PDF - Ibpsexamguru.in-Public-Images-Epapers-89809 - Number Series PDFপ্ৰকাশ বড়াAinda não há avaliações
- Control SystemDocumento11 páginasControl Systembalaji1986Ainda não há avaliações
- Solution To ODEDocumento15 páginasSolution To ODEAmar RaichurAinda não há avaliações
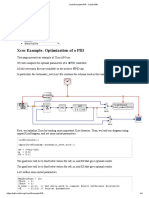
- Xcos - Examples - PID - Scilab WikiDocumento4 páginasXcos - Examples - PID - Scilab WikiAlmir ViniciusAinda não há avaliações
- Banchar Arnonkijpanich, Barbara Hammer and Alexander Hasenfuss - Local Matrix Adaptation in Topographic Neural MapsDocumento34 páginasBanchar Arnonkijpanich, Barbara Hammer and Alexander Hasenfuss - Local Matrix Adaptation in Topographic Neural MapsTuhmaAinda não há avaliações
- Convex Optimization - Introduction (S.l. Dr. Ing. Carmen Voicu)Documento32 páginasConvex Optimization - Introduction (S.l. Dr. Ing. Carmen Voicu)Diana GabrielaAinda não há avaliações
- Solution of Assignment#1 MTH101 (Fall 2020)Documento2 páginasSolution of Assignment#1 MTH101 (Fall 2020)Noori NoorAinda não há avaliações
- Micro Lecture Plan m102 GDocumento8 páginasMicro Lecture Plan m102 Gweyekim600Ainda não há avaliações
- XII Continuity and Differentiablity AssignmentDocumento1 páginaXII Continuity and Differentiablity AssignmentCRPF SchoolAinda não há avaliações
- An Introduction To Formal Language Theory That Integrates Experimentation and Proof - Allen StoughtonDocumento288 páginasAn Introduction To Formal Language Theory That Integrates Experimentation and Proof - Allen Stoughtonapi-26345612Ainda não há avaliações
- 2.first Order Higher Degree Equation - Dr. M. A. MalequeDocumento13 páginas2.first Order Higher Degree Equation - Dr. M. A. Malequetasmia hamid zim100% (1)
- 1st Half Test: School/Academy Name (Sample Test)Documento9 páginas1st Half Test: School/Academy Name (Sample Test)Usman MalikAinda não há avaliações
- MC9223-Design and Analysis of Algorithm Unit-I - IntroductionDocumento35 páginasMC9223-Design and Analysis of Algorithm Unit-I - Introductionmonicadoss85Ainda não há avaliações
- Tomek Bartoszynski and Saharon Shelah - Strongly Meager and Strong Measure Zero SetsDocumento5 páginasTomek Bartoszynski and Saharon Shelah - Strongly Meager and Strong Measure Zero SetsGlomseAinda não há avaliações
- ConditionalDocumento5 páginasConditionalkomal sitaAinda não há avaliações
- EWANDocumento21 páginasEWANHermann Dejero LozanoAinda não há avaliações
- Mat120 Assignment 2Documento13 páginasMat120 Assignment 2Different AngleAinda não há avaliações
- Define Released Structure For The Following Indeterminate StructuresDocumento8 páginasDefine Released Structure For The Following Indeterminate StructuresShaukat Ali KhanAinda não há avaliações
- LP PDFDocumento16 páginasLP PDFAnnamma JosephAinda não há avaliações
- Matind I 8-9-Differentiation ApplicationDocumento18 páginasMatind I 8-9-Differentiation ApplicationbebeAinda não há avaliações
- Square Root Functions Domain, RangeDocumento13 páginasSquare Root Functions Domain, Rangepaolo furioAinda não há avaliações
- DS-I - Introduction To Data StructureDocumento64 páginasDS-I - Introduction To Data Structurepururaj singhAinda não há avaliações
- Discrete MathematicsDocumento1 páginaDiscrete MathematicsNathan Stuart The Retarded idiotAinda não há avaliações
- 5.1 Mathematical SystemsDocumento44 páginas5.1 Mathematical SystemsDaniel Luis AguadoAinda não há avaliações
- Aliah 1st Sem. Mathematics SyllabusDocumento2 páginasAliah 1st Sem. Mathematics SyllabusAJAY KUSHWAHAAinda não há avaliações
- General Mathematics - Ip - WK1-2Documento11 páginasGeneral Mathematics - Ip - WK1-2Jennifer DamascoAinda não há avaliações
- Davis - Mathematics of Matrices PDFDocumento366 páginasDavis - Mathematics of Matrices PDFRafael Garcia100% (1)
- NeSS Assignments For Beginners Fourier SeriesDocumento3 páginasNeSS Assignments For Beginners Fourier SeriesEshan GuptaAinda não há avaliações