Você também pode gostar
- Request For ProposalDocumento216 páginasRequest For ProposalGilbert KamanziAinda não há avaliações
- POAF (Employer)Documento1 páginaPOAF (Employer)Youka MainAinda não há avaliações
- Create A Language Compiler For The Dot NETDocumento31 páginasCreate A Language Compiler For The Dot NEThboveriAinda não há avaliações
- Machine Learning LAB: Practical-1Documento24 páginasMachine Learning LAB: Practical-1Tsering Jhakree100% (1)
- Introduction to Deep Reinforcement LearningDocumento65 páginasIntroduction to Deep Reinforcement LearningAnonymous 9qlmzmlqxwAinda não há avaliações
- Artificial Intelligence-Book ChapterDocumento585 páginasArtificial Intelligence-Book Chaptersatheesh kumarAinda não há avaliações
- Loss FunctionDocumento9 páginasLoss FunctionRahat HossainAinda não há avaliações
- A Volatility Based Momentum Indicator For Traders - Steve Roehling - MediumDocumento7 páginasA Volatility Based Momentum Indicator For Traders - Steve Roehling - MediumcidsantAinda não há avaliações
- Automatic Hardware Generation For Reconfigurable ArchitectureDocumento206 páginasAutomatic Hardware Generation For Reconfigurable ArchitectureexfmlnAinda não há avaliações
- Building Mobile Applications With TensorFlowDocumento64 páginasBuilding Mobile Applications With TensorFlowcidsantAinda não há avaliações
- Ames Housing Price Prediction - Complete ML Project With PythonDocumento14 páginasAmes Housing Price Prediction - Complete ML Project With PythoncidsantAinda não há avaliações
- Deep Neural Network ASICs The Ultimate Step-By-Step GuideNo EverandDeep Neural Network ASICs The Ultimate Step-By-Step GuideAinda não há avaliações
- Print to PDF without novaPDF messageDocumento46 páginasPrint to PDF without novaPDF messageCj Santiago100% (2)
- Build A Neural Network in Python - EnlightDocumento24 páginasBuild A Neural Network in Python - EnlightPedro Elias Romero Nieto100% (1)
- Mastering Unix Shell Scripting: Bash, Bourne, and Korn Shell Scripting for Programmers, System Administrators, and UNIX GurusNo EverandMastering Unix Shell Scripting: Bash, Bourne, and Korn Shell Scripting for Programmers, System Administrators, and UNIX GurusNota: 3.5 de 5 estrelas3.5/5 (2)
- Nutanix - Hardware Admin Ref AOS v511Documento89 páginasNutanix - Hardware Admin Ref AOS v511lutung kasarungAinda não há avaliações
- Air PurgingDocumento14 páginasAir PurgingjgdberizoAinda não há avaliações
- Create LLM Application Using Langchain With EaseDocumento12 páginasCreate LLM Application Using Langchain With Easeabdullah.mansoorAinda não há avaliações
- Notes On BackpropagationDocumento14 páginasNotes On BackpropagationJun WangAinda não há avaliações
- An End-To-End Project On Time Series Analysis and Forecasting With PythonDocumento23 páginasAn End-To-End Project On Time Series Analysis and Forecasting With PythoncidsantAinda não há avaliações
- Data Mining: Practical Machine Learning Tools and Techniques (Chapter 3Documento43 páginasData Mining: Practical Machine Learning Tools and Techniques (Chapter 3Abdul SamadAinda não há avaliações
- An Example Machine Learning NotebookDocumento28 páginasAn Example Machine Learning NotebookRamakrishnan Harihara VenkatasubramaniaAinda não há avaliações
- Digital Image Processing Segmntation Lab With PythonDocumento9 páginasDigital Image Processing Segmntation Lab With PythonVishal VermaAinda não há avaliações
- Demonstrating The Openai Gym and Deep Reinforcement Learning When Applied To Atari 2600 GamesDocumento4 páginasDemonstrating The Openai Gym and Deep Reinforcement Learning When Applied To Atari 2600 GamesDavid MeyerAinda não há avaliações
- PROJECT REPORT Vidoe TrackingDocumento27 páginasPROJECT REPORT Vidoe TrackingKunal KucheriaAinda não há avaliações
- Turn Python Scripts Into Beautiful ML Tools - Towards Data ScienceDocumento24 páginasTurn Python Scripts Into Beautiful ML Tools - Towards Data Sciencecidsant100% (1)
- A Tutorial On Bayesian OptimizationDocumento22 páginasA Tutorial On Bayesian OptimizationcidsantAinda não há avaliações
- Deep Belief Nets in C++ and CUDA C: Volume 1: Restricted Boltzmann Machines and Supervised Feedforward NetworksNo EverandDeep Belief Nets in C++ and CUDA C: Volume 1: Restricted Boltzmann Machines and Supervised Feedforward NetworksAinda não há avaliações
- NN and Deep Learning: An IntroDocumento19 páginasNN and Deep Learning: An IntroNitesh YadavAinda não há avaliações
- A Step by Step Backpropagation ExampleDocumento9 páginasA Step by Step Backpropagation ExampleReno SuryaAinda não há avaliações
- Compiler Design NotesDocumento196 páginasCompiler Design Notessania2011Ainda não há avaliações
- Graph Neural Networks: A Concise IntroductionDocumento22 páginasGraph Neural Networks: A Concise IntroductionArvind RamaduraiAinda não há avaliações
- Convolutional Neural Networks For Visual RecognitionDocumento45 páginasConvolutional Neural Networks For Visual RecognitionKeren Evangeline. IAinda não há avaliações
- Artificial Neural NetworksDocumento24 páginasArtificial Neural Networkspunita singhAinda não há avaliações
- Deep Learning and Parallel Computing Environment for Bioengineering SystemsNo EverandDeep Learning and Parallel Computing Environment for Bioengineering SystemsArun Kumar SangaiahAinda não há avaliações
- Sandboxing Approach1Documento27 páginasSandboxing Approach1Muqheed Shaik67% (3)
- B C, C E: Eautiful ODE Ompelling VidenceDocumento33 páginasB C, C E: Eautiful ODE Ompelling VidenceAlexis Olivo100% (2)
- Cheat Sheet: Python For Data ScienceDocumento1 páginaCheat Sheet: Python For Data ScienceShishir Ray100% (1)
- Artificial Neural Networks: Part 1/3Documento25 páginasArtificial Neural Networks: Part 1/3Renganathan rameshAinda não há avaliações
- MATLAB Image Processing SoftwareDocumento17 páginasMATLAB Image Processing Softwareengamro85100% (1)
- Jetson Nano Developer Kit: User GuideDocumento24 páginasJetson Nano Developer Kit: User GuideDARSHAN GAinda não há avaliações
- Wiley - Python For Everyone, 3rd Edition - 978-1-119-49853-7Documento2 páginasWiley - Python For Everyone, 3rd Edition - 978-1-119-49853-7Giani BuzatuAinda não há avaliações
- Big Data New Tricks For EconometricsDocumento27 páginasBig Data New Tricks For EconometricsKal_CAinda não há avaliações
- El Gamal CipherDocumento8 páginasEl Gamal CipherJose Luis GonzalezAinda não há avaliações
- Federated LearningDocumento7 páginasFederated LearningNehaKarunyaAinda não há avaliações
- Deep Learning With Matlab Quick Start Guide PDFDocumento1 páginaDeep Learning With Matlab Quick Start Guide PDFChristopher LimachiAinda não há avaliações
- Machine LearningDocumento11 páginasMachine LearningTonpai DolnapaAinda não há avaliações
- Implementing Graph Neural Networks With TensorFlowDocumento5 páginasImplementing Graph Neural Networks With TensorFlowKevin Mendoza PomaAinda não há avaliações
- Neural NetworksDocumento459 páginasNeural NetworksemregncAinda não há avaliações
- Artificial Intelligence Anna University NotesDocumento156 páginasArtificial Intelligence Anna University NotesskyisvisibleAinda não há avaliações
- Lecture Notes - Recurrent Neural NetworksDocumento11 páginasLecture Notes - Recurrent Neural NetworksBhavin PanchalAinda não há avaliações
- Convolutional Neural Network Workbench - CodeProjectDocumento8 páginasConvolutional Neural Network Workbench - CodeProjectHector TrianaAinda não há avaliações
- Programming Assignments of Deep Learning Specialization 5 Courses 1Documento304 páginasProgramming Assignments of Deep Learning Specialization 5 Courses 1himanshu singhAinda não há avaliações
- Message Distributed SystemDocumento57 páginasMessage Distributed SystemJagan YallaAinda não há avaliações
- Design and Analysis of Algorithms Lecture NotesDocumento28 páginasDesign and Analysis of Algorithms Lecture NotesMohammad Abid ShamkaniAinda não há avaliações
- State-of-the-Art Deep Learning Models in TensorFlow: Modern Machine Learning in the Google Colab EcosystemNo EverandState-of-the-Art Deep Learning Models in TensorFlow: Modern Machine Learning in the Google Colab EcosystemAinda não há avaliações
- Formal Methods Application An Empirical Tale of Software DevelopmentDocumento13 páginasFormal Methods Application An Empirical Tale of Software DevelopmentbenjakkAinda não há avaliações
- Implementation of A New Lightweight Encryption Design For Embedded SecurityDocumento10 páginasImplementation of A New Lightweight Encryption Design For Embedded SecurityitzGeekInsideAinda não há avaliações
- OS Services for Programs & UsersDocumento6 páginasOS Services for Programs & UsersAnil KumarAinda não há avaliações
- Machine Learning in Action: Linear RegressionDocumento47 páginasMachine Learning in Action: Linear RegressionRaushan Kashyap100% (1)
- Time Series Analysis With PythonDocumento64 páginasTime Series Analysis With Pythonpandey1987Ainda não há avaliações
- Introduction To ML Partial 2 PDFDocumento54 páginasIntroduction To ML Partial 2 PDFLesocrateAinda não há avaliações
- Classification of Mushroom Fungi Using Machine LeaDocumento8 páginasClassification of Mushroom Fungi Using Machine Leadhruvi kapadiaAinda não há avaliações
- Memory Management of Linux PDFDocumento32 páginasMemory Management of Linux PDFKarthik Kabbur ManjunathAinda não há avaliações
- Advanced Binary Deobfuscation PDFDocumento136 páginasAdvanced Binary Deobfuscation PDFkougaR8Ainda não há avaliações
- Clojure For Machine Learning: Chapter No. 1 "Working With Matrices"Documento38 páginasClojure For Machine Learning: Chapter No. 1 "Working With Matrices"Packt PublishingAinda não há avaliações
- Understanding Optimizers - Deep Learning Demystified - Medium PDFDocumento21 páginasUnderstanding Optimizers - Deep Learning Demystified - Medium PDFcidsantAinda não há avaliações
- RL - Actor-Critic Methods A3C, GAE, DDPG, Q-PropDocumento29 páginasRL - Actor-Critic Methods A3C, GAE, DDPG, Q-PropcidsantAinda não há avaliações
- Loss Functions Explained - Deep Learning Demystified - MediumDocumento16 páginasLoss Functions Explained - Deep Learning Demystified - MediumcidsantAinda não há avaliações
- Alias-Free Generative Adversarial NetworksDocumento31 páginasAlias-Free Generative Adversarial NetworkscidsantAinda não há avaliações
- The 5 Classification Evaluation Metrics Every Data Scientist Must Know PDFDocumento22 páginasThe 5 Classification Evaluation Metrics Every Data Scientist Must Know PDFcidsantAinda não há avaliações
- Understanding Optimizers - Deep Learning Demystified - Medium PDFDocumento21 páginasUnderstanding Optimizers - Deep Learning Demystified - Medium PDFcidsantAinda não há avaliações
- Loss Functions Explained - Deep Learning Demystified - MediumDocumento16 páginasLoss Functions Explained - Deep Learning Demystified - MediumcidsantAinda não há avaliações
- Understanding Optimizers - Deep Learning Demystified - Medium PDFDocumento21 páginasUnderstanding Optimizers - Deep Learning Demystified - Medium PDFcidsantAinda não há avaliações
- Homework 1: Aula 1 - What's Up?Documento6 páginasHomework 1: Aula 1 - What's Up?ericwendelAinda não há avaliações
- The 5 Classification Evaluation Metrics Every Data Scientist Must Know PDFDocumento22 páginasThe 5 Classification Evaluation Metrics Every Data Scientist Must Know PDFcidsantAinda não há avaliações
- The 5 Classification Evaluation Metrics Every Data Scientist Must Know PDFDocumento22 páginasThe 5 Classification Evaluation Metrics Every Data Scientist Must Know PDFcidsantAinda não há avaliações
- Loss Functions Explained - Deep Learning Demystified - MediumDocumento16 páginasLoss Functions Explained - Deep Learning Demystified - MediumcidsantAinda não há avaliações
- Ensemble Methods - Bagging, Boosting and Stacking - Towards Data Science PDFDocumento37 páginasEnsemble Methods - Bagging, Boosting and Stacking - Towards Data Science PDFcidsantAinda não há avaliações
- How Great Data Scientists Can Stop Writing Bad CodeDocumento13 páginasHow Great Data Scientists Can Stop Writing Bad CodecidsantAinda não há avaliações
- Deploy A Machine Learning Model Using Flask - Towards Data ScienceDocumento12 páginasDeploy A Machine Learning Model Using Flask - Towards Data SciencecidsantAinda não há avaliações
- Analysis of Stock Market Cycles With Fbprophet Package in Python PDFDocumento10 páginasAnalysis of Stock Market Cycles With Fbprophet Package in Python PDFcidsant50% (2)
- A Guide To Time Series Forecasting With Prophet in Python 3 - DigitalOceanDocumento13 páginasA Guide To Time Series Forecasting With Prophet in Python 3 - DigitalOceancidsantAinda não há avaliações
- Top 3 Pandas Functions You Don't Know About (Probably)Documento11 páginasTop 3 Pandas Functions You Don't Know About (Probably)cidsantAinda não há avaliações
- Machine Learning framework for algorithmic trading energy marketsDocumento11 páginasMachine Learning framework for algorithmic trading energy marketscidsantAinda não há avaliações
- ColorImages PDFDocumento74 páginasColorImages PDFcidsantAinda não há avaliações
- A Guide To Pandas and Matplotlib For Data ExplorationDocumento23 páginasA Guide To Pandas and Matplotlib For Data ExplorationcidsantAinda não há avaliações
- 3 Strategies To Guarantee A Data Science Job With No ExperienceDocumento12 páginas3 Strategies To Guarantee A Data Science Job With No ExperiencecidsantAinda não há avaliações
- Analyze Soccer with TensorFlow and OpenCVDocumento6 páginasAnalyze Soccer with TensorFlow and OpenCVcidsantAinda não há avaliações
- Accuracy, Recall, Precision, F-Score & Specificity, Which To Optimize OnDocumento10 páginasAccuracy, Recall, Precision, F-Score & Specificity, Which To Optimize OncidsantAinda não há avaliações
- GIS Hydrology ToolsDocumento32 páginasGIS Hydrology ToolsNawanjana MaheepalaAinda não há avaliações
- I. Electronic Commerce Act of 2000 (R.A. 8792)Documento3 páginasI. Electronic Commerce Act of 2000 (R.A. 8792)Lorelie SantosAinda não há avaliações
- A39 MP Exp 4Documento7 páginasA39 MP Exp 4Devesh RajbharAinda não há avaliações
- Git CheatsheetDocumento1 páginaGit CheatsheetGautam PatnaikAinda não há avaliações
- Higher-Order Ghost StateDocumento14 páginasHigher-Order Ghost StateamandaAinda não há avaliações
- TOC-Pearson - Selling and Sales Management, 9 - E - David Jobber & Geoffrey LancasterDocumento2 páginasTOC-Pearson - Selling and Sales Management, 9 - E - David Jobber & Geoffrey LancasterDaleAinda não há avaliações
- Cardiac Science AED Manager User Guide EnglishDocumento21 páginasCardiac Science AED Manager User Guide EnglishEnerspect Medical SolutionsAinda não há avaliações
- Brought To You By: Lawrence Miller, CISSPDocumento86 páginasBrought To You By: Lawrence Miller, CISSPHermes Alejandro Rodríguez JiménezAinda não há avaliações
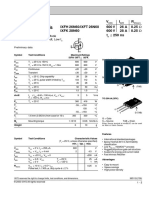
- Hiperfet Power Mosfets: V I R Ixfh 26N60/Ixft 26N60 600 V 26 A 0.25 Ixfk 28N60 600 V 28 A 0.25 T 250 NsDocumento2 páginasHiperfet Power Mosfets: V I R Ixfh 26N60/Ixft 26N60 600 V 26 A 0.25 Ixfk 28N60 600 V 28 A 0.25 T 250 NsAmirAinda não há avaliações
- Munyisia Et Al 2011bDocumento12 páginasMunyisia Et Al 2011bpita romawatiAinda não há avaliações
- Source Code Student Admission FormDocumento74 páginasSource Code Student Admission FormRahul Vasant SawantAinda não há avaliações
- Transportation ModelDocumento41 páginasTransportation ModelAbhishek0% (1)
- An Introduction of Computer Programming - g10Documento20 páginasAn Introduction of Computer Programming - g10zimran dave epelipciaAinda não há avaliações
- Omron Sysmac WayDocumento40 páginasOmron Sysmac WayAurellioAinda não há avaliações
- Paralegal or Legal Assistant or Social Worker or Caseworker or NDocumento2 páginasParalegal or Legal Assistant or Social Worker or Caseworker or Napi-78835395Ainda não há avaliações
- Tems Cell PlannerDocumento7 páginasTems Cell Plannerkerek2Ainda não há avaliações
- MXL Data SheetDocumento10 páginasMXL Data SheetMohamed MeeranAinda não há avaliações
- Unlock Business Growth with Data AnalyticsDocumento56 páginasUnlock Business Growth with Data AnalyticsAizel AlmonteAinda não há avaliações
- G 4 DocumentationDocumento33 páginasG 4 DocumentationEsku LuluAinda não há avaliações
- AWS Simple-Icons v2.0Documento10 páginasAWS Simple-Icons v2.0jonbaerAinda não há avaliações
- Creating EPortfolio As A Technology ToolDocumento56 páginasCreating EPortfolio As A Technology ToolTrisha CenitaAinda não há avaliações
- Cyber Security Challenges - Praveen NayakDocumento11 páginasCyber Security Challenges - Praveen NayakPraveen NayakAinda não há avaliações
- Amazon: Exam Questions AWS-Certified-Developer-AssociateDocumento6 páginasAmazon: Exam Questions AWS-Certified-Developer-AssociateAmit JainAinda não há avaliações
- Antivirus SoftwareDocumento1 páginaAntivirus SoftwareMary Ann SalvatierraAinda não há avaliações