Você também pode gostar
- Brazo HidraulicoDocumento3 páginasBrazo HidraulicoJavier Andres Millapan ObandoAinda não há avaliações
- Hidráulica: conceptos, componentes y aplicacionesDocumento15 páginasHidráulica: conceptos, componentes y aplicacionesRodrigo Montes de Oca100% (1)
- Gestion Electronica DieselDocumento28 páginasGestion Electronica DieselTeresa Marina PeraltaAinda não há avaliações
- Bombas IUS-UPSDocumento18 páginasBombas IUS-UPSAngel MingaAinda não há avaliações
- Bombas en serie y paraleloDocumento14 páginasBombas en serie y paraleloRicardo CotoAinda não há avaliações
- CompresorDocumento10 páginasCompresorfranshesko_888Ainda não há avaliações
- Tren MotrizDocumento4 páginasTren Motrizluis enrique martinez reyesAinda não há avaliações
- Compresor de Paletas GiratoriasDocumento12 páginasCompresor de Paletas GiratoriasstevelaloAinda não há avaliações
- Practica 2Documento10 páginasPractica 2Luigui FernandezAinda não há avaliações
- Informe de Automotriz II-semestre 2Documento14 páginasInforme de Automotriz II-semestre 2Mauricio Leiva RendonAinda não há avaliações
- Suspensión Mcpherson & Double Wishbone OkDocumento26 páginasSuspensión Mcpherson & Double Wishbone OkBenjamin FullerAinda não há avaliações
- Mantenimiento de Suspencion, Direccion y FrenosDocumento14 páginasMantenimiento de Suspencion, Direccion y FrenosRoyer yampier Alaya Atalaya100% (1)
- Nina, Tantahuahua - Cilindros Hidraulicos y NeumaticosDocumento18 páginasNina, Tantahuahua - Cilindros Hidraulicos y NeumaticosJean CarlosAinda não há avaliações
- Capacitación PC300LC-8Documento36 páginasCapacitación PC300LC-8RodolfoAinda não há avaliações
- Grupo Multiplicador y Divisor de Las Cajas de Cambios MecánicasDocumento6 páginasGrupo Multiplicador y Divisor de Las Cajas de Cambios MecánicasJairo TivantaAinda não há avaliações
- TRACTORESDocumento7 páginasTRACTORESAdalit Marquez AtanacioAinda não há avaliações
- Maquinas equipos y herramientas manualesDocumento26 páginasMaquinas equipos y herramientas manualesjesus contrerasAinda não há avaliações
- Manual de Hidraulica 2016 1Documento58 páginasManual de Hidraulica 2016 1jorgeAinda não há avaliações
- Libro Maquinariaequiposconstruccion 04capitulo2 DescripciondeequiposycalculodeproductividadDocumento130 páginasLibro Maquinariaequiposconstruccion 04capitulo2 DescripciondeequiposycalculodeproductividadRafael Castillo ValdiviesoAinda não há avaliações
- Alimentación de Combustible en Motores DiéselDocumento23 páginasAlimentación de Combustible en Motores DiéselJuan Barba GómezAinda não há avaliações
- Turbo ConDocumento3 páginasTurbo ConMaykol RoncalAinda não há avaliações
- Los Tipos de CarroceríasDocumento26 páginasLos Tipos de CarroceríasJerry Sf Dff MorenoAinda não há avaliações
- Informe Inyeccion ElectronicaDocumento18 páginasInforme Inyeccion ElectronicafabinhobajAinda não há avaliações
- Componentes y Aspectos Basicos de La Maquinaria PesadaDocumento11 páginasComponentes y Aspectos Basicos de La Maquinaria PesadaEstefany Stoker100% (1)
- Sist. distribución: funciones y tipos OHV OHC SVDocumento6 páginasSist. distribución: funciones y tipos OHV OHC SVpatric telloAinda não há avaliações
- Informe 1 Embrague MonodiscoDocumento20 páginasInforme 1 Embrague MonodiscoStevin BonifazAinda não há avaliações
- Motores HidraulicosDocumento10 páginasMotores HidraulicosFernando YaelAinda não há avaliações
- Nte Inen 2902Documento34 páginasNte Inen 2902geragabiAinda não há avaliações
- Dinámica Del Automóvil IEEEDocumento15 páginasDinámica Del Automóvil IEEEAngel MingaAinda não há avaliações
- Tarea Válvulas HidraulicasDocumento19 páginasTarea Válvulas HidraulicasOscar LópezAinda não há avaliações
- Bomba de Inyeccion LinealDocumento3 páginasBomba de Inyeccion Linealmaribel marleni soliz padillaAinda não há avaliações
- Bomba LinealDocumento15 páginasBomba LinealArellys Yumi100% (1)
- Motores DieselDocumento50 páginasMotores DieselTibu SaltoAinda não há avaliações
- CONFORMADORESDocumento7 páginasCONFORMADORESAnonymous YsSJ2eLrgAinda não há avaliações
- Aplicacion Práctica Motores de 2 TiemposDocumento23 páginasAplicacion Práctica Motores de 2 TiemposIsaacAinda não há avaliações
- Artículo de Investigación (Sistemas de Sobrealimentación Del Automóvil)Documento11 páginasArtículo de Investigación (Sistemas de Sobrealimentación Del Automóvil)David Arturo Del Castillo FreireAinda não há avaliações
- Quien Invento El CompresorDocumento52 páginasQuien Invento El CompresorRodelby Seproca BravoAinda não há avaliações
- Manual Senati Hidraulica 1Documento219 páginasManual Senati Hidraulica 1Jesus Estiben Torpoco100% (1)
- Eje de TransmisiónDocumento6 páginasEje de TransmisiónMateo PeñaAinda não há avaliações
- Cargador FrontalDocumento31 páginasCargador Frontalgaydy lanzaAinda não há avaliações
- Sistemas de frenos en automóvilesDocumento15 páginasSistemas de frenos en automóvilesJesus Edgardo Prado OrtizAinda não há avaliações
- Tren de FuerzaDocumento6 páginasTren de FuerzaRene Guevara Hernandez100% (1)
- Las ventajas de la tracción integral permanenteDocumento2 páginasLas ventajas de la tracción integral permanentejoseAinda não há avaliações
- Chasis o Bastidor IDocumento20 páginasChasis o Bastidor IAdemar CadenaAinda não há avaliações
- Tractores Agricolas de CadenaDocumento14 páginasTractores Agricolas de CadenaEzequiel Perez MendozaAinda não há avaliações
- Consumo de Combustible TractoresDocumento4 páginasConsumo de Combustible TractoresFred Rojas100% (1)
- Vacío motor combustiónDocumento4 páginasVacío motor combustiónAlvaruAlomotoAinda não há avaliações
- Dirección Asistida EléctricaDocumento4 páginasDirección Asistida EléctricabryanAinda não há avaliações
- El Motor de Encendido Por CompresiónDocumento14 páginasEl Motor de Encendido Por CompresiónVargas LuisAinda não há avaliações
- Tractor de OrugasDocumento57 páginasTractor de OrugasRenatoAinda não há avaliações
- Inyeccion de Combustible en Motores DieselDocumento9 páginasInyeccion de Combustible en Motores DieselYeiner Alfredo Liñan CostaAinda não há avaliações
- Desensamble de CulataDocumento9 páginasDesensamble de CulataBrayan Coyuri LopezAinda não há avaliações
- Grua Pico PatoDocumento7 páginasGrua Pico PatoCarlos Llontop YaipenAinda não há avaliações
- Energía eólica: componentes y funcionamiento aerogeneradorDocumento15 páginasEnergía eólica: componentes y funcionamiento aerogeneradorJesus MejiaAinda não há avaliações
- Trabajo Lubricacion AutomaticaDocumento8 páginasTrabajo Lubricacion AutomaticaCRISS RYUZAKYAinda não há avaliações
- Funcionamiento Electrohidráulico RetroexcavadoraDocumento7 páginasFuncionamiento Electrohidráulico RetroexcavadoraFrancisco VizcaìnoAinda não há avaliações
- Maquinarias Mineras en El Desarrollo de Sus EtapasDocumento16 páginasMaquinarias Mineras en El Desarrollo de Sus EtapasLeticia Campos OlivaresAinda não há avaliações
- Informe Formato Aquinaria PesadaDocumento11 páginasInforme Formato Aquinaria PesadaRuben DeirioAinda não há avaliações
- Retroexcavadora-CaracterísticasDocumento24 páginasRetroexcavadora-CaracterísticasAaronAinda não há avaliações
- Mantenimiento, preparación y manejo de tractores. AGAF0108No EverandMantenimiento, preparación y manejo de tractores. AGAF0108Ainda não há avaliações
- Reglamento A Ley de Transporte Terrestre-Transito y Seguridad Vial PDFDocumento91 páginasReglamento A Ley de Transporte Terrestre-Transito y Seguridad Vial PDFEstalin RomeroAinda não há avaliações
- Programa Analítico de La AsignaturaDocumento2 páginasPrograma Analítico de La AsignaturaTatyTorresAinda não há avaliações
- Sistemas de Encendido AutomotrizDocumento14 páginasSistemas de Encendido AutomotrizTatyTorresAinda não há avaliações
- Programa Analítico de La AsignaturaDocumento2 páginasPrograma Analítico de La AsignaturaTatyTorresAinda não há avaliações
- Alvarez Torres FotosDocumento18 páginasAlvarez Torres FotosTatyTorresAinda não há avaliações
- Suspension1 PDFDocumento103 páginasSuspension1 PDFTatyTorresAinda não há avaliações
- Coip EcuadorDocumento330 páginasCoip EcuadorAlexis MGAinda não há avaliações
- Normas INENDocumento17 páginasNormas INENDiego QuituisacaAinda não há avaliações
- Suspension1 PDFDocumento103 páginasSuspension1 PDFTatyTorresAinda não há avaliações
- 2 Electrohidráulic PowerpointDocumento24 páginas2 Electrohidráulic PowerpointTatyTorresAinda não há avaliações
- Neuma TicosDocumento95 páginasNeuma TicosTatyTorresAinda não há avaliações
- Variador de AvanceDocumento17 páginasVariador de AvanceTatyTorres100% (3)
- Variador de AvanceDocumento17 páginasVariador de AvanceTatyTorres100% (3)
- Deontologia PreguntasDocumento4 páginasDeontologia PreguntasTatyTorresAinda não há avaliações
- Introducción A La Convección: Transferencia de Energía Entre Una Superficie Y Un Fluido Que Se Mueve Sobre ÉstaDocumento36 páginasIntroducción A La Convección: Transferencia de Energía Entre Una Superficie Y Un Fluido Que Se Mueve Sobre ÉstaTatyTorresAinda não há avaliações
- Deontologia PreguntasDocumento4 páginasDeontologia PreguntasTatyTorresAinda não há avaliações
- 2 Inversor de Corriente 11Documento23 páginas2 Inversor de Corriente 11TatyTorresAinda não há avaliações
- Trabajo de ElectricidadDocumento33 páginasTrabajo de ElectricidadTatyTorresAinda não há avaliações
- Seminario ProyectoDocumento22 páginasSeminario ProyectoTatyTorresAinda não há avaliações
- Diseño y Construcción de Un Viscosímetro Saybolt y Su Implementación Como Instrumento DidácticoDocumento7 páginasDiseño y Construcción de Un Viscosímetro Saybolt y Su Implementación Como Instrumento DidácticomiltoncobaAinda não há avaliações
- Lab4 MultiplicadorVerilogDocumento7 páginasLab4 MultiplicadorVerilogRCAinda não há avaliações
- Trabajo Integrador Intercicloecuaciones 1Documento8 páginasTrabajo Integrador Intercicloecuaciones 1TatyTorresAinda não há avaliações
- Deber MetodosDocumento2 páginasDeber MetodosTatyTorresAinda não há avaliações
- Lab Tribologia DR Andres LopezDocumento47 páginasLab Tribologia DR Andres LopezBIAHUIAinda não há avaliações
- 5 Ejercicios de Propieades Mecanicas VacanasoDocumento9 páginas5 Ejercicios de Propieades Mecanicas VacanasoEstudiante Ingenieria80% (5)
- Formato RiDocumento2 páginasFormato RiTatyTorres0% (1)
- Nte Inen 1155Documento18 páginasNte Inen 1155TatyTorresAinda não há avaliações
- Deber Metodos NumericosDocumento2 páginasDeber Metodos NumericosTatyTorresAinda não há avaliações
- Archivo Recuperado 1Documento12 páginasArchivo Recuperado 1TatyTorresAinda não há avaliações
- Syllabus-Diseño Térmico PDFDocumento6 páginasSyllabus-Diseño Térmico PDFFernando VelascoAinda não há avaliações
- Metrados GrassDocumento53 páginasMetrados GrassJorge RenattoAinda não há avaliações
- MR372J8487G050 PDFDocumento103 páginasMR372J8487G050 PDFjose100% (1)
- Ing. Wilson Montoya Navarro - CVDocumento5 páginasIng. Wilson Montoya Navarro - CVWilson Montoya NavarroAinda não há avaliações
- Beguip 01Documento32 páginasBeguip 01jakjkjkasAinda não há avaliações
- Norma NTG 41085-Gua Instalacin de Adoquines PDFDocumento43 páginasNorma NTG 41085-Gua Instalacin de Adoquines PDFLuis JimenezAinda não há avaliações
- Taller de TesisDocumento8 páginasTaller de TesisOmar Bazán NavarroAinda não há avaliações
- Diptico PetroquimicaDocumento2 páginasDiptico PetroquimicaGilbert JapayAinda não há avaliações
- TAREA UNIDAD 01 Eleccion de La Organizacion Descripcion Generacion de Matriz IPER Mapa de RiesgosDocumento9 páginasTAREA UNIDAD 01 Eleccion de La Organizacion Descripcion Generacion de Matriz IPER Mapa de RiesgosZonexGroneXd0% (1)
- Análisis de Falla de Un Eje de Piñón Cónico de Maquinaria AgrícolaDocumento7 páginasAnálisis de Falla de Un Eje de Piñón Cónico de Maquinaria AgrícolaPablo German TouriñanAinda não há avaliações
- La Documentación Técnica de Obra. Los Planos MunicipalesDocumento21 páginasLa Documentación Técnica de Obra. Los Planos Municipalescampusvirtualort92% (12)
- Altos Explosivos - Agentes de VoladuraDocumento49 páginasAltos Explosivos - Agentes de VoladuramarcoAinda não há avaliações
- PMA Mejoramiento de Los Canales de Riego RinconadaDocumento41 páginasPMA Mejoramiento de Los Canales de Riego RinconadaRodrigo ValeroAinda não há avaliações
- Universidad Mariano Galvez de Guatemala: Ingenieria Industrial Diario Vespertina Acta 35-17 9.04 2017-05-24Documento2 páginasUniversidad Mariano Galvez de Guatemala: Ingenieria Industrial Diario Vespertina Acta 35-17 9.04 2017-05-24Alejandro GarciaAinda não há avaliações
- Adendo 1 Cargue, Amarre y Transporte de TuberíaDocumento8 páginasAdendo 1 Cargue, Amarre y Transporte de TuberíaAnonymous goIn6wA3K100% (1)
- Horarios UnegDocumento22 páginasHorarios UnegAlexander Rojas GAinda não há avaliações
- TiposCartaDocumento25 páginasTiposCartaIngrid Fiorella Vargas GutierrezAinda não há avaliações
- Funcionamiento Del Motor de Dos TiemposDocumento10 páginasFuncionamiento Del Motor de Dos TiempospadramioAinda não há avaliações
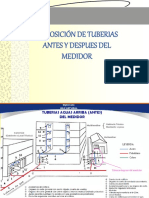
- Accesorios para La Instalacion de Agua PotableDocumento4 páginasAccesorios para La Instalacion de Agua PotableColleen Callahan100% (1)
- Análisis Sistémico de Objeto Técnico La Maquina de CoserDocumento13 páginasAnálisis Sistémico de Objeto Técnico La Maquina de CoserIng. Gerardo Sánchez Nájera20% (5)
- Antologia Artes 3 Bloque 4Documento30 páginasAntologia Artes 3 Bloque 4Diana RangelAinda não há avaliações
- GNRGD Cdo 005 Pts 12 AnexoDocumento63 páginasGNRGD Cdo 005 Pts 12 Anexovalaypfb0% (1)
- Tema 2Documento33 páginasTema 2Mijhael FernandezAinda não há avaliações
- Costos en El Analisis de Precios Unitarios, Indice Cac, Mayo 2019.Documento37 páginasCostos en El Analisis de Precios Unitarios, Indice Cac, Mayo 2019.Juan Carlos Zordan100% (1)
- Ficha General Powercem (V 2)Documento1 páginaFicha General Powercem (V 2)ciber360 JiquipilasAinda não há avaliações
- Tp.-Elaboración Del CementoDocumento4 páginasTp.-Elaboración Del CementoIsrael Aruquipa SilvaAinda não há avaliações
- Rendimiento y Productividad de Equipos en MineriaDocumento37 páginasRendimiento y Productividad de Equipos en MineriaJoseph Vasquez100% (1)
- Cargador Frontal y ExcavadoraDocumento3 páginasCargador Frontal y ExcavadoraFelipe Eduardo Guzmán SilvaAinda não há avaliações
- Biodigestores en El PerúDocumento14 páginasBiodigestores en El PerúArturo YepezAinda não há avaliações
- Unidad 3 Proceso-De-Cambio-De-Forma-A-MaterialesDocumento53 páginasUnidad 3 Proceso-De-Cambio-De-Forma-A-Materialescame2475% (4)