Você também pode gostar
- XS 400B-03Documento13 páginasXS 400B-03George Vasiliou100% (11)
- Cutler Hammer. SV9000 AF Drives - Application ManualDocumento60 páginasCutler Hammer. SV9000 AF Drives - Application ManualmamasitaricaAinda não há avaliações
- Agricultural Extension and CommunicationDocumento173 páginasAgricultural Extension and CommunicationAlfredo Conde100% (1)
- Tsang Mui Millennium School 2019-2020 English Worksheet: Fill in The Blanks With The Correct Form of The VerbsDocumento46 páginasTsang Mui Millennium School 2019-2020 English Worksheet: Fill in The Blanks With The Correct Form of The VerbscocoyipAinda não há avaliações
- Chapter 1 Cumulative Review: Multiple ChoiceDocumento2 páginasChapter 1 Cumulative Review: Multiple ChoiceJ. LeeAinda não há avaliações
- PG Feedback Vector Control (Speed) : Application Guideline 14.2Documento4 páginasPG Feedback Vector Control (Speed) : Application Guideline 14.2Ari SutejoAinda não há avaliações
- Quick CommissioningDocumento5 páginasQuick CommissioningjccAinda não há avaliações
- Application Note AN-LM2A-0005v120EN: Vector Control With Peripheral PG (Synchronous Motor)Documento12 páginasApplication Note AN-LM2A-0005v120EN: Vector Control With Peripheral PG (Synchronous Motor)TroubleshootingAinda não há avaliações
- C2000 Driving IM With TQC+PG: Devices and ToolsDocumento5 páginasC2000 Driving IM With TQC+PG: Devices and ToolsHamidAinda não há avaliações
- Optidrive Elevator Quick Start-Up Guide V1.00Documento5 páginasOptidrive Elevator Quick Start-Up Guide V1.00Mohammad ElnewehiAinda não há avaliações
- F700 Quick Set Up GuideDocumento2 páginasF700 Quick Set Up GuideНебојша МитровићAinda não há avaliações
- C2000 and PM Motor Installation GuideDocumento6 páginasC2000 and PM Motor Installation GuideMuhamad Sayid Akil MhsAkilAinda não há avaliações
- A F700 PID ControlDocumento8 páginasA F700 PID ControlPham LongAinda não há avaliações
- 6R6RA70 Calculation ParametersDocumento3 páginas6R6RA70 Calculation Parameterssanjaya srivastavaAinda não há avaliações
- Sepac Elevator Easy Commissioning StepsDocumento3 páginasSepac Elevator Easy Commissioning StepsAnderley QuinteroAinda não há avaliações
- Fuji FRENICmulti pg3 ManualDocumento3 páginasFuji FRENICmulti pg3 ManualSajad DehghanAinda não há avaliações
- Guide To Drive Spindle Motor With LAPOND SVD-PS VFDDocumento4 páginasGuide To Drive Spindle Motor With LAPOND SVD-PS VFDRahul AmaraAinda não há avaliações
- 14.1 G9 PG Vector Control App Note 6529Documento4 páginas14.1 G9 PG Vector Control App Note 6529Enrique MalmaAinda não há avaliações
- 02Y250512 ElecLine Shaftrs14616Documento12 páginas02Y250512 ElecLine Shaftrs14616rezakaihaniAinda não há avaliações
- MM440 CommissioningDocumento7 páginasMM440 Commissioningersanjeeb_456Ainda não há avaliações
- Frenic MEGA INR-SI47-1582-E-6th SW VersionDocumento26 páginasFrenic MEGA INR-SI47-1582-E-6th SW VersionSankuparlang ShullaiAinda não há avaliações
- Manual and Remote Start Unit With Key Switch, 72x72 DIN SizeDocumento9 páginasManual and Remote Start Unit With Key Switch, 72x72 DIN SizeRaja Bilal LatifAinda não há avaliações
- 06 - Setpoint ChannelDocumento21 páginas06 - Setpoint ChannelSincro AutomatizacionesAinda não há avaliações
- Lect 4 PDFDocumento14 páginasLect 4 PDFSaif AlabdullahAinda não há avaliações
- Tip22 e PDFDocumento6 páginasTip22 e PDFThanh BaronAinda não há avaliações
- CM2000 PDFDocumento24 páginasCM2000 PDFJuan Felipe Vanegas VargasAinda não há avaliações
- EPS-BS User ManualDocumento8 páginasEPS-BS User ManualFeras AljaiousiAinda não há avaliações
- Sinamics g120 Ac DrivesDocumento10 páginasSinamics g120 Ac DrivesPandu Birumakovela0% (1)
- Auto Tune For InductionDocumento2 páginasAuto Tune For InductiontoufikAinda não há avaliações
- Quick SetupDocumento15 páginasQuick SetupIngeniería AplicacionesAinda não há avaliações
- Starting Guide: Frenic LiftDocumento14 páginasStarting Guide: Frenic LiftخالدعبداللهAinda não há avaliações
- Tip23 e PDFDocumento4 páginasTip23 e PDFThanh BaronAinda não há avaliações
- Output Voltage PID F7 Drive Software Technical ManualDocumento8 páginasOutput Voltage PID F7 Drive Software Technical ManualphysicudoAinda não há avaliações
- TM G5SW 045Documento13 páginasTM G5SW 045HumbertoAinda não há avaliações
- 6RA80 Quick Commissioning Without TachoDocumento7 páginas6RA80 Quick Commissioning Without TachoBaldev SinghAinda não há avaliações
- HP Drive (FAR)Documento2 páginasHP Drive (FAR)kaami.am68Ainda não há avaliações
- C2000 Drive IM With FOC+PGDocumento4 páginasC2000 Drive IM With FOC+PGGlenn GangaAinda não há avaliações
- BST2100 Technical ManualDocumento18 páginasBST2100 Technical ManualOsama OdehAinda não há avaliações
- Basic Parameter Setting Needs To Be Done To Run Two Servo and One Spindle - For 0i-FDocumento6 páginasBasic Parameter Setting Needs To Be Done To Run Two Servo and One Spindle - For 0i-FAdvance CNC TechnologiesAinda não há avaliações
- C2000 Drive IM With TQC Sensorless PDFDocumento4 páginasC2000 Drive IM With TQC Sensorless PDFDmitry VALEGURAAinda não há avaliações
- EPS BS UserManualDocumento8 páginasEPS BS UserManualImran RasheedAinda não há avaliações
- Manuelle Feldkennlinienaufnahme 76 PDFDocumento4 páginasManuelle Feldkennlinienaufnahme 76 PDFdangthutqmAinda não há avaliações
- Ls Inverter Ic5Documento20 páginasLs Inverter Ic5lamonahAinda não há avaliações
- Tài Liệu Biến Tần LS IC5Documento20 páginasTài Liệu Biến Tần LS IC5hieudaivuongAinda não há avaliações
- AS320 InverterDocumento43 páginasAS320 Inverterthi tranAinda não há avaliações
- f7z 8162 Villamos Tengely SzoftverDocumento12 páginasf7z 8162 Villamos Tengely SzoftverrezakaihaniAinda não há avaliações
- How To Use Integrated Pulse Outputs For Open-Loop Control Positioning With A Stepper Motor - YazdırılıyorDocumento5 páginasHow To Use Integrated Pulse Outputs For Open-Loop Control Positioning With A Stepper Motor - YazdırılıyorDemet YılmazAinda não há avaliações
- Fanuc Spindles TroublesDocumento20 páginasFanuc Spindles TroublesCRISENTENA0% (1)
- Teco E510 Quick Start Guide en v1Documento8 páginasTeco E510 Quick Start Guide en v1Fabian Vazquez OrtegaAinda não há avaliações
- BLDC 08 H DriveDocumento9 páginasBLDC 08 H DriveMuhammad IrfanAinda não há avaliações
- Manual and Remote Start Unit With Key Switch, 72x72 DIN SizeDocumento8 páginasManual and Remote Start Unit With Key Switch, 72x72 DIN SizeKola Wad DarragAinda não há avaliações
- Guide Book - L7S Speed E V1.1Documento21 páginasGuide Book - L7S Speed E V1.1huylong101Ainda não há avaliações
- JKBLD750 ManualDocumento15 páginasJKBLD750 Manualvicuaduoc1Ainda não há avaliações
- Mach3 Spindle ControlDocumento7 páginasMach3 Spindle ControlajaxleonAinda não há avaliações
- Combivert F5-General / Basic HardwareDocumento48 páginasCombivert F5-General / Basic HardwareVijaya KumarAinda não há avaliações
- Previous Pageblock Return To Previous Menu Next Pageblock: Pratt & WhitneyDocumento41 páginasPrevious Pageblock Return To Previous Menu Next Pageblock: Pratt & WhitneyKarina FloresAinda não há avaliações
- TECO E510 Inverter. Quick Start Guide. Step 1. Supply & Motor ConnectionDocumento9 páginasTECO E510 Inverter. Quick Start Guide. Step 1. Supply & Motor Connectionتكنو ليفتAinda não há avaliações
- Mid Presentation PLCDocumento40 páginasMid Presentation PLCGOD oF DeAtHAinda não há avaliações
- Siemens Micromaster 420 VFD Setting (Analog Input + Fixed Speed)Documento1 páginaSiemens Micromaster 420 VFD Setting (Analog Input + Fixed Speed)Rinu RavikumarAinda não há avaliações
- XCS2009,11 ManualDocumento7 páginasXCS2009,11 ManualsamadAinda não há avaliações
- NICE900 Setup Manual Asyn-Syn Genesis Motor With Encoder Dated 30-07-19-1Documento7 páginasNICE900 Setup Manual Asyn-Syn Genesis Motor With Encoder Dated 30-07-19-1Ks BharathiyarAinda não há avaliações
- NICE900 - Door Drive Setup Manual For Asynchronous / Synchronous Motor With Encoder FeedbackDocumento26 páginasNICE900 - Door Drive Setup Manual For Asynchronous / Synchronous Motor With Encoder FeedbackMehedi HasanAinda não há avaliações
- Planning & Cost Control Engineer (Primavera & MS Project) : Aouache FaridDocumento3 páginasPlanning & Cost Control Engineer (Primavera & MS Project) : Aouache FaridFarid FaridAinda não há avaliações
- Alzheimer's Disease Inhalational Alzheimer's Disease An UnrecognizedDocumento10 páginasAlzheimer's Disease Inhalational Alzheimer's Disease An UnrecognizednikoknezAinda não há avaliações
- Vanilla Farming: The Way Forward: July 2019Documento6 páginasVanilla Farming: The Way Forward: July 2019mituAinda não há avaliações
- Bams 1st Rachna Sharir Joints and Their Classification 16-05-2020Documento15 páginasBams 1st Rachna Sharir Joints and Their Classification 16-05-2020Sanjana SajjanarAinda não há avaliações
- HART - Wikipedia, The Free EncyclopediaDocumento3 páginasHART - Wikipedia, The Free EncyclopediakalyanupdownAinda não há avaliações
- The Greek LettersDocumento18 páginasThe Greek LettersSupreet GuptaAinda não há avaliações
- 2019 BMS1021 Practice Questions Answers PDFDocumento12 páginas2019 BMS1021 Practice Questions Answers PDFaskldhfdasjkAinda não há avaliações
- Lesson 2 Arts of East AsiaDocumento21 páginasLesson 2 Arts of East Asiarenaldo ocampoAinda não há avaliações
- Module 1 Hvac Basics Chapter-1Documento5 páginasModule 1 Hvac Basics Chapter-1KHUSHBOOAinda não há avaliações
- GEHC Service Manual CARESCAPE Monitor B850 v1 2011Documento172 páginasGEHC Service Manual CARESCAPE Monitor B850 v1 2011NguyễnCảnhBắcAinda não há avaliações
- 2011 33 MaintenanceDocumento16 páginas2011 33 MaintenanceKrishna Khandige100% (1)
- Scattered Pearls: Selected Sayings and Anecdotes of The Illustrious AuliyaaDocumento103 páginasScattered Pearls: Selected Sayings and Anecdotes of The Illustrious AuliyaaYeye17100% (1)
- Indian Standard: Methods of Chemical Testing of LeatherDocumento75 páginasIndian Standard: Methods of Chemical Testing of LeatherAshish DixitAinda não há avaliações
- Sr. IBS DAS Consultant EngineerDocumento4 páginasSr. IBS DAS Consultant EngineerMohamed KamalAinda não há avaliações
- BÀI TẬP TA 9 THEO CHUYÊN ĐỀ NGỮ PHÁPDocumento213 páginasBÀI TẬP TA 9 THEO CHUYÊN ĐỀ NGỮ PHÁPhoangmaiAinda não há avaliações
- MGE UPS Comissioning GuideDocumento19 páginasMGE UPS Comissioning GuideAldo Rodriguez MaturanaAinda não há avaliações
- Materi Asking and Offering For HelpDocumento9 páginasMateri Asking and Offering For HelpFranky ArdanaAinda não há avaliações
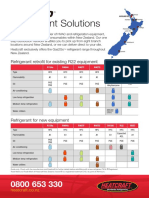
- Refrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentDocumento2 páginasRefrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentpriyoAinda não há avaliações
- Dead Zone I Air AgeDocumento7 páginasDead Zone I Air AgeJaponec PicturesAinda não há avaliações
- A Slice of History - Pizza Turim 4-7-15Documento2 páginasA Slice of History - Pizza Turim 4-7-15Mae Princess BolivarAinda não há avaliações
- Intro To BiochemDocumento2 páginasIntro To BiochemPeachy PieAinda não há avaliações
- Dumel James Melchor DuayDocumento3 páginasDumel James Melchor DuayBle DuayAinda não há avaliações
- 0707-Passive VoiceDocumento6 páginas0707-Passive VoiceKhôi TrầnAinda não há avaliações
- The Art of Logical ThinkingDocumento210 páginasThe Art of Logical ThinkingAndyAyam100% (1)
- Agricultural Machinery in PakistanDocumento19 páginasAgricultural Machinery in PakistanBadar NiaziAinda não há avaliações
- Leica Rugby 320 410 420 BRO En-1Documento6 páginasLeica Rugby 320 410 420 BRO En-1luigiabeAinda não há avaliações
- 801 Aeronca PDFDocumento17 páginas801 Aeronca PDFVishveshAinda não há avaliações