Você também pode gostar
- Impact 2Documento15 páginasImpact 2Shoaib MalikAinda não há avaliações
- Molecular Dynamics Simulations: Erik LindahlDocumento24 páginasMolecular Dynamics Simulations: Erik LindahlKübra KahveciAinda não há avaliações
- Behaviour of Strain-Hardening Cement-Based Composites (SHCC) Under Monotonic and Cyclic Tensile LoadingDocumento9 páginasBehaviour of Strain-Hardening Cement-Based Composites (SHCC) Under Monotonic and Cyclic Tensile LoadingUDDOM CHHENGAinda não há avaliações
- Damping ModelsDocumento23 páginasDamping ModelsgarystevensozAinda não há avaliações
- Modeling The Nonlinear Hysteretic Response in DAE Experiments of Berea Sandstone: A Case-StudyDocumento9 páginasModeling The Nonlinear Hysteretic Response in DAE Experiments of Berea Sandstone: A Case-StudyAndika PerbawaAinda não há avaliações
- Shi 2017Documento20 páginasShi 2017ifb.mirzaAinda não há avaliações
- Accepted Manuscript: Composites Part BDocumento24 páginasAccepted Manuscript: Composites Part BoiuAinda não há avaliações
- Spees Et Al 2002 Substitution Reactions of Inorganic Complexes Concerning The Prediction of Activation Energies andDocumento10 páginasSpees Et Al 2002 Substitution Reactions of Inorganic Complexes Concerning The Prediction of Activation Energies andManadip SutradharAinda não há avaliações
- KrivovSV FreeEnergySurface RevProteinFolding MDS PLoS 2009 5 7 E1000428Documento10 páginasKrivovSV FreeEnergySurface RevProteinFolding MDS PLoS 2009 5 7 E1000428jazmurdochAinda não há avaliações
- International Journal of Solids and Structures: Jean-Marc Pipard, Tudor Balan, Farid Abed-Meraim, Xavier LemoineDocumento10 páginasInternational Journal of Solids and Structures: Jean-Marc Pipard, Tudor Balan, Farid Abed-Meraim, Xavier LemoineChiheb BaAinda não há avaliações
- 1 3180066Documento5 páginas1 3180066matias79Ainda não há avaliações
- Beigelzimer (1994) Continuum Model of The Structural-Inhomogeneous Porous Body and Its Application For The Study of Stability and Viscous FractureDocumento12 páginasBeigelzimer (1994) Continuum Model of The Structural-Inhomogeneous Porous Body and Its Application For The Study of Stability and Viscous FractureЯн БейгельзимерAinda não há avaliações
- Al, Nouh - 2017 - Mechanics of Longitudinal and Flexural Locally Resonant Elastic Metamaterials Using A Structural Power Flow ApproachDocumento14 páginasAl, Nouh - 2017 - Mechanics of Longitudinal and Flexural Locally Resonant Elastic Metamaterials Using A Structural Power Flow ApproachTran Tuan MinhAinda não há avaliações
- Molecular Dynamic SimulationDocumento9 páginasMolecular Dynamic Simulationaishwarya vijayAinda não há avaliações
- Oscillatory Di Ffusion and Second-Order Cyclostationarity in Alanine Tripeptide From Molecular Dynamics SimulationDocumento11 páginasOscillatory Di Ffusion and Second-Order Cyclostationarity in Alanine Tripeptide From Molecular Dynamics SimulationNiladriAinda não há avaliações
- (2017) Cremer, P., Heinen, M., Menzel, A.M., Löwen, H.Documento14 páginas(2017) Cremer, P., Heinen, M., Menzel, A.M., Löwen, H.Fattah Maulana AlanAinda não há avaliações
- Modeling and Experiments of Buckling Modes and Deflection of Fixed-Guided Beams in Compliant MechDocumento10 páginasModeling and Experiments of Buckling Modes and Deflection of Fixed-Guided Beams in Compliant MechmikelaxnAinda não há avaliações
- Renewable and Sustainable Energy Reviews 77 (2017) 131-146Documento16 páginasRenewable and Sustainable Energy Reviews 77 (2017) 131-146elderwanAinda não há avaliações
- Quantized Plastic DeformationDocumento49 páginasQuantized Plastic Deformationtivaga3618Ainda não há avaliações
- Ao 33 001735Documento14 páginasAo 33 001735Ana Candelaria Dávila PérezAinda não há avaliações
- Ab Initio Electronic Transport Model With Explicit Solution To The LinearizedDocumento14 páginasAb Initio Electronic Transport Model With Explicit Solution To The Linearizedright12351Ainda não há avaliações
- Measurements of The Forces in Protein InteractionsDocumento28 páginasMeasurements of The Forces in Protein InteractionsBushra Altaf ChowdhuryAinda não há avaliações
- Hard Versus Soft Impact ModelingDocumento15 páginasHard Versus Soft Impact Modelingstephane.benardAinda não há avaliações
- Optical-Force Laws For Guided Light in Linear Media: PHYSICAL REVIEW A 100, 013835 (2019)Documento7 páginasOptical-Force Laws For Guided Light in Linear Media: PHYSICAL REVIEW A 100, 013835 (2019)Denis JaissonAinda não há avaliações
- Continuum ApproximationsDocumento41 páginasContinuum ApproximationsJohn WongAinda não há avaliações
- A Charge Equilibration Formalism For Treating Charge Transfer Effects in MD SimulationsDocumento21 páginasA Charge Equilibration Formalism For Treating Charge Transfer Effects in MD SimulationsdebmallyAinda não há avaliações
- Colloids and Surfaces A: Physicochemical and Engineering AspectsDocumento8 páginasColloids and Surfaces A: Physicochemical and Engineering AspectsMischelle SantosAinda não há avaliações
- Rcmpaper Ijss 2004Documento29 páginasRcmpaper Ijss 2004Ivan Katchanovski falsifierAinda não há avaliações
- Carpinteri 1997 N.184 CSFDocumento16 páginasCarpinteri 1997 N.184 CSFFrancesco MontagnoliAinda não há avaliações
- Ortiz (1985) - A Constitutive Theory For The Inelastic Behavior of ConcreteDocumento27 páginasOrtiz (1985) - A Constitutive Theory For The Inelastic Behavior of ConcreteSalvatore MirandaAinda não há avaliações
- A Continuum-Based Reaction Growth Model For The Shock Initiation of ExplosivesDocumento11 páginasA Continuum-Based Reaction Growth Model For The Shock Initiation of ExplosivesWahid AziziAinda não há avaliações
- Optimized Interaction For Targeted Self Assembly Stillinger PRL 2003Documento4 páginasOptimized Interaction For Targeted Self Assembly Stillinger PRL 2003keshariAinda não há avaliações
- A Fluid-Mechanical Model of Elastocapillary Coalescence: Bykiransingh, Johnr. Lister DominicvellaDocumento25 páginasA Fluid-Mechanical Model of Elastocapillary Coalescence: Bykiransingh, Johnr. Lister DominicvellasreenathAinda não há avaliações
- Synthon Ranking-Gavezzotti DunitzDocumento5 páginasSynthon Ranking-Gavezzotti DunitzarvindmsnAinda não há avaliações
- Tmp121a TMPDocumento12 páginasTmp121a TMPFrontiersAinda não há avaliações
- 2023 - A Novel Finite Fracture Mechanics Approach To Assess The Lifetime of Notched ComponentsDocumento9 páginas2023 - A Novel Finite Fracture Mechanics Approach To Assess The Lifetime of Notched ComponentsSainath JadhavAinda não há avaliações
- QMMM MethodDocumento8 páginasQMMM MethodSubarnaAinda não há avaliações
- A Three Step Recipe For Designing Auxetic Materials On DemandDocumento9 páginasA Three Step Recipe For Designing Auxetic Materials On DemandSharayjAinda não há avaliações
- Kabaldin 2007Documento6 páginasKabaldin 2007MoqaAinda não há avaliações
- The Kronig-Penney Model Extended To Arbitrary PoteDocumento10 páginasThe Kronig-Penney Model Extended To Arbitrary PoteMarlene Martínez SantoyoAinda não há avaliações
- Paper ExampleDocumento11 páginasPaper ExampleJessica AlejandraAinda não há avaliações
- Dynamic Mechanical Analysis in Coatings Industry: Willi Schlesing, Maren Buhk, Michael OsterholdDocumento12 páginasDynamic Mechanical Analysis in Coatings Industry: Willi Schlesing, Maren Buhk, Michael OsterholdSenthil KumarAinda não há avaliações
- Whole-Body Impedance What Does It Measure?"2: Kenneth R Foster and Henry C LukaskiDocumento9 páginasWhole-Body Impedance What Does It Measure?"2: Kenneth R Foster and Henry C LukaskiMugahid AbdoAinda não há avaliações
- (1990) Dynamic Response of Structures With Uncertain DampingDocumento7 páginas(1990) Dynamic Response of Structures With Uncertain DampingguillermoAinda não há avaliações
- Measurement of Synamic Properties of Rubber (About Dif Tan Delta)Documento7 páginasMeasurement of Synamic Properties of Rubber (About Dif Tan Delta)seran ünalAinda não há avaliações
- Potential energy functions for atomic solidsDocumento16 páginasPotential energy functions for atomic solidsMudavath Babu RamAinda não há avaliações
- Theoretical Aspects of A Discrete-Binding Approach in Quartz-Crystal Microbalance Acoustic BiosensingDocumento22 páginasTheoretical Aspects of A Discrete-Binding Approach in Quartz-Crystal Microbalance Acoustic BiosensingpsephisAinda não há avaliações
- Loop Formation and Translational Diffusion of Intrinsically DisorderedDocumento12 páginasLoop Formation and Translational Diffusion of Intrinsically Disorderedmanzhou1986Ainda não há avaliações
- Molecular DynamicsDocumento16 páginasMolecular DynamicsNimesh Singh100% (1)
- Sali Structure 2005Documento3 páginasSali Structure 2005hahahaAinda não há avaliações
- JMolModel 6 396 2000Documento17 páginasJMolModel 6 396 2000Syed Iftikhar Hussain ShahAinda não há avaliações
- A Contact Force Model With Hysteresis Damping For Impact Analysis ofDocumento9 páginasA Contact Force Model With Hysteresis Damping For Impact Analysis ofMatheus rampazzo e silvaAinda não há avaliações
- 10 1021@ma0007942 PDFDocumento13 páginas10 1021@ma0007942 PDForeamigAinda não há avaliações
- Dynamic Prestress in A Globular Protein: Scott A. Edwards, Johannes Wagner, Frauke Gra TerDocumento11 páginasDynamic Prestress in A Globular Protein: Scott A. Edwards, Johannes Wagner, Frauke Gra Terfelipe_catenAinda não há avaliações
- Behavior of Reinforced Concrete Elements Under Cyclic Shear. II: Theoretical ModelDocumento12 páginasBehavior of Reinforced Concrete Elements Under Cyclic Shear. II: Theoretical ModelMarimuthu KaliyamoorthyAinda não há avaliações
- Volume Fraction in CompositesDocumento11 páginasVolume Fraction in Compositeschetan_thakur4278Ainda não há avaliações
- 1963 - Hulburt - Katz - Some Problems in Particle TechnologyDocumento20 páginas1963 - Hulburt - Katz - Some Problems in Particle TechnologyAnonymous clLZmJAinda não há avaliações
- Hooke S Law and Material Science ProjectDocumento5 páginasHooke S Law and Material Science ProjectMisaelAinda não há avaliações
- Embedding Quantum Statistical Excitations in A Classical Force FieldDocumento17 páginasEmbedding Quantum Statistical Excitations in A Classical Force FieldCrainlyAinda não há avaliações
- Granular Materials at Meso-scale: Towards a Change of Scale ApproachNo EverandGranular Materials at Meso-scale: Towards a Change of Scale ApproachAinda não há avaliações
- Simple TestDocumento1 páginaSimple TestSamuel H. CaballeroAinda não há avaliações
- SensorsDocumento29 páginasSensorsMihai GrosuAinda não há avaliações
- Voltage F (X) CorelationDocumento21 páginasVoltage F (X) CorelationSamuel H. CaballeroAinda não há avaliações
- Fluid Mechanics 4e Solutions - Kundu CohenDocumento155 páginasFluid Mechanics 4e Solutions - Kundu CohenJoge Caracol93% (43)
- TVS Apache RTR 160 redesigned in four new colors with racing stripesDocumento4 páginasTVS Apache RTR 160 redesigned in four new colors with racing stripesSandeep Babu VannempalliAinda não há avaliações
- Scaling Pen Etd Our I AnDocumento5 páginasScaling Pen Etd Our I AnSamuel H. CaballeroAinda não há avaliações
- Sculpting Sandcastles Grain by Grain: Self-Assembled Sand TowersDocumento6 páginasSculpting Sandcastles Grain by Grain: Self-Assembled Sand TowersSamuel H. CaballeroAinda não há avaliações
- 0805 1791Documento10 páginas0805 1791Samuel H. CaballeroAinda não há avaliações
- Serial Office 2013Documento1 páginaSerial Office 2013Gii-AllFredCrzAinda não há avaliações
- Scan Carters 2013Documento1 páginaScan Carters 2013Samuel H. CaballeroAinda não há avaliações
- Principles of CHN New UpdatedDocumento4 páginasPrinciples of CHN New Updatediheart musicAinda não há avaliações
- ZJJ 3Documento23 páginasZJJ 3jananiwimukthiAinda não há avaliações
- Johnson 1999Documento20 páginasJohnson 1999Linh Hoàng PhươngAinda não há avaliações
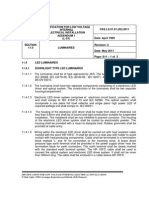
- JKR Specs L-S1 Addendum No 1 LED Luminaires - May 2011Documento3 páginasJKR Specs L-S1 Addendum No 1 LED Luminaires - May 2011Leong KmAinda não há avaliações
- 2022 - J - Chir - Nastase Managementul Neoplaziilor Pancreatice PapilareDocumento8 páginas2022 - J - Chir - Nastase Managementul Neoplaziilor Pancreatice PapilarecorinaAinda não há avaliações
- Predictive Analytics: QM901.1x Prof U Dinesh Kumar, IIMBDocumento36 páginasPredictive Analytics: QM901.1x Prof U Dinesh Kumar, IIMBVenkata Nelluri PmpAinda não há avaliações
- SBFP Timeline 2019Documento1 páginaSBFP Timeline 2019Marlon Berjolano Ere-erAinda não há avaliações
- Safety Data Sheet for Instant AdhesiveDocumento6 páginasSafety Data Sheet for Instant AdhesiveDiego S. FreitasAinda não há avaliações
- Chicago TemplateDocumento4 páginasChicago TemplateJt MetcalfAinda não há avaliações
- Komposit UHMWPE Sebagai Alternatif Bantalan Rel Kereta Api: Abel Evan, Alia Kristika, Farid Mulia LatiefDocumento11 páginasKomposit UHMWPE Sebagai Alternatif Bantalan Rel Kereta Api: Abel Evan, Alia Kristika, Farid Mulia LatiefAlia KristikaAinda não há avaliações
- Polymer Science: Thermal Transitions in PolymersDocumento20 páginasPolymer Science: Thermal Transitions in Polymerstanveer054Ainda não há avaliações
- Asian Games African Games: Beach VolleyballDocumento5 páginasAsian Games African Games: Beach VolleyballJessan Ybañez JoreAinda não há avaliações
- Monetary System 1Documento6 páginasMonetary System 1priyankabgAinda não há avaliações
- Human Resource Management (MGT 4320) : Kulliyyah of Economics and Management SciencesDocumento9 páginasHuman Resource Management (MGT 4320) : Kulliyyah of Economics and Management SciencesAbuzafar AbdullahAinda não há avaliações
- PMMC ExperimentDocumento2 páginasPMMC ExperimentShyam ShankarAinda não há avaliações
- Explore Spanish Lesson Plan - AnimalsDocumento8 páginasExplore Spanish Lesson Plan - Animalsapi-257582917Ainda não há avaliações
- Physics MCQ Solid State PhysicsDocumento15 páginasPhysics MCQ Solid State PhysicsRams Chander88% (25)
- Ips 350:400:450:500:600 07:05 PDFDocumento124 páginasIps 350:400:450:500:600 07:05 PDFRandall PettersonAinda não há avaliações
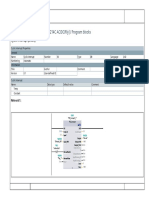
- Escalado / PLC - 1 (CPU 1214C AC/DC/Rly) / Program BlocksDocumento2 páginasEscalado / PLC - 1 (CPU 1214C AC/DC/Rly) / Program BlocksSegundo Angel Vasquez HuamanAinda não há avaliações
- Gabriel Nobre de Souza - Groningen Mini-MetropolisDocumento9 páginasGabriel Nobre de Souza - Groningen Mini-MetropolisGabrielNobredeSouzaAinda não há avaliações
- Resume Android Developer Format1Documento3 páginasResume Android Developer Format1Shah MizanAinda não há avaliações
- OJT Form 03 Performance EvaluationDocumento2 páginasOJT Form 03 Performance EvaluationResshille Ann T. SalleyAinda não há avaliações
- Informed Consent: Ghaiath M. A. HusseinDocumento26 páginasInformed Consent: Ghaiath M. A. HusseinDocAxi Maximo Jr AxibalAinda não há avaliações
- Case Briefing and Case SynthesisDocumento3 páginasCase Briefing and Case SynthesisKai RaguindinAinda não há avaliações
- Sukkur IBA University Aptitude Test Candidates ListDocumento306 páginasSukkur IBA University Aptitude Test Candidates ListFurkan memonAinda não há avaliações
- Literature Review Marketing StrategyDocumento4 páginasLiterature Review Marketing Strategyc5td1cmc100% (1)
- Ragavendhar Seeks Entry Software JobDocumento2 páginasRagavendhar Seeks Entry Software JobfferferfAinda não há avaliações
- Event ReportDocumento2 páginasEvent Reportakshitdaharwal997Ainda não há avaliações
- Fancy YarnsDocumento7 páginasFancy Yarnsiriarn100% (1)
- Transistor Amplifier Operating ParametersDocumento21 páginasTransistor Amplifier Operating ParametersReddyvari VenugopalAinda não há avaliações