Você também pode gostar
- McqsDocumento14 páginasMcqsAbdul RehmanAinda não há avaliações
- Types of Operating Systems Explained in DetailDocumento10 páginasTypes of Operating Systems Explained in DetailMansi GuptaAinda não há avaliações
- CN Hand Written NotesDocumento180 páginasCN Hand Written NotesvijaykannamallaAinda não há avaliações
- Operating System Complete NoteDocumento135 páginasOperating System Complete NoteEfrain Sanjay AdhikaryAinda não há avaliações
- Types of Operating Systems: Batch, Time-Sharing, Distributed & MoreDocumento28 páginasTypes of Operating Systems: Batch, Time-Sharing, Distributed & MorekosgeiAinda não há avaliações
- Module 2 TEACHINGICTEXPLORATORYDocumento20 páginasModule 2 TEACHINGICTEXPLORATORYangelAinda não há avaliações
- OPERATING SYSTEM - INTRODUCTIONDocumento26 páginasOPERATING SYSTEM - INTRODUCTIONOK BYEAinda não há avaliações
- Operating System TypesDocumento9 páginasOperating System TypesTarun GautamAinda não há avaliações
- What Is Operating System? Discuss Role/functions of OS As A ResourceDocumento46 páginasWhat Is Operating System? Discuss Role/functions of OS As A ResourceAvinashAinda não há avaliações
- Operating System NotionDocumento41 páginasOperating System NotionRitikkk ParmarAinda não há avaliações
- Types of Operating System3Documento6 páginasTypes of Operating System3gsssbheemsanaAinda não há avaliações
- Module 1 - 1.5. Operating Systems IntroductionDocumento15 páginasModule 1 - 1.5. Operating Systems IntroductionPATAN ASIF KHAN STUDENT - MECHAinda não há avaliações
- Operating System ExplainedDocumento12 páginasOperating System Explainedking kholiAinda não há avaliações
- OSY - 91 ClubDocumento25 páginasOSY - 91 ClubjigarmahavarAinda não há avaliações
- Os Chapter -1Documento29 páginasOs Chapter -1zerihun nanaAinda não há avaliações
- Unit-I OS Notes (Updated)Documento21 páginasUnit-I OS Notes (Updated)rakhul2005Ainda não há avaliações
- What Is Operating System?: An Operating System (OS) Is That Manages and Resources and Provides Common ForDocumento14 páginasWhat Is Operating System?: An Operating System (OS) Is That Manages and Resources and Provides Common ForOmkar Walanj100% (1)
- OSY - Chapter1Documento11 páginasOSY - Chapter1Rupesh BavgeAinda não há avaliações
- III BCA B OS Unit IDocumento12 páginasIII BCA B OS Unit ITesting Fun100% (1)
- OS 1 Process ManagementDocumento7 páginasOS 1 Process ManagementRitesh KumarAinda não há avaliações
- Module 1 Ect426 Rtos PDFDocumento13 páginasModule 1 Ect426 Rtos PDFBinroy TB100% (2)
- Osunit 1Documento40 páginasOsunit 1BHARATHI TAinda não há avaliações
- Types of Operting SystemDocumento3 páginasTypes of Operting SystemRedietAinda não há avaliações
- Operating SystemDocumento9 páginasOperating SystemAnujAinda não há avaliações
- OSA NotesDocumento23 páginasOSA NotesSANMATIAinda não há avaliações
- Types of Operating SystemsDocumento10 páginasTypes of Operating SystemsjimuelmacamaAinda não há avaliações
- MIT-101-Acitvity 1-Operating System and NetworkingDocumento5 páginasMIT-101-Acitvity 1-Operating System and NetworkingCarlo Moon CorpuzAinda não há avaliações
- OS PPT IntroductionDocumento43 páginasOS PPT IntroductionKukum ChouhanAinda não há avaliações
- OS Unit 1 & 2 NotesDocumento27 páginasOS Unit 1 & 2 NotesSankalpAinda não há avaliações
- Studies and Research, Pune: Symbiosis Institute of ComputerDocumento26 páginasStudies and Research, Pune: Symbiosis Institute of ComputerDhan CAinda não há avaliações
- Chapter 1 Introduction OSDocumento18 páginasChapter 1 Introduction OSKuldeepAinda não há avaliações
- Osy ADocumento24 páginasOsy Aaeromatic234Ainda não há avaliações
- Operating SystemDocumento11 páginasOperating SystemDamber ThapaAinda não há avaliações
- Types of Operating SystemsDocumento12 páginasTypes of Operating SystemsRaja AnsAinda não há avaliações
- Introduction and operating system structure syllabusDocumento29 páginasIntroduction and operating system structure syllabusRadhika BadbadeAinda não há avaliações
- Memory Management: TUTORIALS POINT Simply Easy LearningDocumento10 páginasMemory Management: TUTORIALS POINT Simply Easy LearningSuresh BabuAinda não há avaliações
- Operating System Lecture One: DR Jamal AltuwaijariDocumento24 páginasOperating System Lecture One: DR Jamal AltuwaijariHayder MuthanaAinda não há avaliações
- OSY 22516chapter1Documento12 páginasOSY 22516chapter12008 AvadhutAinda não há avaliações
- VivaDocumento40 páginasVivaShruthi JalalpuramAinda não há avaliações
- Os NotesDocumento67 páginasOs NotesHow To ?Ainda não há avaliações
- Types of Operating SystemsDocumento4 páginasTypes of Operating Systemsamna sadiqAinda não há avaliações
- Evolution of Operating Systems from Batch to DistributedDocumento3 páginasEvolution of Operating Systems from Batch to DistributedRajeswaranaidu DarsiAinda não há avaliações
- Os, Meaning and Types of OsDocumento5 páginasOs, Meaning and Types of OsBoobalan RAinda não há avaliações
- Operating SystemDocumento12 páginasOperating SystemVaibhav BansalAinda não há avaliações
- Introduction of Operating SystemDocumento8 páginasIntroduction of Operating SystemvikkigrgAinda não há avaliações
- Operating Systems Lecture No. 2: Reading MaterialDocumento6 páginasOperating Systems Lecture No. 2: Reading MaterialImMalikAinda não há avaliações
- OS Project 1Documento16 páginasOS Project 1NarayanaMunnaAinda não há avaliações
- 1 Introduction To OS NotesDocumento5 páginas1 Introduction To OS NotesCarlo GatonAinda não há avaliações
- OperatingsystemDocumento18 páginasOperatingsystemAdnanAinda não há avaliações
- Unit 1Documento28 páginasUnit 1Daksh RajAinda não há avaliações
- Operating Systems Interview QuestionsDocumento15 páginasOperating Systems Interview QuestionsSudarshan BAinda não há avaliações
- Operating System Unit 1Documento29 páginasOperating System Unit 1HECHOS TALKAinda não há avaliações
- OS Interface Hardware SoftwareDocumento10 páginasOS Interface Hardware SoftwareRajeswaranaidu DarsiAinda não há avaliações
- Operating SystemDocumento132 páginasOperating SystemIndumathy ParanthamanAinda não há avaliações
- Operating SystemDocumento48 páginasOperating SystemSalie Dia CanamAinda não há avaliações
- Mca 105 Assignment No 1Documento8 páginasMca 105 Assignment No 1Rajesh SharmaAinda não há avaliações
- OS Functions Memory Management Processor Allocation File SharingDocumento139 páginasOS Functions Memory Management Processor Allocation File SharingAavyaan SahuAinda não há avaliações
- Acf PPT 1Documento8 páginasAcf PPT 1Shaival PimplikarAinda não há avaliações
- Mohammad Adnan (Os)Documento18 páginasMohammad Adnan (Os)AdnanAinda não há avaliações
- CH-1-OPERATING SYSTEMDocumento5 páginasCH-1-OPERATING SYSTEMJyoti PatelAinda não há avaliações
- Mye-Bank Report2Documento47 páginasMye-Bank Report2ReshmaAinda não há avaliações
- Project GuidelineDocumento2 páginasProject GuidelineReshmaAinda não há avaliações
- Shce Du LingDocumento4 páginasShce Du LingReshmaAinda não há avaliações
- Meaning of Operating System: Using Software and Physical PartsDocumento22 páginasMeaning of Operating System: Using Software and Physical PartsReshmaAinda não há avaliações
- AWS DevOps Interview QuestionAnswerDocumento10 páginasAWS DevOps Interview QuestionAnswerRadheshyam Nayak100% (1)
- Evolution of Computers Questions & Answers - WittyChimpDocumento5 páginasEvolution of Computers Questions & Answers - WittyChimpkiddiescript32Ainda não há avaliações
- eRAN18.1 05Documento119 páginaseRAN18.1 05nrsthaAinda não há avaliações
- Panasonic Th-32a402l PDFDocumento30 páginasPanasonic Th-32a402l PDFzidi elektronikAinda não há avaliações
- Computer Engineering I (ECE290) : Digital System Design With VerilogDocumento136 páginasComputer Engineering I (ECE290) : Digital System Design With VerilogTrần MạnhAinda não há avaliações
- Data Acquisition: Fig 2.1:-Parts of Measurement SystemDocumento16 páginasData Acquisition: Fig 2.1:-Parts of Measurement SystemHayder AliAinda não há avaliações
- On Wide Area Network Optimization: IEEE Communications Surveys & Tutorials January 2012Documento26 páginasOn Wide Area Network Optimization: IEEE Communications Surveys & Tutorials January 2012somaliyow17Ainda não há avaliações
- Digital Input Module SM 321 DI 16 X DC 24 V High Speed (6ES7321-1BH10-0AA0)Documento3 páginasDigital Input Module SM 321 DI 16 X DC 24 V High Speed (6ES7321-1BH10-0AA0)Fabio CavalheiroAinda não há avaliações
- Midterm Problem SetDocumento3 páginasMidterm Problem SetVia Marie MesaAinda não há avaliações
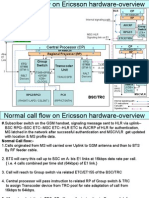
- Normal Call Flow On Ericsson AXE Hardware OverviewDocumento3 páginasNormal Call Flow On Ericsson AXE Hardware OverviewSonu Tripathi100% (2)
- Firmware Engineer Roadmap 2021 1632678252Documento1 páginaFirmware Engineer Roadmap 2021 1632678252Joao DuqueAinda não há avaliações
- Multi-Output, Low-Noise Power-Supply Controllers For Notebook ComputersDocumento28 páginasMulti-Output, Low-Noise Power-Supply Controllers For Notebook ComputersAleksAinda não há avaliações
- Di Audio Datasheet X Npmien54 En1 2Documento2 páginasDi Audio Datasheet X Npmien54 En1 2Bryan BayacaAinda não há avaliações
- Synchronous Lecture Notes Week 3Documento21 páginasSynchronous Lecture Notes Week 3Zulfiqar AliAinda não há avaliações
- Homework 2 SolutionsDocumento10 páginasHomework 2 SolutionsJosh at nightAinda não há avaliações
- Volte Architecture: Abdulsalam Maher Cellqual CompanyDocumento22 páginasVolte Architecture: Abdulsalam Maher Cellqual CompanyAbdulsalam MaherAinda não há avaliações
- Unit-3 Satellite Link DesignDocumento4 páginasUnit-3 Satellite Link DesignShanmugam SivaAinda não há avaliações
- Arduino Waveform Generator: Step 1: Technical ConsiderationsDocumento11 páginasArduino Waveform Generator: Step 1: Technical ConsiderationsdheenadayalanAinda não há avaliações
- Types of Delays that Impact ASIC DesignDocumento17 páginasTypes of Delays that Impact ASIC DesignJayanth bemesettyAinda não há avaliações
- 02 Msoftx3000 Hardware System Issue1 0Documento68 páginas02 Msoftx3000 Hardware System Issue1 0Mohammed ShakilAinda não há avaliações
- Multi Stage Amplifiers: E.Susmitha Asst - Professor, Dept of ECE KITS, WarangalDocumento27 páginasMulti Stage Amplifiers: E.Susmitha Asst - Professor, Dept of ECE KITS, WarangalRUSHIRAJ DASUAinda não há avaliações
- Shenzhen General Measure Technology Co., LTD.: Weighing Controller SpecificationDocumento4 páginasShenzhen General Measure Technology Co., LTD.: Weighing Controller Specificationsir867413140Ainda não há avaliações
- Presentacion Serie X DahuaDocumento40 páginasPresentacion Serie X DahuaDaniel Flores SánchezAinda não há avaliações
- Relay G30 ManualDocumento42 páginasRelay G30 ManualLeon KhiuAinda não há avaliações
- 5G Technology: A Seminar Report on the Evolution from 1G to 5GDocumento30 páginas5G Technology: A Seminar Report on the Evolution from 1G to 5GYugvi PaliwalAinda não há avaliações
- Schmitt TriggerDocumento18 páginasSchmitt TriggerSusmita AdhikaryAinda não há avaliações
- Configure OSPF MD5 AuthenticationDocumento2 páginasConfigure OSPF MD5 AuthenticationJUAN MAURICIO QUEZADA JAMASMIEAinda não há avaliações
- JVC kd-dv5000 SM 3 (ET)Documento65 páginasJVC kd-dv5000 SM 3 (ET)Csaba KisAinda não há avaliações
- Iq LINK FeaturesDocumento7 páginasIq LINK Featuresadrian1969Ainda não há avaliações
- Direction Based Routing Strategy To Reduce Broadcast Storm in MANETDocumento6 páginasDirection Based Routing Strategy To Reduce Broadcast Storm in MANETNagaraj LutimathAinda não há avaliações