Você também pode gostar
- Swarm Intelligence for Resource Management in Internet of ThingsNo EverandSwarm Intelligence for Resource Management in Internet of ThingsAinda não há avaliações
- Environmental SustainabilityDocumento3 páginasEnvironmental SustainabilityJoseph Michael Perez100% (1)
- Vmware Validated Design 41 SDDC Architecture DesignDocumento226 páginasVmware Validated Design 41 SDDC Architecture DesignmpuriceAinda não há avaliações
- Batch 3 JKVDocumento15 páginasBatch 3 JKVSatya Moulika GokavarapuAinda não há avaliações
- School Van Tracking Using SMS: AbstractDocumento5 páginasSchool Van Tracking Using SMS: AbstractIJSREDAinda não há avaliações
- Rfid Imparted Student Monitoring SystemDocumento4 páginasRfid Imparted Student Monitoring SystemexcitekarthikAinda não há avaliações
- Bus Safety System For School Children by Using Rfid and GSM ModemDocumento5 páginasBus Safety System For School Children by Using Rfid and GSM Modemmukesh poundekarAinda não há avaliações
- BIS - RFID - School Children - F PDFDocumento12 páginasBIS - RFID - School Children - F PDF27051995Ainda não há avaliações
- A Self-Configurable New Generation School Children Tracking SystemDocumento18 páginasA Self-Configurable New Generation School Children Tracking SystemmathstopperAinda não há avaliações
- Child Tracking Device: Dhanalakshmi. M Hemamalini. SDocumento4 páginasChild Tracking Device: Dhanalakshmi. M Hemamalini. SPooja BanAinda não há avaliações
- Child Tracking System Using GPS: Sindhuja H R, Swathi R Upadhya, Vrundha S, Tushar SoniDocumento5 páginasChild Tracking System Using GPS: Sindhuja H R, Swathi R Upadhya, Vrundha S, Tushar SoniArnav GudduAinda não há avaliações
- Rfid - Rovisp 2021Documento6 páginasRfid - Rovisp 2021AmalinaAbdullahAinda não há avaliações
- IoT Based Smart School Bus Monitoring and Notification SystemDocumento4 páginasIoT Based Smart School Bus Monitoring and Notification SystemNagababu KunchamAinda não há avaliações
- Children Activity Alert System Using Accelerometer and GSM TechnologyDocumento4 páginasChildren Activity Alert System Using Accelerometer and GSM TechnologyEditor IJRITCC100% (1)
- Two Way Authentication System For Exam Paper Leakage Detection A ReviewDocumento7 páginasTwo Way Authentication System For Exam Paper Leakage Detection A ReviewIJRASETPublicationsAinda não há avaliações
- RFID-Based System For School Children Transportation Safety Enhancement With Attendance SystemDocumento4 páginasRFID-Based System For School Children Transportation Safety Enhancement With Attendance SystemAnonymous kw8Yrp0R5r100% (2)
- A Survey On RFID Based School Bus Monitoring and Attendance SystemDocumento6 páginasA Survey On RFID Based School Bus Monitoring and Attendance SystemMOBIN SYEDAinda não há avaliações
- Child Safety Wearble DeviceDocumento6 páginasChild Safety Wearble DeviceKorrapati Nagaraju Sri RamakrishnaAinda não há avaliações
- Harshda (SMS Mastar Format)Documento25 páginasHarshda (SMS Mastar Format)SHIRBHATE MULTI SERVICESAinda não há avaliações
- Anytime Anyplace-Remote Monitoring of Students Attendance Based On Rfid and GSM NetworkDocumento4 páginasAnytime Anyplace-Remote Monitoring of Students Attendance Based On Rfid and GSM NetworkAllyson WattsAinda não há avaliações
- Child PDFDocumento4 páginasChild PDFsoumya rajAinda não há avaliações
- Child Tracking System Using GPSDocumento4 páginasChild Tracking System Using GPSGRD JournalsAinda não há avaliações
- SMS Based Kids Tracking and Safety System by Using RFID and GSMDocumento7 páginasSMS Based Kids Tracking and Safety System by Using RFID and GSMNag RajuAinda não há avaliações
- The Design of Intelligent Campus Security & Attendance System Based On RFID, GSM and Zig-BeeDocumento7 páginasThe Design of Intelligent Campus Security & Attendance System Based On RFID, GSM and Zig-BeeMeerYousufAliAinda não há avaliações
- 32.electronic Protection For Exam Paper LeakageDocumento3 páginas32.electronic Protection For Exam Paper LeakageIt's MeAinda não há avaliações
- IOT Based Accident Alert and Vehicle Tracking Using GPS and GSM ModuleDocumento5 páginasIOT Based Accident Alert and Vehicle Tracking Using GPS and GSM ModuleIJARSCT JournalAinda não há avaliações
- Journal Batch 4Documento5 páginasJournal Batch 4Tamil SelvanAinda não há avaliações
- IOT Based School Children Transportation Safety SystemDocumento3 páginasIOT Based School Children Transportation Safety Systemkadudula pranavi kumariAinda não há avaliações
- Technical Review On Implementation of GSM Integrated Digital Token Counter SystemDocumento4 páginasTechnical Review On Implementation of GSM Integrated Digital Token Counter SystemIOSRjournalAinda não há avaliações
- 1 s2.0 S2665917423000570 MainDocumento8 páginas1 s2.0 S2665917423000570 MainnazalnavazAinda não há avaliações
- Mitali Child SafetyDocumento23 páginasMitali Child SafetyVishal LabdeAinda não há avaliações
- Smart Wearable DeviceDocumento6 páginasSmart Wearable DeviceSandhiya RavichandranAinda não há avaliações
- Iot Based Class Attendance Monitoring System Using Rfid and GSMDocumento5 páginasIot Based Class Attendance Monitoring System Using Rfid and GSMbalakrishnak eceAinda não há avaliações
- Synopsis Border SecurityDocumento5 páginasSynopsis Border SecurityPrakruthi NagarajAinda não há avaliações
- Conf - Accident Detection and Alerting Systems A StudyDocumento6 páginasConf - Accident Detection and Alerting Systems A StudyAbdulkadir Shehu bariAinda não há avaliações
- Basepaper 8Documento9 páginasBasepaper 8Nagesh vAinda não há avaliações
- IoT Based School Bus Monitoring SystemDocumento9 páginasIoT Based School Bus Monitoring SystemIJRASETPublicationsAinda não há avaliações
- Problem StatementDocumento20 páginasProblem StatementAnam KhanAinda não há avaliações
- Problem StatementDocumento11 páginasProblem StatementAnam Khan0% (1)
- Automatic Control On Railway Gates Using IotDocumento3 páginasAutomatic Control On Railway Gates Using IotPrateek KumarAinda não há avaliações
- Smart Electronic System For Women Safety: IjireeiceDocumento2 páginasSmart Electronic System For Women Safety: IjireeiceChaitrashreeAinda não há avaliações
- Volume 10, No. 2 Volume 10, No. 2, March-April 2019: Research PaperDocumento8 páginasVolume 10, No. 2 Volume 10, No. 2, March-April 2019: Research PaperPrince MagnusAinda não há avaliações
- GPS Based Real Time Vehicle Tracking System For Kid's Safety Using RFID and GSMDocumento3 páginasGPS Based Real Time Vehicle Tracking System For Kid's Safety Using RFID and GSMPavan VAinda não há avaliações
- Real Time Gps and GSM Based Automatic Ambulance Rescue System With IotDocumento5 páginasReal Time Gps and GSM Based Automatic Ambulance Rescue System With Iothamed razaAinda não há avaliações
- JornalNX - Bus Information SystemDocumento3 páginasJornalNX - Bus Information SystemJournalNX - a Multidisciplinary Peer Reviewed JournalAinda não há avaliações
- RFID Based Secure Smart School Bus SystemDocumento8 páginasRFID Based Secure Smart School Bus SystemAlfi MaulanaAinda não há avaliações
- Smart WheelchairDocumento9 páginasSmart WheelchairAnindya SarkarAinda não há avaliações
- A Self-Configurable New Generation Children Tracking SystemDocumento4 páginasA Self-Configurable New Generation Children Tracking SystemNithiya RamuAinda não há avaliações
- R T V C T GSM GPS T: EAL IME Ehicle Easing and Racking Using AND EchnologyDocumento6 páginasR T V C T GSM GPS T: EAL IME Ehicle Easing and Racking Using AND EchnologyNelarapuMaheshAinda não há avaliações
- Wireless Black Box Using MEMS AcceleromeDocumento7 páginasWireless Black Box Using MEMS Acceleromelavanya LAinda não há avaliações
- Student Database Management and Enquiry System Using Barcode Scanner 1403Documento13 páginasStudent Database Management and Enquiry System Using Barcode Scanner 1403shalini singhAinda não há avaliações
- Pocket Finder System Based On Android Mobile Terminal: S.R.Ghadge, Prof.P.B.Ghewari AMGOI, Vathar, IndiaDocumento4 páginasPocket Finder System Based On Android Mobile Terminal: S.R.Ghadge, Prof.P.B.Ghewari AMGOI, Vathar, IndiaJournalNX - a Multidisciplinary Peer Reviewed JournalAinda não há avaliações
- Al-Lawati2015 TA RFID PDFDocumento6 páginasAl-Lawati2015 TA RFID PDFIlhamHidayatAinda não há avaliações
- IOT Base Tracking Device For Kid's SafetyDocumento6 páginasIOT Base Tracking Device For Kid's SafetyshivanisehrawatAinda não há avaliações
- Smart Accident Notification System UsingDocumento4 páginasSmart Accident Notification System UsingInternational Journal of Innovative Science and Research TechnologyAinda não há avaliações
- Demonetization and Improving Security in Money Transactions Using Smart Cards and GSM TechnologiesDocumento8 páginasDemonetization and Improving Security in Money Transactions Using Smart Cards and GSM TechnologiesTJPRC PublicationsAinda não há avaliações
- V5i4 Pices0014Documento2 páginasV5i4 Pices0014joel mshanaAinda não há avaliações
- An Intelligent Data-Driven Model To Secure Intra - Vehicle Communications Based On Machine LearningDocumento8 páginasAn Intelligent Data-Driven Model To Secure Intra - Vehicle Communications Based On Machine LearningIJRASETPublicationsAinda não há avaliações
- Wa0014Documento22 páginasWa0014md.waheeduddin27Ainda não há avaliações
- Application of Smart Bag Using ArduinoDocumento5 páginasApplication of Smart Bag Using ArduinoIJRASETPublicationsAinda não há avaliações
- Fingerprint Based Student Attendance System Using GSM: Related PapersDocumento5 páginasFingerprint Based Student Attendance System Using GSM: Related PapersAnagha SAinda não há avaliações
- JournalNX - Smart Public TransportDocumento3 páginasJournalNX - Smart Public TransportJournalNX - a Multidisciplinary Peer Reviewed JournalAinda não há avaliações
- Lodha GroupDocumento9 páginasLodha Groupvivek ghatbandheAinda não há avaliações
- Mms-Ente-Case StudyDocumento2 páginasMms-Ente-Case Studyvivek ghatbandheAinda não há avaliações
- Deepak QuestionsDocumento5 páginasDeepak Questionsvivek ghatbandheAinda não há avaliações
- Intrinsic Factors: The Factors Relating To The Essential Nature of A Thing InherentDocumento5 páginasIntrinsic Factors: The Factors Relating To The Essential Nature of A Thing Inherentvivek ghatbandheAinda não há avaliações
- Case Study-: KCC and Social EntrepreneurshipDocumento1 páginaCase Study-: KCC and Social Entrepreneurshipvivek ghatbandhe50% (2)
- Constraints Facing by The Women Entrepreneurs Are: I. IIDocumento4 páginasConstraints Facing by The Women Entrepreneurs Are: I. IIvivek ghatbandheAinda não há avaliações
- Micromanufacturing: Bulk Micromanufacturing Surface Micromachining The LIGA ProcessDocumento25 páginasMicromanufacturing: Bulk Micromanufacturing Surface Micromachining The LIGA Processvivek ghatbandheAinda não há avaliações
- 2 PDFDocumento6 páginas2 PDFvivek ghatbandheAinda não há avaliações
- Microsystem Technology and Microrobotics: Printed BookDocumento1 páginaMicrosystem Technology and Microrobotics: Printed Bookvivek ghatbandheAinda não há avaliações
- AGC IPC Slash Sheet ReferenceDocumento4 páginasAGC IPC Slash Sheet ReferenceSelvakumar NatarajanAinda não há avaliações
- Committee Report PDFDocumento72 páginasCommittee Report PDFVivek BadkurAinda não há avaliações
- 119 SQL Code Smells PDFDocumento69 páginas119 SQL Code Smells PDFdivemustgoAinda não há avaliações
- Desktop 10 QA Exam Prep Guide PDFDocumento16 páginasDesktop 10 QA Exam Prep Guide PDFShiva RungtaAinda não há avaliações
- Vibration Isolaton SelectionDocumento24 páginasVibration Isolaton SelectionvelmuruganAinda não há avaliações
- BSNL CRM FTTH User Manual - Release1.0 - ShiftDocumento25 páginasBSNL CRM FTTH User Manual - Release1.0 - ShiftJTONIB AIZAWLAinda não há avaliações
- Position PaperDocumento7 páginasPosition PaperClem CollantesAinda não há avaliações
- Ds Lm5006 en Co 79839 Float Level SwitchDocumento7 páginasDs Lm5006 en Co 79839 Float Level SwitchRiski AdiAinda não há avaliações
- How To Effectively Implement DCIM and Bridge The Gap Between IT and FacilitiesDocumento11 páginasHow To Effectively Implement DCIM and Bridge The Gap Between IT and FacilitiesAbednego TariganAinda não há avaliações
- Lecture02 WindLoadingDocumento53 páginasLecture02 WindLoadingMongkol JirawacharadetAinda não há avaliações
- S7-1200 DataSheetDocumento14 páginasS7-1200 DataSheetperuhayaAinda não há avaliações
- Ijmemr V3i1 009Documento5 páginasIjmemr V3i1 009Sandesh SanAinda não há avaliações
- Usability Engineering (Human Computer Intreraction)Documento31 páginasUsability Engineering (Human Computer Intreraction)Muhammad Usama NadeemAinda não há avaliações
- Antony Kungu - Final Project AssignmentDocumento11 páginasAntony Kungu - Final Project Assignmentapi-420816837Ainda não há avaliações
- Apollo Lighting Products Catalog 2011Documento68 páginasApollo Lighting Products Catalog 2011Today's NameAinda não há avaliações
- Facility Layout Case StudyDocumento8 páginasFacility Layout Case StudyHitesh SinglaAinda não há avaliações
- CeldekDocumento2 páginasCeldekPK SinghAinda não há avaliações
- Culminating Activity: (A Proposal)Documento3 páginasCulminating Activity: (A Proposal)Landice Myoui100% (1)
- 2SK2188Documento2 páginas2SK2188Abigail HoobsAinda não há avaliações
- CATALO VetivDocumento240 páginasCATALO VetivHữu CôngAinda não há avaliações
- Multiquadrant Dynamics in The Speed-Torque PlaneDocumento41 páginasMultiquadrant Dynamics in The Speed-Torque PlanethanvandhAinda não há avaliações
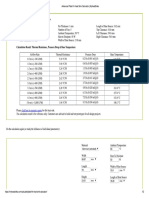
- Advanced Plate Fin Heat Sink Calculator - MyHeatSinksDocumento2 páginasAdvanced Plate Fin Heat Sink Calculator - MyHeatSinksHarsh BhardwajAinda não há avaliações
- TEJASWINIDocumento4 páginasTEJASWINIShìVâ KùMàrAinda não há avaliações
- UD05674B Baseline Access Control Terminal DS-KIT802 User Manual V2.0 20180228Documento121 páginasUD05674B Baseline Access Control Terminal DS-KIT802 User Manual V2.0 20180228iresh jayasingheAinda não há avaliações
- Riviera Sponsorship LetterDocumento7 páginasRiviera Sponsorship LetterAnirudh Reddy YalalaAinda não há avaliações
- Buku Panduan P2K2 FINALDocumento44 páginasBuku Panduan P2K2 FINALHandayani lestariAinda não há avaliações
- A Handbook of Livestock and Poultry Best Management PracticeDocumento87 páginasA Handbook of Livestock and Poultry Best Management PracticeRaymond Katabazi100% (2)
- Is Iec 60534 2 1 1998Documento48 páginasIs Iec 60534 2 1 1998Sreeram PanigrahiAinda não há avaliações