Você também pode gostar
- OdeDocumento10 páginasOde林格屹Ainda não há avaliações
- Simple Harmonic Motion-WikipediaDocumento21 páginasSimple Harmonic Motion-WikipediaSiva PradyumnaAinda não há avaliações
- Chapter 1Documento116 páginasChapter 1muhammad azwan zul-kifleyAinda não há avaliações
- Harmonic OscillatorDocumento8 páginasHarmonic Oscillator1158062070Ainda não há avaliações
- DOM M S D F Harmonical Excited Vibration 1Documento90 páginasDOM M S D F Harmonical Excited Vibration 1Prajapati DhavalAinda não há avaliações
- Harmonic OscillatorDocumento3 páginasHarmonic OscillatorHoorish NiaziAinda não há avaliações
- VA&C - UNIT - II (Part-Two)Documento107 páginasVA&C - UNIT - II (Part-Two)Dame AyaneAinda não há avaliações
- Forced Vibration of Single Degree of FreedomDocumento90 páginasForced Vibration of Single Degree of FreedomSamuel WozabAinda não há avaliações
- Resonance: Resonance Describes The Phenomenon of Increased Amplitude That Occurs WhenDocumento10 páginasResonance: Resonance Describes The Phenomenon of Increased Amplitude That Occurs WhenLijukrishnanAinda não há avaliações
- Mechanical Vibration Lab: Faculty of Engineering Mechanical Engineering DepartmentDocumento64 páginasMechanical Vibration Lab: Faculty of Engineering Mechanical Engineering DepartmentMuhammad Haris KhanAinda não há avaliações
- DamperDocumento4 páginasDampertamasinekAinda não há avaliações
- Oscillations: 1) What Do You Mean by SHM?Documento3 páginasOscillations: 1) What Do You Mean by SHM?bgmiytAinda não há avaliações
- RLC CircuitDocumento4 páginasRLC CircuitNicoleta PotîrnicheAinda não há avaliações
- Chapter 1 - Introduction To Mechanical Vibrations PDFDocumento13 páginasChapter 1 - Introduction To Mechanical Vibrations PDFLuchito CtAinda não há avaliações
- 301 CHP7Documento27 páginas301 CHP7aleenhaidarAinda não há avaliações
- Resonance and Analysis of Barton's Pendulum PDFDocumento17 páginasResonance and Analysis of Barton's Pendulum PDFmailbox_afeef2Ainda não há avaliações
- Notes - Topic 13 Oscillations - CAIE Physics A-LevelDocumento6 páginasNotes - Topic 13 Oscillations - CAIE Physics A-LevelKen OtooAinda não há avaliações
- WavesDocumento3 páginasWavesria sAinda não há avaliações
- Mech Engg - GovernorsDocumento6 páginasMech Engg - GovernorsRajesh PandaAinda não há avaliações
- Elastisitas Hukum Hooke: Free Vibration Without DampingDocumento13 páginasElastisitas Hukum Hooke: Free Vibration Without DampingIntanSarahitaNAinda não há avaliações
- Damping FantasticDocumento20 páginasDamping FantastickapolaAinda não há avaliações
- Physics Mid-Sem CompilationDocumento220 páginasPhysics Mid-Sem Compilationdhruv goraiAinda não há avaliações
- 1 OscillationWaveDocumento33 páginas1 OscillationWaveanhbdt.stfAinda não há avaliações
- Oscillations NotesDocumento48 páginasOscillations Notesabdulrehman881122Ainda não há avaliações
- Chapter 2-2Documento26 páginasChapter 2-2Ahmed Abdulbary AL-QarmAinda não há avaliações
- Lecture 1Documento25 páginasLecture 1Ali KenesovAinda não há avaliações
- Hysteretic DampingDocumento20 páginasHysteretic DampingShivaprasad.P100% (9)
- 3.2 Forced Harmonic OscillationsDocumento11 páginas3.2 Forced Harmonic OscillationsKseniia KrupchakAinda não há avaliações
- Oscillations A2Documento2 páginasOscillations A2Md Irtiza HafizAinda não há avaliações
- Pptu-5 Oscillation 1Documento19 páginasPptu-5 Oscillation 1Abraham DamtewAinda não há avaliações
- OscillationsDocumento37 páginasOscillationsRicky CementAinda não há avaliações
- Normal Mode PDFDocumento38 páginasNormal Mode PDFBiswajit BhowmickAinda não há avaliações
- Harmonically Excited Vibration: Week 9Documento7 páginasHarmonically Excited Vibration: Week 9Adnan RazaAinda não há avaliações
- Damping Ratio: Classical MechanicsDocumento4 páginasDamping Ratio: Classical Mechanicsletter_ashish4444100% (1)
- What Is The Damping ?Documento20 páginasWhat Is The Damping ?Charan Tej RudralaAinda não há avaliações
- Module 4-Part 1Documento15 páginasModule 4-Part 1Muhammad FahimAinda não há avaliações
- 9016-Lecture 10Documento16 páginas9016-Lecture 10Qeti JanjgavaAinda não há avaliações
- Q2W6 Periodic MotionDocumento78 páginasQ2W6 Periodic Motionhikkiro hikkiAinda não há avaliações
- Chapter 17 Oscillation Definition and Concept ListDocumento2 páginasChapter 17 Oscillation Definition and Concept Listhongyi huangAinda não há avaliações
- 15.7: Forced Oscillations: Learning ObjectivesDocumento4 páginas15.7: Forced Oscillations: Learning ObjectivesSURESH SURAGANIAinda não há avaliações
- OscillationsDocumento7 páginasOscillationshavertz291aAinda não há avaliações
- Chapter 2-3Documento15 páginasChapter 2-3الخليل إبراهيمAinda não há avaliações
- Chapter 3-2Documento14 páginasChapter 3-2Abdalmalek ShamsanAinda não há avaliações
- Response of An Undamped SystemDocumento6 páginasResponse of An Undamped SystemWacko AsahanAinda não há avaliações
- Chapter 13: Vibrations and Waves Simple Harmonic Motion: X A M K VDocumento7 páginasChapter 13: Vibrations and Waves Simple Harmonic Motion: X A M K VJohnBenardAinda não há avaliações
- Physics ch5Documento78 páginasPhysics ch5amanuel amanAinda não há avaliações
- Acoustics Laboratory Guide I (Sessions 1 & 2)Documento9 páginasAcoustics Laboratory Guide I (Sessions 1 & 2)cesarpiquerastAinda não há avaliações
- Chapter 3Documento35 páginasChapter 3alikhalidd23Ainda não há avaliações
- 053 - CE8021, CE6701 Structural Dynamics and Earthquake Engineering - 2 Marks 2Documento116 páginas053 - CE8021, CE6701 Structural Dynamics and Earthquake Engineering - 2 Marks 2Ankit Jose Antony0% (1)
- LC-Oscillations and WavesDocumento7 páginasLC-Oscillations and WavesSam LoveAinda não há avaliações
- Pulsed Fourier Transform NMRDocumento12 páginasPulsed Fourier Transform NMRSalustiano JurandiAinda não há avaliações
- Simple Harmonic Motion - WikipediaDocumento10 páginasSimple Harmonic Motion - WikipediaDuy Khanh NguyễnAinda não há avaliações
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11No EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Ainda não há avaliações
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)No EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)Ainda não há avaliações
- Feynman Lectures Simplified 1B: Harmonic Oscillators, & ThermodynamicsNo EverandFeynman Lectures Simplified 1B: Harmonic Oscillators, & ThermodynamicsAinda não há avaliações
- Intensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleNo EverandIntensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleAinda não há avaliações
- Linus's LawDocumento2 páginasLinus's LawFelixAinda não há avaliações
- Kernel PanicDocumento5 páginasKernel PanicFelixAinda não há avaliações
- Tux (Mascot)Documento7 páginasTux (Mascot)FelixAinda não há avaliações
- Linux Kernel OopsDocumento2 páginasLinux Kernel OopsFelixAinda não há avaliações
- Samba (Software)Documento7 páginasSamba (Software)FelixAinda não há avaliações
- GNU HurdDocumento7 páginasGNU HurdFelixAinda não há avaliações
- Debian GNU KFreeBSDDocumento1 páginaDebian GNU KFreeBSDFelixAinda não há avaliações
- Semiconductor: Properties Materials Physics of SemiconductorsDocumento9 páginasSemiconductor: Properties Materials Physics of SemiconductorsFelixAinda não há avaliações
- Panzerfaust: Panzerfaust's Direct Ancestor Was The Similar, Smaller-WarheadDocumento8 páginasPanzerfaust: Panzerfaust's Direct Ancestor Was The Similar, Smaller-WarheadFelixAinda não há avaliações
- MIT Computer Science and Artificial Intelligence LaboratoryDocumento5 páginasMIT Computer Science and Artificial Intelligence LaboratoryFelixAinda não há avaliações
- Linux Kernel PDFDocumento43 páginasLinux Kernel PDFFelixAinda não há avaliações
- Busy BoxDocumento7 páginasBusy BoxFelixAinda não há avaliações
- Li MuxDocumento6 páginasLi MuxFelixAinda não há avaliações
- The Free Software DefinitionDocumento3 páginasThe Free Software DefinitionFelixAinda não há avaliações
- The Free Software DefinitionDocumento3 páginasThe Free Software DefinitionFelixAinda não há avaliações
- Ram PickupDocumento27 páginasRam PickupFelix50% (4)
- IbmDocumento17 páginasIbmFelixAinda não há avaliações
- AudiDocumento16 páginasAudiFelixAinda não há avaliações
- McLaren F1Documento19 páginasMcLaren F1FelixAinda não há avaliações
- Tiger IDocumento19 páginasTiger IFelixAinda não há avaliações
- Mini Coupé and RoadsterDocumento3 páginasMini Coupé and RoadsterFelixAinda não há avaliações
- JaguarDocumento19 páginasJaguarFelixAinda não há avaliações
- 8.8 CM Flak 18 36 37 41Documento16 páginas8.8 CM Flak 18 36 37 41Felix0% (1)
- I Love The '80s (U.S. TV Series)Documento9 páginasI Love The '80s (U.S. TV Series)FelixAinda não há avaliações
- I Love The '90s (U.S. TV Series)Documento7 páginasI Love The '90s (U.S. TV Series)FelixAinda não há avaliações
- SamsungDocumento27 páginasSamsungFelixAinda não há avaliações
- Jagdpanzer IVDocumento5 páginasJagdpanzer IVFelixAinda não há avaliações
- DaewooDocumento6 páginasDaewooFelixAinda não há avaliações
- LG CorporationDocumento8 páginasLG CorporationFelixAinda não há avaliações
- Puma (Brand)Documento12 páginasPuma (Brand)FelixAinda não há avaliações
- AXD-PVH-AS-MAN-0001-03 - A9 Installation Manual EN-ESDocumento155 páginasAXD-PVH-AS-MAN-0001-03 - A9 Installation Manual EN-ESJuan HidalgoAinda não há avaliações
- Premium Connection Drill PipesDocumento5 páginasPremium Connection Drill PipesAnupam Thakuria /QOGIL/QuippoworldAinda não há avaliações
- Submittal Data SheetDocumento8 páginasSubmittal Data SheetErickAinda não há avaliações
- Fab - Y-Strainers - 2nd EditionDocumento15 páginasFab - Y-Strainers - 2nd EditionRichard V. Quispe CastillonAinda não há avaliações
- Sis 2.0Documento2 páginasSis 2.0ShaneAinda não há avaliações
- Thermoplastic Tubing: Catalogue 5210/UKDocumento15 páginasThermoplastic Tubing: Catalogue 5210/UKGeo BuzatuAinda não há avaliações
- FAST Transmission-7 GearsDocumento28 páginasFAST Transmission-7 Gearseman haghshenasAinda não há avaliações
- Few Words About Stepper Motor Advantages Disadvantages and ClassificationDocumento4 páginasFew Words About Stepper Motor Advantages Disadvantages and ClassificationDeepak Jha KashyapAinda não há avaliações
- TP6551 MobileOperationDocumento48 páginasTP6551 MobileOperationAnonymous M0OEZEKoGiAinda não há avaliações
- Replacement Parts For 3M Pneumatic Cut Off Tool 28407 PartsDocumento2 páginasReplacement Parts For 3M Pneumatic Cut Off Tool 28407 Partsskyler summersAinda não há avaliações
- Service Repair Manual: English All Language: Geographic Region: Serial Number RangeDocumento83 páginasService Repair Manual: English All Language: Geographic Region: Serial Number RangeAnne S. Sokolovska100% (1)
- NSSK Sugar Factory Bidar Intrenship ReportDocumento45 páginasNSSK Sugar Factory Bidar Intrenship Reportmukund100% (1)
- Neumax QT Series Quarter Turn Electric ActuatorDocumento5 páginasNeumax QT Series Quarter Turn Electric Actuatornvhoang0185Ainda não há avaliações
- Biland Sa-250: Technical SpecificationsDocumento4 páginasBiland Sa-250: Technical SpecificationsNofriagara Davit HarnawanAinda não há avaliações
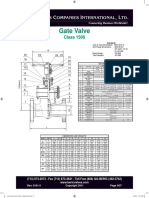
- Gate Valve Class 1500Documento1 páginaGate Valve Class 1500Hamdi Al-sarooryAinda não há avaliações
- Material Selection and Design For Delivery Drone PropellersDocumento6 páginasMaterial Selection and Design For Delivery Drone PropellersRicardo DíazAinda não há avaliações
- Membrane Pressure Relief Valves: VHS-CDocumento4 páginasMembrane Pressure Relief Valves: VHS-C88jdccAinda não há avaliações
- Mechanical Properties of Wood and SteelDocumento2 páginasMechanical Properties of Wood and SteelritolabAinda não há avaliações
- GMH 14 NoRestrictionDocumento9 páginasGMH 14 NoRestrictionKarma Pema DorjeAinda não há avaliações
- WL 835H Liugong Heavy DutyDocumento13 páginasWL 835H Liugong Heavy Dutyrusydi raushan fikriAinda não há avaliações
- Course: Advanced Thermodynamics For Chemical and Process EngineeringDocumento2 páginasCourse: Advanced Thermodynamics For Chemical and Process Engineeringnaytpuri montemayorAinda não há avaliações
- Me PDFDocumento553 páginasMe PDFSoma GhoshAinda não há avaliações
- Coastal Tug "Mhan Aung-4": Ministry of TransportDocumento2 páginasCoastal Tug "Mhan Aung-4": Ministry of TransportnyaungzinAinda não há avaliações
- 3in Elamr Drawing Illustration in One FileDocumento43 páginas3in Elamr Drawing Illustration in One FileusamakhattakAinda não há avaliações
- Engine Oil ViscosityDocumento2 páginasEngine Oil Viscosityjhnbrry21803Ainda não há avaliações
- Kawasaki 1100 STX DI Service ManualDocumento288 páginasKawasaki 1100 STX DI Service Manualnoname618483% (12)
- Rexroth: Spare Parts ListDocumento26 páginasRexroth: Spare Parts ListRafael RodriguezAinda não há avaliações
- Experiment No:03 Governor: Kinematics and Dynamics Lab Manual (ME406ES)Documento7 páginasExperiment No:03 Governor: Kinematics and Dynamics Lab Manual (ME406ES)Pagan jatarAinda não há avaliações
- Petrochemical Furnaces PDFDocumento45 páginasPetrochemical Furnaces PDFAditya PrajasAinda não há avaliações
- What Is Steam TracingDocumento4 páginasWhat Is Steam TracingahmadAinda não há avaliações