Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
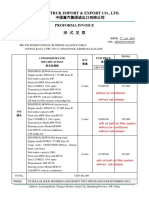
- Pro Forma Invoice For HOWO Tractor Truck and Dump Truck (CIF) CorrigéDocumento2 páginasPro Forma Invoice For HOWO Tractor Truck and Dump Truck (CIF) CorrigéFAOUZI100% (1)
- Synopsis LPG Gas LeakageDocumento2 páginasSynopsis LPG Gas LeakageSahil DhirAinda não há avaliações
- A Seminar On Circuit BreakerDocumento19 páginasA Seminar On Circuit BreakerSahil DhirAinda não há avaliações
- Speed Checkers For HighwaysDocumento49 páginasSpeed Checkers For HighwaysSahil DhirAinda não há avaliações
- Alcohol Detection Helmet and Smart HelmetDocumento4 páginasAlcohol Detection Helmet and Smart HelmetSahil DhirAinda não há avaliações
- Car Parking GuardDocumento2 páginasCar Parking GuardSahil DhirAinda não há avaliações
- Acknowledgement GroupDocumento1 páginaAcknowledgement GroupSahil DhirAinda não há avaliações
- Acknowedge MentDocumento1 páginaAcknowedge MentSahil DhirAinda não há avaliações
- PFMSDocumento5 páginasPFMSSahil DhirAinda não há avaliações
- Solar Powered Electric FenceDocumento2 páginasSolar Powered Electric FenceSahil DhirAinda não há avaliações
- A Project Report ON: "Automatic Facial Expression Recognition (AFER) System"Documento1 páginaA Project Report ON: "Automatic Facial Expression Recognition (AFER) System"Sahil DhirAinda não há avaliações
- Components Required For Robotic Grass Cutter MachineDocumento1 páginaComponents Required For Robotic Grass Cutter MachineSahil DhirAinda não há avaliações
- Agricultural Automatic Sprayer Robot AbstractDocumento1 páginaAgricultural Automatic Sprayer Robot AbstractSahil DhirAinda não há avaliações
- The DC MOTOR SPEED CONTROL Circuit Is Primarily A 555 IC Based PWMDocumento3 páginasThe DC MOTOR SPEED CONTROL Circuit Is Primarily A 555 IC Based PWMSahil DhirAinda não há avaliações
- Hand Made CarDocumento33 páginasHand Made CarSahil DhirAinda não há avaliações
- Inter Vehicular Communication - PPT Suprit SeminarDocumento21 páginasInter Vehicular Communication - PPT Suprit SeminarSahil Dhir67% (3)
- Tect Objects Using Viola-Jones Algorithm %to Detect Face: Clear CLCDocumento4 páginasTect Objects Using Viola-Jones Algorithm %to Detect Face: Clear CLCSahil DhirAinda não há avaliações
- Report Petronas TowerDocumento32 páginasReport Petronas TowerSahil DhirAinda não há avaliações
- SchemeId 1037 NIDHITBIDocumento23 páginasSchemeId 1037 NIDHITBISahil DhirAinda não há avaliações
- WAS-21A1EN ReferenceDesignDocumento20 páginasWAS-21A1EN ReferenceDesignthao nguyenAinda não há avaliações
- Presentation Topic ListDocumento6 páginasPresentation Topic ListTawsiful AlamAinda não há avaliações
- UL 213 Certificate For MegaPress and MegaPress FKMDocumento7 páginasUL 213 Certificate For MegaPress and MegaPress FKMKevin GonzalesAinda não há avaliações
- Instrumentation Control Cable Gen. To EN 50288-7: Flame Retardant, Sunlight Resistant 90 °C / 500 VDocumento4 páginasInstrumentation Control Cable Gen. To EN 50288-7: Flame Retardant, Sunlight Resistant 90 °C / 500 VShashank SaxenaAinda não há avaliações
- Current Harmonic Analysis of Multi Pulse Diode Rectifiers With Phase Shifting TransformerDocumento5 páginasCurrent Harmonic Analysis of Multi Pulse Diode Rectifiers With Phase Shifting TransformerJakka VenkatAinda não há avaliações
- ATV32 Safety Functions Manual EN S1A45606 07Documento98 páginasATV32 Safety Functions Manual EN S1A45606 07RMC ElectricieniAinda não há avaliações
- Semester I Paper I ELC-111: Semiconductor Devices and Basic Electronic SystemsDocumento14 páginasSemester I Paper I ELC-111: Semiconductor Devices and Basic Electronic SystemsPrashant PatilAinda não há avaliações
- Project: Layyah Combined Cycle Power Plant: Sub Station: Equipment: Panel Type BAY Ref: DateDocumento3 páginasProject: Layyah Combined Cycle Power Plant: Sub Station: Equipment: Panel Type BAY Ref: DatesamlashAinda não há avaliações
- Design and Analysis of PROTECTED FLANGE COUPLING Solidworks 2016 and ANSYS WorkbenchDocumento27 páginasDesign and Analysis of PROTECTED FLANGE COUPLING Solidworks 2016 and ANSYS Workbenchamu100% (1)
- Incubadora Atom Air Incu I Manual de ServicioDocumento188 páginasIncubadora Atom Air Incu I Manual de ServicioDuban GuerreroAinda não há avaliações
- Installation GuidelinesDocumento19 páginasInstallation GuidelinesBalamurugan ArumugamAinda não há avaliações
- Third Periodical Test in English and Science 6Documento16 páginasThird Periodical Test in English and Science 6aiko idio100% (2)
- SHS 1st Quarter PRELIMDocumento3 páginasSHS 1st Quarter PRELIMLuis John VillamagnoAinda não há avaliações
- Current Notes - #4 Coil & Motor WindingDocumento1 páginaCurrent Notes - #4 Coil & Motor WindingTheodor EikeAinda não há avaliações
- EV ChargerDocumento27 páginasEV ChargerIzeddin Hussein IbrahimAinda não há avaliações
- Landing Gear SystemsDocumento21 páginasLanding Gear SystemsTalha ÇiftciAinda não há avaliações
- 8W-30 Fuel - Ignition System 2.0 - 2.4LDocumento17 páginas8W-30 Fuel - Ignition System 2.0 - 2.4LdadaAinda não há avaliações
- Job Card ManualDocumento20 páginasJob Card ManualAngga WaeAinda não há avaliações
- LPG VesselDocumento1 páginaLPG VesselMarakanaMaheshAinda não há avaliações
- ASAS-Pallman-Filters-CrossReference Catalogue 1Documento50 páginasASAS-Pallman-Filters-CrossReference Catalogue 1suraj pandey100% (1)
- Safe-Lec 2 Hanger / Anchor ClampsDocumento1 páginaSafe-Lec 2 Hanger / Anchor ClampsfaridAinda não há avaliações
- SigmaWin+5.72 Release NotesDocumento6 páginasSigmaWin+5.72 Release NotesLeoSilvaAinda não há avaliações
- Electrical Measurement and TestingDocumento12 páginasElectrical Measurement and TestingMYres PengsonAinda não há avaliações
- FPSC TestDocumento6 páginasFPSC TestTouqeer MetloAinda não há avaliações
- Dodge Quantis Gear Box BrochureDocumento12 páginasDodge Quantis Gear Box BrochuresitaAinda não há avaliações
- DET40073 Topic 1Documento54 páginasDET40073 Topic 1HAAVINESHAinda não há avaliações
- 32pfl5605 98 Dfu EngDocumento36 páginas32pfl5605 98 Dfu EngMiki MikicAinda não há avaliações
- n.1 Bomba Royal Bean 420Documento3 páginasn.1 Bomba Royal Bean 420Luis Felipe Morales JaraAinda não há avaliações
- APM4953 Dual P-Channel Enhancement Mode Mosfet: FeaturesDocumento7 páginasAPM4953 Dual P-Channel Enhancement Mode Mosfet: FeaturesАндрей ПоляковAinda não há avaliações