Você também pode gostar
- BK 31212217Documento6 páginasBK 31212217IJMERAinda não há avaliações
- APS Lecture-4Documento20 páginasAPS Lecture-4dearlight17Ainda não há avaliações
- FACTS Flexible Alternating Current Transmission SystemsDocumento31 páginasFACTS Flexible Alternating Current Transmission SystemsSoumia É LècAinda não há avaliações
- Currents Through Inductances, Capacitances and ResistancesDocumento14 páginasCurrents Through Inductances, Capacitances and ResistancesZulu LoveAinda não há avaliações
- Static Var Compensator Controls Reactive PowerDocumento23 páginasStatic Var Compensator Controls Reactive PowersetyawanAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- EEE4009 Facts and HVDCDocumento32 páginasEEE4009 Facts and HVDCsumitAinda não há avaliações
- Static Var CompensatorDocumento29 páginasStatic Var CompensatorCarlos Fabian GallardoAinda não há avaliações
- AN1003 Teccor ThyristorsDocumento9 páginasAN1003 Teccor ThyristorsmtcquigAinda não há avaliações
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlNo EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlNota: 5 de 5 estrelas5/5 (1)
- Power Quality Impacts of An Electric Arc Furnace and Its CompensationDocumento8 páginasPower Quality Impacts of An Electric Arc Furnace and Its CompensationPudhur Kannan ManiAinda não há avaliações
- Expt 4Documento24 páginasExpt 4Ariston EtormaAinda não há avaliações
- Report Converter 3Documento7 páginasReport Converter 3عمار الشهاريAinda não há avaliações
- IEC Exam 2023Documento15 páginasIEC Exam 2023Phyo KoAinda não há avaliações
- QUT Digital Repository:: Ghosh, Arindam Ledwich, GerardDocumento7 páginasQUT Digital Repository:: Ghosh, Arindam Ledwich, Gerardhans_fitz4134Ainda não há avaliações
- IJEDRCP1402017Documento4 páginasIJEDRCP1402017anas maraabaAinda não há avaliações
- AC-Motor Time ConstantDocumento32 páginasAC-Motor Time ConstantMorten BroAinda não há avaliações
- L-20 (SSG) (Pe) ( (Ee) Nptel)Documento12 páginasL-20 (SSG) (Pe) ( (Ee) Nptel)Venkatesh KarriAinda não há avaliações
- SVC PrincipleDocumento5 páginasSVC PrincipleEngr Imtiaz Hussain GilaniAinda não há avaliações
- PAPER 2003 03 en HV Shunt Reactor Secrets For Protection EngineersDocumento30 páginasPAPER 2003 03 en HV Shunt Reactor Secrets For Protection Engineerslamugre20003506Ainda não há avaliações
- ABB HV Shunt ReactorDocumento30 páginasABB HV Shunt Reactortkdrt2166100% (1)
- 3.6 The Design of Harmonic Filter and Reactive Power Compensation in Power Supply SystemDocumento5 páginas3.6 The Design of Harmonic Filter and Reactive Power Compensation in Power Supply SystemLong LeoAinda não há avaliações
- VSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownDocumento38 páginasVSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownleslyAinda não há avaliações
- Analyze Single Phase Half Wave RectifierDocumento4 páginasAnalyze Single Phase Half Wave RectifierDave Pooja DilipkumarAinda não há avaliações
- Simulation and Implementation of FC-TCR: Sumit K Rathor (IEEE Member), Chintan Patel, Mithila S ZodapeDocumento10 páginasSimulation and Implementation of FC-TCR: Sumit K Rathor (IEEE Member), Chintan Patel, Mithila S ZodapeShawn Aryan AroraAinda não há avaliações
- Progect 2Documento12 páginasProgect 2ali hussainAinda não há avaliações
- AC To AC Converters Unit 5Documento37 páginasAC To AC Converters Unit 5manoj kumar0% (1)
- Switched Capacitor CircuitsDocumento6 páginasSwitched Capacitor CircuitsEduardo ReynaAinda não há avaliações
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNota: 2 de 5 estrelas2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetAinda não há avaliações
- Electrical Network Standards and Their Impact on Power Converter DesignDocumento16 páginasElectrical Network Standards and Their Impact on Power Converter Designsoulaway100% (1)
- TCRDocumento6 páginasTCRLucian TomaAinda não há avaliações
- Comparison Between LCC and VSCDocumento5 páginasComparison Between LCC and VSCijsretAinda não há avaliações
- What Is The Power ElectronicsDocumento16 páginasWhat Is The Power ElectronicsashammoudaAinda não há avaliações
- Static FC/TCR CompensatorDocumento36 páginasStatic FC/TCR CompensatorHans De Keulenaer100% (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- A Novel Aeronautical Static Inverter With High Frequency Pulse DC Link PDFDocumento8 páginasA Novel Aeronautical Static Inverter With High Frequency Pulse DC Link PDFqiwatingAinda não há avaliações
- Rectifiers AboutDocumento51 páginasRectifiers AboutIonescu ViorelAinda não há avaliações
- Facts: Flexible A.C Transmission System: AC Transmission of Electrical EnergyDocumento30 páginasFacts: Flexible A.C Transmission System: AC Transmission of Electrical Energyvenki249Ainda não há avaliações
- Control AC Voltage Using ThyristorsDocumento8 páginasControl AC Voltage Using ThyristorsAnucha YieAinda não há avaliações
- Modeling and Control of an Advanced Static Var Compensator Using Three-Level InverterDocumento6 páginasModeling and Control of an Advanced Static Var Compensator Using Three-Level InverterRaviraj KumbharAinda não há avaliações
- Statespace Model FWD ConverterDocumento4 páginasStatespace Model FWD ConverterrogerozAinda não há avaliações
- Power Electronics For Utility Applications (EE529) Chapter 2: Static Shunt CompensatorsDocumento16 páginasPower Electronics For Utility Applications (EE529) Chapter 2: Static Shunt CompensatorsdebealAinda não há avaliações
- Exp-8 9 19Documento4 páginasExp-8 9 19Dave Pooja DilipkumarAinda não há avaliações
- TCSC LoadflowDocumento7 páginasTCSC Loadflowreddy_nnsAinda não há avaliações
- ClampDocumento8 páginasClampGaetano GaetanoAinda não há avaliações
- To Study The Resonance Condition of A Series LCR Circuit.: Manual As A Part of B. Tech Physics Laboratory August 12, 2016Documento10 páginasTo Study The Resonance Condition of A Series LCR Circuit.: Manual As A Part of B. Tech Physics Laboratory August 12, 2016Ravinder Kumar100% (1)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetAinda não há avaliações
- Ac Voltage Controllers: V Variable AC RMS O/P Voltage AC Input Voltage F V FDocumento6 páginasAc Voltage Controllers: V Variable AC RMS O/P Voltage AC Input Voltage F V FRoss ShawAinda não há avaliações
- Optimizing Buck Converter Load Transient ResponseDocumento7 páginasOptimizing Buck Converter Load Transient ResponseNéstor BernalAinda não há avaliações
- AC Circuits PDFDocumento6 páginasAC Circuits PDFRANDOLPHEAinda não há avaliações
- Flexible AC Transmission SystemDocumento21 páginasFlexible AC Transmission Systemsarthak mishraAinda não há avaliações
- Dire Dawa University: Institute of TechnologyDocumento49 páginasDire Dawa University: Institute of TechnologyAsed ZakirAinda não há avaliações
- The Switched Capacitor Resistor: Electronic Circuit Discrete Time Signal Processing SwitchesDocumento6 páginasThe Switched Capacitor Resistor: Electronic Circuit Discrete Time Signal Processing SwitchesJaymin PatelAinda não há avaliações
- Facts ControllersDocumento74 páginasFacts ControllersShubhendra TMU FacultyAinda não há avaliações
- Modeling and Simulation of Frequency Converter Used in Speed Control of Asynchronous MotorDocumento6 páginasModeling and Simulation of Frequency Converter Used in Speed Control of Asynchronous MotorLelosPinelos123Ainda não há avaliações
- Bs-El-344 - Lecture-05 - P2Documento13 páginasBs-El-344 - Lecture-05 - P2Bushra IbrahimAinda não há avaliações
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsAinda não há avaliações
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNo EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesAinda não há avaliações
- 1.3.6.6.8. Weibull DistributionDocumento5 páginas1.3.6.6.8. Weibull DistributionAkinbode Sunday OluwagbengaAinda não há avaliações
- 164 Auday MohamadDocumento7 páginas164 Auday MohamadAkinbode Sunday OluwagbengaAinda não há avaliações
- ABB launches new capacitor shelf range from UK Power Quality facilityDocumento40 páginasABB launches new capacitor shelf range from UK Power Quality facilityAkinbode Sunday OluwagbengaAinda não há avaliações
- Guide to Earthing Systems in Electrical NetworksDocumento113 páginasGuide to Earthing Systems in Electrical NetworksRameez ZafarAinda não há avaliações
- Static FC/TCR CompensatorDocumento36 páginasStatic FC/TCR CompensatorHans De Keulenaer100% (2)
- 1RP9 2 08 11 08Documento2 páginas1RP9 2 08 11 08Akinbode Sunday OluwagbengaAinda não há avaliações
- Globalization NewDocumento37 páginasGlobalization NewAkinbode Sunday OluwagbengaAinda não há avaliações
- Advanced Control Systems ExamDocumento12 páginasAdvanced Control Systems ExamHimanshu VohraAinda não há avaliações
- 3-037-R001 Electronic Moisture Measuring Device C2241Documento2 páginas3-037-R001 Electronic Moisture Measuring Device C2241Akinbode Sunday OluwagbengaAinda não há avaliações
- Southern Company Transmission Operations OverviewDocumento25 páginasSouthern Company Transmission Operations OverviewAkinbode Sunday OluwagbengaAinda não há avaliações
- Optimal Capacitor Placement For IEEE 14 Bus System Using Genetic AlgorithmDocumento11 páginasOptimal Capacitor Placement For IEEE 14 Bus System Using Genetic AlgorithmAkinbode Sunday OluwagbengaAinda não há avaliações
- Power Electronics Power Electronics ChapDocumento72 páginasPower Electronics Power Electronics ChapAkinbode Sunday Oluwagbenga0% (1)
- HVDC Controls: 4.1 Historical BackgroundDocumento2 páginasHVDC Controls: 4.1 Historical BackgroundAkinbode Sunday OluwagbengaAinda não há avaliações
- Ybus Formation For Load Flow StudiesDocumento40 páginasYbus Formation For Load Flow Studiesgaurav100% (3)
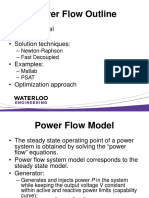
- Power FlowDocumento31 páginasPower FlowumamaheshwarraoAinda não há avaliações
- Chapter 20Documento15 páginasChapter 20JP BalsomoAinda não há avaliações
- Chapter 4Documento41 páginasChapter 4Anil ParmarAinda não há avaliações
- Symmetrical Components and Representation of Faulted NetworksDocumento22 páginasSymmetrical Components and Representation of Faulted NetworksShijumon KpAinda não há avaliações
- Guidelines On Research Proposal in ArchitectureDocumento15 páginasGuidelines On Research Proposal in ArchitectureKhalid Ali Saif Al-ShamsiAinda não há avaliações
- Fault Analysis NotesDocumento26 páginasFault Analysis NotesJohn Don88% (8)
- Daniel OlivaresDocumento4 páginasDaniel OlivaresAkinbode Sunday OluwagbengaAinda não há avaliações
- Chapter-VIII Limitations of The Study and Future Research DirectionsDocumento5 páginasChapter-VIII Limitations of The Study and Future Research DirectionsAkinbode Sunday OluwagbengaAinda não há avaliações
- Solutions For Homework 1Documento4 páginasSolutions For Homework 1Akinbode Sunday OluwagbengaAinda não há avaliações
- Helen Higgs Thesis PDFDocumento144 páginasHelen Higgs Thesis PDFAkinbode Sunday OluwagbengaAinda não há avaliações
- Itm00184 P159807 07 31 2016 1469958483796Documento9 páginasItm00184 P159807 07 31 2016 1469958483796Akinbode Sunday OluwagbengaAinda não há avaliações
- Short Circuit Calculations IIEE v5 - 1Documento82 páginasShort Circuit Calculations IIEE v5 - 1kranthikoyyadaAinda não há avaliações
- Power FlowDocumento42 páginasPower FlowAkinbode Sunday OluwagbengaAinda não há avaliações
- Modelling The Streamer Process in Liquid Dielectrics: University of Southampton, Southampton, UKDocumento1 páginaModelling The Streamer Process in Liquid Dielectrics: University of Southampton, Southampton, UKAkinbode Sunday OluwagbengaAinda não há avaliações
- Stabilty of Power Transmission Capability of HVDCDocumento8 páginasStabilty of Power Transmission Capability of HVDCAkinbode Sunday OluwagbengaAinda não há avaliações
- Mbs Public School: Topic: Study The Presence of Oxalate Ions in Guava Fruit at Different Stages of RipeningDocumento15 páginasMbs Public School: Topic: Study The Presence of Oxalate Ions in Guava Fruit at Different Stages of RipeningSwaraj Patel100% (1)
- Open Hole Logs Introduction GR SP CALDocumento21 páginasOpen Hole Logs Introduction GR SP CALmagedAinda não há avaliações
- Writing Iap Smarten Up in Maths Age 7 8Documento38 páginasWriting Iap Smarten Up in Maths Age 7 8lphoune100% (1)
- Ukur KadasterDocumento21 páginasUkur KadasterMuhammad NajmiAinda não há avaliações
- MCB and ELCB PDFDocumento35 páginasMCB and ELCB PDFChris AntoniouAinda não há avaliações
- Essential Statistics For The Behavioral Sciences 1st Edition Privitera Solutions ManualDocumento7 páginasEssential Statistics For The Behavioral Sciences 1st Edition Privitera Solutions Manualspinifexcandock8zf100% (26)
- Chapter 13: The Electronic Spectra of ComplexesDocumento42 páginasChapter 13: The Electronic Spectra of ComplexesAmalia AnggreiniAinda não há avaliações
- Jm-10 Operation Manual Rev02 UnlockedDocumento121 páginasJm-10 Operation Manual Rev02 UnlockedAlan Jimenez GonzalezAinda não há avaliações
- Presentation - Ftserver Gen 10 Slide LibraryDocumento25 páginasPresentation - Ftserver Gen 10 Slide LibraryJose AndresAinda não há avaliações
- Paracetamol Overdose: BW 40 KG Without Fluid RestrictionDocumento2 páginasParacetamol Overdose: BW 40 KG Without Fluid RestrictionAndy TanAinda não há avaliações
- ETABS Building Structure Analysis and Design ReportDocumento84 páginasETABS Building Structure Analysis and Design ReportMd Awesshadab0% (1)
- Compact GSM II: Installation and Application ManualDocumento22 páginasCompact GSM II: Installation and Application ManualleonardseniorAinda não há avaliações
- Unit I The Scientific Approach in EducationDocumento4 páginasUnit I The Scientific Approach in EducationadesaAinda não há avaliações
- Formulas For Thermodynamics 1Documento2 páginasFormulas For Thermodynamics 1Stefani Ann CabalzaAinda não há avaliações
- Code - Aster: Multiaxial Criteria of Starting in FatigueDocumento44 páginasCode - Aster: Multiaxial Criteria of Starting in FatigueYoyoAinda não há avaliações
- Oracle® Fusion Middleware: Administrator's Guide For Oracle Business Intelligence Applications 11g Release 1 (11.1.1.7)Documento76 páginasOracle® Fusion Middleware: Administrator's Guide For Oracle Business Intelligence Applications 11g Release 1 (11.1.1.7)Nicholas JohnAinda não há avaliações
- TCP Operational Overview and The TCP Finite State Machine (FSM)Documento4 páginasTCP Operational Overview and The TCP Finite State Machine (FSM)Mayank JaitlyAinda não há avaliações
- Smart Card/Proximity Based Vehicle Identification & Access Control SystemDocumento4 páginasSmart Card/Proximity Based Vehicle Identification & Access Control SystemkarunamoorthiAinda não há avaliações
- QR Code Attendance Monitoring SystemDocumento6 páginasQR Code Attendance Monitoring Systemjenny adlaoAinda não há avaliações
- Quality Control Analysis of Chlorpheniramine Maleate Marketed in NigeriaDocumento7 páginasQuality Control Analysis of Chlorpheniramine Maleate Marketed in Nigeriaحمزة الفنينيAinda não há avaliações
- Tut 5. Two-Column Hammerhead Pier PDFDocumento35 páginasTut 5. Two-Column Hammerhead Pier PDFOscar Varon BarbosaAinda não há avaliações
- 2021 Book AppliedAdvancedAnalyticsDocumento236 páginas2021 Book AppliedAdvancedAnalyticsKitykatmely LoveAinda não há avaliações
- Powered Acoustimass - 30 Speaker System AM-30P: Service ManualDocumento48 páginasPowered Acoustimass - 30 Speaker System AM-30P: Service ManualHama Aiea100% (1)
- Ice o Matic - Cim0436faDocumento2 páginasIce o Matic - Cim0436faJean RamosAinda não há avaliações
- MMW Module 2.2 (Part 2)Documento6 páginasMMW Module 2.2 (Part 2)ROJE DANNELL GALVANAinda não há avaliações
- Aeration PaperDocumento11 páginasAeration PapersehonoAinda não há avaliações
- The Pauli Exclusion PrincipleDocumento33 páginasThe Pauli Exclusion Principle3449336893Ainda não há avaliações
- Grade 6 Term1 Properties of 2-D Shapes Lesson 7Documento4 páginasGrade 6 Term1 Properties of 2-D Shapes Lesson 7Ayanda Siphesihle NdlovuAinda não há avaliações
- 478 - Phs 242 NotesDocumento61 páginas478 - Phs 242 NotesSovan ChakrabortyAinda não há avaliações
- Collet Chuck Catalog 2007 PDFDocumento28 páginasCollet Chuck Catalog 2007 PDFAlexandru Marius-catalinAinda não há avaliações