Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Emetor - An Educational Web-Based DesignDocumento6 páginasEmetor - An Educational Web-Based DesignPugalenthi.SAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- Dla-Aioxl11400s Datasheet Enus t7642332427Documento4 páginasDla-Aioxl11400s Datasheet Enus t7642332427Yosi DarmawansyahAinda não há avaliações
- ABC-GDH TIER-III Closeout Report For KAUST Observation On 16-OCT-2019Documento5 páginasABC-GDH TIER-III Closeout Report For KAUST Observation On 16-OCT-2019Em NiaxAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Oracle Solaris Cluster, Enterprise EditionDocumento3 páginasOracle Solaris Cluster, Enterprise Editionnearurheart1Ainda não há avaliações
- Sony CDX-G3100UE, G3100UV, G3150UP, G3150UV PDFDocumento38 páginasSony CDX-G3100UE, G3100UV, G3150UP, G3150UV PDFboroda2410Ainda não há avaliações
- Haldex Brake Products LTDDocumento30 páginasHaldex Brake Products LTDpricopdanielAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- 7080 HandbookDocumento139 páginas7080 Handbookdony prabuAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- SECTIONSDocumento35 páginasSECTIONSAHMEDAinda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Ena Doc 012-2006 PDFDocumento15 páginasEna Doc 012-2006 PDFM.Ubaid Ullah Khalid100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- IBM Tivoli Storage Manager For Databases Data Protection For Oracle For UNIX and Linux Installation and User's Guide Version 5.4.1Documento116 páginasIBM Tivoli Storage Manager For Databases Data Protection For Oracle For UNIX and Linux Installation and User's Guide Version 5.4.1Vijay Kumar ReddyAinda não há avaliações
- Design Project LabDocumento80 páginasDesign Project Labkaushikei22Ainda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Damien Elite C-7Documento3 páginasDamien Elite C-7m43238Ainda não há avaliações
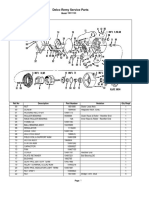
- Alternador Delco Remy 24 VCD 100 Amo.19011153Documento2 páginasAlternador Delco Remy 24 VCD 100 Amo.19011153JoséLuisRodríguezSánchezAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Approaches To The Qualification of CPS Drive SHEM-3 For Hanhikivi-1 NPPDocumento18 páginasApproaches To The Qualification of CPS Drive SHEM-3 For Hanhikivi-1 NPPLau SilvaAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Function Generator: 0.002Hz To 2MhzDocumento34 páginasFunction Generator: 0.002Hz To 2MhzsebastinAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Z-Pos E-ManualDocumento21 páginasZ-Pos E-Manualapi-276083983Ainda não há avaliações
- Abstract of Fiber Optic SensorsDocumento6 páginasAbstract of Fiber Optic SensorsKamal UniyalAinda não há avaliações
- Modulos Precableados-179Documento1 páginaModulos Precableados-179manuel chavezAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Module 3-Windows Operating SystemDocumento66 páginasModule 3-Windows Operating SystemSaurabh ShuklaAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- THX Design Process2Documento3 páginasTHX Design Process2Christian Ivan PolloAinda não há avaliações
- Yashica FlashDocumento17 páginasYashica FlashEnrique RichardAinda não há avaliações
- Single-Phase On-Grid String Inverter: FeaturesDocumento2 páginasSingle-Phase On-Grid String Inverter: FeaturesJadson RaphaelAinda não há avaliações
- 1 Filter InstructionsDocumento12 páginas1 Filter InstructionsthanhAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Discus Launch PackageDocumento69 páginasDiscus Launch Packageourstocks2002Ainda não há avaliações
- May 2003 Ray Marston - Understanding and Using OTA OP-AmpsDocumento5 páginasMay 2003 Ray Marston - Understanding and Using OTA OP-AmpsFederico CirelliAinda não há avaliações
- Ti Tas5630 EvmDocumento1 páginaTi Tas5630 EvmTrenton Astley IslaAinda não há avaliações
- Graph Theory Network AnalysisDocumento12 páginasGraph Theory Network AnalysisTeto ScheduleAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Fuente 32ld874ht PDFDocumento13 páginasFuente 32ld874ht PDFies837Ainda não há avaliações
- Advanced Mobile Communications Chapter1Documento18 páginasAdvanced Mobile Communications Chapter1Kondapalli LathiefAinda não há avaliações