Você também pode gostar
- Advanced Chassis and Body Control Systems-Part2Documento60 páginasAdvanced Chassis and Body Control Systems-Part2aliAinda não há avaliações
- Passive Restraint System_Airbag systemDocumento21 páginasPassive Restraint System_Airbag systemMagen Enthran100% (1)
- Air Suspension NewDocumento19 páginasAir Suspension Newmonikaneha123Ainda não há avaliações
- BYPASS Map SENSORDocumento3 páginasBYPASS Map SENSORKushal ExpertAinda não há avaliações
- Reset Steering Angle Sensors After AlignmentDocumento57 páginasReset Steering Angle Sensors After AlignmentAunaunZaa'Ainda não há avaliações
- Mercedes Benz Automatic Transmission Control UnitDocumento7 páginasMercedes Benz Automatic Transmission Control UnitReza VaraminiAinda não há avaliações
- មេរៀន ប្រព័ន្ធហ្វ្រាំង ABSDocumento26 páginasមេរៀន ប្រព័ន្ធហ្វ្រាំង ABSYon ChhannakAinda não há avaliações
- Daewoo Matiz - Hydraulic BrakesDocumento14 páginasDaewoo Matiz - Hydraulic BrakesadrianAinda não há avaliações
- Fusion Hybrid MKZ Hybrid 2012: Emergency Response GuideDocumento12 páginasFusion Hybrid MKZ Hybrid 2012: Emergency Response GuideTung NguyenAinda não há avaliações
- Seat - PoweredDocumento39 páginasSeat - PoweredMusat Catalin-MarianAinda não há avaliações
- Electric System For Opel AmperaDocumento24 páginasElectric System For Opel AmperaLuca TrottaAinda não há avaliações
- Mathematical Model To Design Rack and Pinion Ackerman Steering GeomteryDocumento5 páginasMathematical Model To Design Rack and Pinion Ackerman Steering GeomteryIntiGowthamSai100% (1)
- Citroen Berlingo BrochureDocumento29 páginasCitroen Berlingo BrochurereadalotbutnowisdomyetAinda não há avaliações
- HowStuffWorks - Benefits of Hill-Start ControlDocumento3 páginasHowStuffWorks - Benefits of Hill-Start ControlfrapedAinda não há avaliações
- Review of Dual Clutch Transmission SystemsDocumento7 páginasReview of Dual Clutch Transmission Systemselrobo0905Ainda não há avaliações
- Clever Three Wheeler Vehicle - 1482838722189 - 1483002318900Documento20 páginasClever Three Wheeler Vehicle - 1482838722189 - 1483002318900Saleem SalluAinda não há avaliações
- 05b4 - E70 Adaptive Headlight SystemDocumento28 páginas05b4 - E70 Adaptive Headlight SystemAthira Sobhana Ramachandran100% (1)
- Anti Lock BrakesDocumento26 páginasAnti Lock Brakesrishi_p08Ainda não há avaliações
- Captiva Manual MY13Documento380 páginasCaptiva Manual MY13David PomaAinda não há avaliações
- DC Voltage Testing: Nodal AnalysisDocumento7 páginasDC Voltage Testing: Nodal Analysisseshubabu_999Ainda não há avaliações
- Ec PDFDocumento1.290 páginasEc PDFMayobanex Moya MartinezAinda não há avaliações
- Steering Angle Sensor E38 M57Documento2 páginasSteering Angle Sensor E38 M57Michal PiratzAinda não há avaliações
- Active Body Control Final EditedDocumento18 páginasActive Body Control Final EditedVarun T GaneAinda não há avaliações
- 2010 Fusion Hybrid Milan Hybrid: Emergency Response GuideDocumento12 páginas2010 Fusion Hybrid Milan Hybrid: Emergency Response GuideTung NguyenAinda não há avaliações
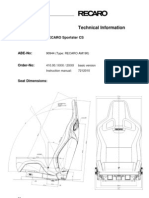
- Technical Info Recaro Sportster-CSDocumento3 páginasTechnical Info Recaro Sportster-CSahmtrAinda não há avaliações
- The Sharan 2011 Electrics/Electronics Design and Function: Service TrainingDocumento40 páginasThe Sharan 2011 Electrics/Electronics Design and Function: Service Traininggeorgescurios100% (1)
- Automatic Air Suspension SystemDocumento17 páginasAutomatic Air Suspension Systemmonikaneha123100% (1)
- Air Bag DeploymentDocumento15 páginasAir Bag DeploymentDhananjaiAinda não há avaliações
- DIN Wiring CodesDocumento5 páginasDIN Wiring Codesgstipe50% (2)
- HF35Documento64 páginasHF35Alexandre Da Silva PintoAinda não há avaliações
- Bugatti VeyronDocumento42 páginasBugatti VeyronFrank Kaufmann100% (7)
- AirbagsDocumento306 páginasAirbagsmkisa70Ainda não há avaliações
- Double WishboneDocumento6 páginasDouble WishboneRian SteveAinda não há avaliações
- 2002 Peugeot 307 SWDocumento137 páginas2002 Peugeot 307 SWClaude SefakoAinda não há avaliações
- Suspension System Presentation by Prashant MathurDocumento20 páginasSuspension System Presentation by Prashant MathurPrashant MathurAinda não há avaliações
- 4WD System Specs & Service GuideDocumento35 páginas4WD System Specs & Service GuideZM OhnAinda não há avaliações
- Electromagnetic Brakes ClutchesDocumento8 páginasElectromagnetic Brakes Clutchesfsilassie8012100% (1)
- Unit 6 - Vehicle Component TestingDocumento38 páginasUnit 6 - Vehicle Component TestingAshish RejikumarAinda não há avaliações
- Power Seats MemoryDocumento10 páginasPower Seats MemoryArimbi Gembiek100% (1)
- Disassembly Instructions Elantra GTDocumento46 páginasDisassembly Instructions Elantra GTPaulAinda não há avaliações
- Marshell Utility Vehicle CatalogDocumento3 páginasMarshell Utility Vehicle CatalogmarshellgolfcartAinda não há avaliações
- Ergonomics and PackagingDocumento63 páginasErgonomics and PackagingWaseem AnwarAinda não há avaliações
- ABS Hyundai Sonata Brake Repair GuideDocumento167 páginasABS Hyundai Sonata Brake Repair GuideSANTIAGO ALBERTO VIVAS GOMEZAinda não há avaliações
- Report On Braking SystemDocumento4 páginasReport On Braking Systemvaibhavporwal1Ainda não há avaliações
- 6158T Steering Angle 06 13Documento24 páginas6158T Steering Angle 06 13sagarAinda não há avaliações
- SSP 517 - The Golf 2013 Electrical EquipmentDocumento48 páginasSSP 517 - The Golf 2013 Electrical Equipmentotandreto100% (1)
- Baja Design ReportDocumento24 páginasBaja Design ReportRavi Shankar100% (1)
- WAPU Overhaul BZBDocumento8 páginasWAPU Overhaul BZBNedim ErkocevicAinda não há avaliações
- Oxygen Sensors Operation & TestingDocumento76 páginasOxygen Sensors Operation & TestingautoelectronicamlAinda não há avaliações
- Everything You Need to Know About Automobile Suspension SystemsDocumento27 páginasEverything You Need to Know About Automobile Suspension SystemsJainul PatelAinda não há avaliações
- Suspension DynamicsDocumento30 páginasSuspension DynamicsZoscalesAinda não há avaliações
- SSP 35 Petrol Engines 1.4l 16V 55kw 74kwDocumento50 páginasSSP 35 Petrol Engines 1.4l 16V 55kw 74kwKaloyan MarinovAinda não há avaliações
- Aprilia 3-Phase Recharging System DiagnosisDocumento15 páginasAprilia 3-Phase Recharging System DiagnosisManuallesAinda não há avaliações
- AC Pressure Chart R-134a Temperature Pressure ChartDocumento3 páginasAC Pressure Chart R-134a Temperature Pressure ChartJoseph Tchagou PoumoAinda não há avaliações
- Design of Double Wishbone Suspension System of BAJA VehicleDocumento8 páginasDesign of Double Wishbone Suspension System of BAJA VehicleSai Krishna SKAinda não há avaliações
- BMW E23 24 28 OdogearDocumento9 páginasBMW E23 24 28 OdogearporkfaceAinda não há avaliações
- Optimization of Double Wishbone Suspension System by Replacing Its Upper Arm by Single Member in Atv IJERTV6IS110006 PDFDocumento6 páginasOptimization of Double Wishbone Suspension System by Replacing Its Upper Arm by Single Member in Atv IJERTV6IS110006 PDFMahesh BorateAinda não há avaliações
- Hybrid Electric Vehicles: Principles and Applications with Practical PerspectivesNo EverandHybrid Electric Vehicles: Principles and Applications with Practical PerspectivesAinda não há avaliações
- Fully Autonomous Vehicles: Visions of the future or still reality?No EverandFully Autonomous Vehicles: Visions of the future or still reality?Ainda não há avaliações
- Autonomous CarDocumento41 páginasAutonomous CarZia AzamAinda não há avaliações
- 24 Volt ManualDocumento13 páginas24 Volt ManualCirilo JuniorAinda não há avaliações
- GDI 3.5 6G74 ManualDocumento263 páginasGDI 3.5 6G74 ManualOlga Plohotnichenko83% (35)
- Aut610 User's ManualDocumento45 páginasAut610 User's ManualJuan ContrerasAinda não há avaliações
- ZF 4 HP 18 FlaDocumento22 páginasZF 4 HP 18 FlaJuan ContrerasAinda não há avaliações
- Audi SSPDocumento26 páginasAudi SSPAndrei Brka100% (1)
- 07.5-09 TORKER Nozzle InstallationDocumento12 páginas07.5-09 TORKER Nozzle InstallationwyofreerideAinda não há avaliações
- 01Air-Elect Feb2015 PDFDocumento27 páginas01Air-Elect Feb2015 PDFjuan100% (1)
- Bobina Gauss PDFDocumento22 páginasBobina Gauss PDFfronjose100% (1)
- Familia 15 47 PDFDocumento44 páginasFamilia 15 47 PDFJuan ContrerasAinda não há avaliações
- Aut610 User's ManualDocumento31 páginasAut610 User's ManualjuanAinda não há avaliações
- 01B-ElectSchematics Feb2015 PDFDocumento19 páginas01B-ElectSchematics Feb2015 PDFjuanAinda não há avaliações
- Prevost Electrical SystemsDocumento23 páginasPrevost Electrical SystemsJuan ContrerasAinda não há avaliações
- ASE 2010 L2 Composite VehicleDocumento20 páginasASE 2010 L2 Composite VehicleSeven See67% (3)
- 4G1x Service ManualsDocumento99 páginas4G1x Service ManualsSaifuddin Dayah90% (10)
- Group 9 Self-Diagnostic System: Outline 1Documento3 páginasGroup 9 Self-Diagnostic System: Outline 1giapy0000Ainda não há avaliações
- System Wiring Diagrams A/C Circuit: CDR@WP - PLDocumento27 páginasSystem Wiring Diagrams A/C Circuit: CDR@WP - PLadcoryAinda não há avaliações
- Caterpillar EMCPDocumento40 páginasCaterpillar EMCPrealwild93% (59)
- USB - Link Quick Start Card 4 - 0 VersionDocumento2 páginasUSB - Link Quick Start Card 4 - 0 Versionricho2510Ainda não há avaliações
- t-030f Spanish p35-48Documento4 páginast-030f Spanish p35-48Juan ContrerasAinda não há avaliações
- Guia Electronic ADocumento7 páginasGuia Electronic AJuan ContrerasAinda não há avaliações
- Rebuilding The 6.6L Duramax Diesel PDFDocumento13 páginasRebuilding The 6.6L Duramax Diesel PDFJuan Contreras100% (3)
- Heui Catalog PDFDocumento6 páginasHeui Catalog PDFLuisYFer1Ainda não há avaliações
- Fuel Actuator PDFDocumento2 páginasFuel Actuator PDFJuan ContrerasAinda não há avaliações
- Ut81a b C接口软件操作说明Documento20 páginasUt81a b C接口软件操作说明Juan ContrerasAinda não há avaliações
- SerialDocumento1 páginaSerialJuan ContrerasAinda não há avaliações
- 4 AfeDocumento36 páginas4 AfeJuan ContrerasAinda não há avaliações
- 4a-Fe EngineDocumento13 páginas4a-Fe Engineanto_jo100% (5)
- Pinouts ICRDocumento38 páginasPinouts ICRAdal Vera100% (1)
- NGD 0605 S enDocumento154 páginasNGD 0605 S enJuan José Rodriguez100% (15)
- High-Band Base Station AntennaDocumento3 páginasHigh-Band Base Station AntennaGiang Nguyễn TrườngAinda não há avaliações
- CH 07 Solutions Practice ProblemsDocumento4 páginasCH 07 Solutions Practice ProblemsChris RosasAinda não há avaliações
- Problem 2.87Documento5 páginasProblem 2.87Eric Castillo MartínezAinda não há avaliações
- Experiment 2 SALAZARDocumento9 páginasExperiment 2 SALAZARgerand salazarAinda não há avaliações
- Magneto Ignition SystemDocumento3 páginasMagneto Ignition SystemsameerAinda não há avaliações
- 1MW Rooftop Solar PV Power Plant Permit PDFDocumento9 páginas1MW Rooftop Solar PV Power Plant Permit PDFPadmanathan Kasinathan KAinda não há avaliações
- Role of ECE in technological revolutionDocumento7 páginasRole of ECE in technological revolutionTorong VAinda não há avaliações
- Upd78f0500a PDFDocumento871 páginasUpd78f0500a PDFOsama YaseenAinda não há avaliações
- Secure Digital Acess System Using IbuttonDocumento4 páginasSecure Digital Acess System Using Ibuttonrama9942Ainda não há avaliações
- Manual ServiceDocumento53 páginasManual Servicediego alejandro quiroga ramosAinda não há avaliações
- 1 s2.0 S001999586590241X MainDocumento48 páginas1 s2.0 S001999586590241X MainNestor GlezAinda não há avaliações
- Fundamentals of Data Centre 1692137179Documento101 páginasFundamentals of Data Centre 1692137179kan luc N'guessan100% (1)
- Reduction of Magnetizing Inrush CurrentDocumento7 páginasReduction of Magnetizing Inrush CurrentBruno MoraesAinda não há avaliações
- PhotodetectorsDocumento46 páginasPhotodetectorsShivam AgarwalAinda não há avaliações
- Leak Detection EquipmentDocumento2 páginasLeak Detection EquipmentH2oNetAinda não há avaliações
- Product Sheet Switch Rotatory - Gw70437pDocumento1 páginaProduct Sheet Switch Rotatory - Gw70437pBeverly AtanozaAinda não há avaliações
- Flex Ray Communication SystemDocumento245 páginasFlex Ray Communication SystemsusannulAinda não há avaliações
- AceleradorDocumento14 páginasAceleradorMike perezAinda não há avaliações
- Rotordynamic Design Considerations For A 23 MW Compressor With Magnetic BearingsDocumento15 páginasRotordynamic Design Considerations For A 23 MW Compressor With Magnetic Bearingsmghgol100% (1)
- D.C. Machin BaidaDocumento53 páginasD.C. Machin BaidaLeonard ValdezAinda não há avaliações
- FRDocumento3 páginasFRThinkplus TradingAinda não há avaliações
- Cub Loc Touch ManualDocumento484 páginasCub Loc Touch ManualvacsaaAinda não há avaliações
- 21.1: On-Board Bus Device Driver Pseudocode ExamplesDocumento7 páginas21.1: On-Board Bus Device Driver Pseudocode ExamplesSoundarya SvsAinda não há avaliações
- Pickup Wiring 1 ConductorDocumento5 páginasPickup Wiring 1 ConductorJD HAinda não há avaliações
- Fulltext01 PDFDocumento17 páginasFulltext01 PDFShourya SONI (11C)Ainda não há avaliações
- Consort Catalogue 1708Documento127 páginasConsort Catalogue 1708qi.aperezAinda não há avaliações
- Laptop SchematicsDocumento33 páginasLaptop SchematicsRaju KhajjidoniAinda não há avaliações
- Intelligent BEAM ManualDocumento14 páginasIntelligent BEAM ManualmthuyaAinda não há avaliações
- Buc 6w-KuDocumento5 páginasBuc 6w-KukattiaAinda não há avaliações
- 5-kV Insulation Resistance Testers: BM11D and BM21Documento2 páginas5-kV Insulation Resistance Testers: BM11D and BM21Selk CLAinda não há avaliações