Você também pode gostar
- Thermodynamics: Subject: Engineering Special Topics 1 Topic: Thermodyanmics Prepared By: Engr. Noel GatbontonDocumento4 páginasThermodynamics: Subject: Engineering Special Topics 1 Topic: Thermodyanmics Prepared By: Engr. Noel GatbontonPaul Adriane TornerosAinda não há avaliações
- Chapter 5Documento25 páginasChapter 5dickinaround87100% (1)
- 233 2 V Example 13.23.: C B BC BCDocumento9 páginas233 2 V Example 13.23.: C B BC BCmuhammad haseebAinda não há avaliações
- 2020 Sept14 ME004ADocumento11 páginas2020 Sept14 ME004ADaniel ManivoughAinda não há avaliações
- NA 2 Notes 4 - Laws of Similarity of PropellersDocumento4 páginasNA 2 Notes 4 - Laws of Similarity of PropellersSudheendra ck100% (1)
- CSU Ph141 Su2020 AnswersDocumento15 páginasCSU Ph141 Su2020 Answersmark alisonAinda não há avaliações
- CivilFEM Theory ManualDocumento1.589 páginasCivilFEM Theory ManualRoberto Pérez100% (1)
- Homework 1 MADocumento38 páginasHomework 1 MACarla TolbertAinda não há avaliações
- Section 7: Thyristors and SwitchesDocumento18 páginasSection 7: Thyristors and Switcheschrist9088Ainda não há avaliações
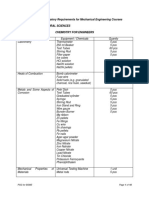
- ANNEX IV ME Laboratories SpecsDocumento16 páginasANNEX IV ME Laboratories SpecsSherwin MosomosAinda não há avaliações
- MATH 403 EDA Chapter 8Documento19 páginasMATH 403 EDA Chapter 8Marco YvanAinda não há avaliações
- Unit-I - SignalFlow GraphDocumento18 páginasUnit-I - SignalFlow Graphvenkkatesh57Ainda não há avaliações
- Variable Load On Power StationDocumento4 páginasVariable Load On Power StationMuhammad Jamshed Ali0% (2)
- Online Lab - Me Lab1 Expt 2 Area MeasurementDocumento5 páginasOnline Lab - Me Lab1 Expt 2 Area MeasurementDessa GuditoAinda não há avaliações
- Assignment - IDocumento4 páginasAssignment - IchritAinda não há avaliações
- CH 38synchronous Motor1 PDFDocumento46 páginasCH 38synchronous Motor1 PDFWidia AstutiAinda não há avaliações
- BorinagaaaaDocumento7 páginasBorinagaaaaNaitsirhc AganirobAinda não há avaliações
- Pneumatic+systems Module 3Documento22 páginasPneumatic+systems Module 3Aphrodites AmethystAinda não há avaliações
- Theoretical CyclesDocumento49 páginasTheoretical CyclesMariaEzzaSyUyAinda não há avaliações
- Jessica Agar: Search Subjects LOG INDocumento7 páginasJessica Agar: Search Subjects LOG INJamiel CatapangAinda não há avaliações
- DC Machines 1Documento49 páginasDC Machines 1Michelle Flores100% (3)
- Exergy A Measure of Work PotentialDocumento18 páginasExergy A Measure of Work PotentialjustdanishAinda não há avaliações
- Thermodynamics 2 Review Problem No 7 SOLUTIONDocumento3 páginasThermodynamics 2 Review Problem No 7 SOLUTIONangie 2498100% (1)
- Machine Elements: Cams: Group 7 Charlie Dionisio R - Jhun Lemos Jerphoenix Mullaneda Arsilio SilverioDocumento21 páginasMachine Elements: Cams: Group 7 Charlie Dionisio R - Jhun Lemos Jerphoenix Mullaneda Arsilio SilverioDeniell Joyce MarquezAinda não há avaliações
- Paulino, Paul Tyrone R. Assignment 2Documento14 páginasPaulino, Paul Tyrone R. Assignment 2Tyrone PaulinoAinda não há avaliações
- Design Procedure For Flat BeltDocumento2 páginasDesign Procedure For Flat BeltKutty AravindAinda não há avaliações
- Design of Experiment On How Hydroelectric Generator Can Generate Electric Power (Reaction Wheel Propeller)Documento25 páginasDesign of Experiment On How Hydroelectric Generator Can Generate Electric Power (Reaction Wheel Propeller)Justine Joseph NuevaAinda não há avaliações
- Engineering Economy Ms291 Instructor DRDocumento2 páginasEngineering Economy Ms291 Instructor DRDela Cruz, Rose Well V.Ainda não há avaliações
- Instrumentation (Finale)Documento20 páginasInstrumentation (Finale)Jonathan BacusAinda não há avaliações
- DOME-2 Notes QPapers PDFDocumento305 páginasDOME-2 Notes QPapers PDFSumit KumarAinda não há avaliações
- Mechanics of Material-1-5 PDFDocumento252 páginasMechanics of Material-1-5 PDFkhan janAinda não há avaliações
- Module 2. Properties and Characteristics of MaterialsDocumento28 páginasModule 2. Properties and Characteristics of MaterialsPearl Alexandra FabitoAinda não há avaliações
- The Carnot CycleDocumento9 páginasThe Carnot CyclePatrick Antonio Orge ChingAinda não há avaliações
- Activity 3 Synchronous Motor PSDocumento10 páginasActivity 3 Synchronous Motor PSReinz 0429Ainda não há avaliações
- Medium TransmissionDocumento15 páginasMedium TransmissionPerez Trisha Mae D.Ainda não há avaliações
- Sheet 1 - Introduction To Fluid MechanicsDocumento9 páginasSheet 1 - Introduction To Fluid MechanicsMugiwara SparrowAinda não há avaliações
- Module 4Documento18 páginasModule 4Kean BognotAinda não há avaliações
- ME301 Paper ADocumento2 páginasME301 Paper AMitesh KumarAinda não há avaliações
- Unit-4 Induction MotorsDocumento26 páginasUnit-4 Induction MotorsAnurag Singhal0% (1)
- 2-The Variable LoadDocumento14 páginas2-The Variable LoadPotatoFryAinda não há avaliações
- Michael Ernie F. Rodriguez: C N L NDocumento4 páginasMichael Ernie F. Rodriguez: C N L Njin subaAinda não há avaliações
- InstrumentationDocumento31 páginasInstrumentationYceuzumakijo CorresAinda não há avaliações
- Simplex Wave WindingDocumento12 páginasSimplex Wave WindingPeter Paul TufayAinda não há avaliações
- Basic Engineering Correlation ReviewerDocumento30 páginasBasic Engineering Correlation Reviewerjaamartinez0% (1)
- Non Homogenous Differential EquationDocumento11 páginasNon Homogenous Differential EquationMariel Cariño AlfiscarAinda não há avaliações
- Plates in EnerconDocumento38 páginasPlates in EnerconJevan Calaque100% (1)
- Statics 13esi Solutions-Manual Chapter 10Documento63 páginasStatics 13esi Solutions-Manual Chapter 10Kavinesh AnanthanAinda não há avaliações
- Chapter 1Documento15 páginasChapter 1سعيد بن إدريس100% (1)
- Arcilla, Zoren - Me Lab1 - Exp4 - M4act5Documento12 páginasArcilla, Zoren - Me Lab1 - Exp4 - M4act5dracarysAinda não há avaliações
- HjjooDocumento28 páginasHjjooJohn Patrick DagleAinda não há avaliações
- Module 2 - Equilibrium of Rigid BodiesDocumento21 páginasModule 2 - Equilibrium of Rigid BodiesJoyce AsisAinda não há avaliações
- ME Con-1 Mock-1Documento15 páginasME Con-1 Mock-1vidya chakitwarAinda não há avaliações
- VP 265 VL VP (P.F PT Pa Pa Pa 243902.44 VA Pa IL 306.79 AmpsDocumento5 páginasVP 265 VL VP (P.F PT Pa Pa Pa 243902.44 VA Pa IL 306.79 AmpsNiño John JaymeAinda não há avaliações
- MEng 198 Proposal FormatDocumento12 páginasMEng 198 Proposal FormatBilly JhunAinda não há avaliações
- Assignment 2 PSMDocumento4 páginasAssignment 2 PSMrazu1234Ainda não há avaliações
- Review Questions : G(S) C(S)Documento7 páginasReview Questions : G(S) C(S)Angel CallejebrioAinda não há avaliações
- Midterm 1 Review ProblemsDocumento40 páginasMidterm 1 Review ProblemsJulian MichaelAinda não há avaliações
- Lab. Equipments FamiliarizationDocumento3 páginasLab. Equipments FamiliarizationashfaqiAinda não há avaliações
- Pages From Nise Control Systems Engineering 6th EtextDocumento5 páginasPages From Nise Control Systems Engineering 6th EtextsreekanthaAinda não há avaliações
- Assignment 2 EquilibriumDocumento5 páginasAssignment 2 EquilibriumNirmit PatilAinda não há avaliações
- Resolution and CompositionDocumento83 páginasResolution and CompositionFujiAinda não há avaliações
- Resolution and CompositionDocumento84 páginasResolution and CompositionSilvers RayleighAinda não há avaliações
- Wind Triangle ProblemDocumento20 páginasWind Triangle ProblemdoiAinda não há avaliações
- Machine Design Formula Springs SummaryDocumento1 páginaMachine Design Formula Springs SummaryalbertAinda não há avaliações
- Machine Design Formula Spring and Belts SummaryDocumento1 páginaMachine Design Formula Spring and Belts SummaryalbertAinda não há avaliações
- Bolts and Screw Machine Design FormulasDocumento1 páginaBolts and Screw Machine Design FormulasalbertAinda não há avaliações
- Aircon NotesDocumento6 páginasAircon NotesalbertAinda não há avaliações
- Combined Gas-Vapor Power PlantDocumento20 páginasCombined Gas-Vapor Power PlantalbertAinda não há avaliações
- XI Geothermal Power PlantDocumento11 páginasXI Geothermal Power PlantalbertAinda não há avaliações
- Forecasting: Chapte RDocumento27 páginasForecasting: Chapte RalbertAinda não há avaliações
- Types of Turbines: Turbine ClassificationsDocumento6 páginasTypes of Turbines: Turbine ClassificationsalbertAinda não há avaliações
- Rotary PumpsDocumento31 páginasRotary PumpsalbertAinda não há avaliações
- Safety EngineeringDocumento18 páginasSafety EngineeringalbertAinda não há avaliações
- 9970 15771 1 SMDocumento6 páginas9970 15771 1 SMrxx1218Ainda não há avaliações
- Experiment No. (2) : Determination of Liquid Viscosity by Stock'S MethodDocumento5 páginasExperiment No. (2) : Determination of Liquid Viscosity by Stock'S MethodKawar Abid100% (1)
- Ohm's Law and Its Microscopic ViewDocumento13 páginasOhm's Law and Its Microscopic ViewMuhammad Quqan TahirAinda não há avaliações
- Wittke and Chao - 1967Documento8 páginasWittke and Chao - 1967Sachin ZanjeAinda não há avaliações
- Mechanics of Materials Torsion TestDocumento18 páginasMechanics of Materials Torsion Testjrkling100% (1)
- SeakeepingDocumento66 páginasSeakeepingSakib RafeeAinda não há avaliações
- ElectrodynamicsDocumento347 páginasElectrodynamicsFabri ChevalierAinda não há avaliações
- Dasar Teori Medan MagnetDocumento4 páginasDasar Teori Medan MagnetheniliaAinda não há avaliações
- Structural Stability CourseDocumento196 páginasStructural Stability CourseBrillVerdeAinda não há avaliações
- BS EN 1992-3:2006, Table 7.105 - Classification of TightnessDocumento13 páginasBS EN 1992-3:2006, Table 7.105 - Classification of TightnessEuniceAinda não há avaliações
- Ferro CementDocumento236 páginasFerro Cementpbharadwaj545Ainda não há avaliações
- Aeroacoustics Simulation of An Automotive A-Pillar Rain GutterDocumento12 páginasAeroacoustics Simulation of An Automotive A-Pillar Rain GutterJose David Duque MedinaAinda não há avaliações
- Q4 - WEEK 6 - LAS - 3 Time Dilation Length Contraction and Relativistic Velocity AdditionDocumento1 páginaQ4 - WEEK 6 - LAS - 3 Time Dilation Length Contraction and Relativistic Velocity AdditionRhenan LoseoAinda não há avaliações
- CH 1 - Engineering PhysicsDocumento12 páginasCH 1 - Engineering PhysicsHaroonAinda não há avaliações
- Moments and Levers: Moment of Force Force X Perpendicular Distance From FulcrumDocumento8 páginasMoments and Levers: Moment of Force Force X Perpendicular Distance From FulcrumiskenderbeyAinda não há avaliações
- PSAD-PreBoardExam02 ManilaRoundDocumento10 páginasPSAD-PreBoardExam02 ManilaRoundSharmaine FajutaganaAinda não há avaliações
- Quantitative Evaluation of Carbonation in Concrete UsingDocumento11 páginasQuantitative Evaluation of Carbonation in Concrete UsingJohn YoussefAinda não há avaliações
- CBSE Class 12 Physics Assignment - ElectrostatDocumento2 páginasCBSE Class 12 Physics Assignment - ElectrostatRahul KumarAinda não há avaliações
- Microsoft Word Mecvina PDFDocumento37 páginasMicrosoft Word Mecvina PDFErvin GohAinda não há avaliações
- 2020 Spring MESF5450 E04 PDFDocumento5 páginas2020 Spring MESF5450 E04 PDFLit Pao WongAinda não há avaliações
- download-Physics-A-level-Notes-Edexcel-IAL-Unit-4-Detailed-4.3. Further MechanicsDocumento11 páginasdownload-Physics-A-level-Notes-Edexcel-IAL-Unit-4-Detailed-4.3. Further MechanicsTowsif HassanAinda não há avaliações
- 01 Hydraulics & Geotechnical Engineering 1 PDFDocumento6 páginas01 Hydraulics & Geotechnical Engineering 1 PDFKate AdvinculaAinda não há avaliações
- Lecture Powerpoints: Physics For Scientists & Engineers, With Modern Physics, 4 EditionDocumento39 páginasLecture Powerpoints: Physics For Scientists & Engineers, With Modern Physics, 4 EditionMuhammad HarisAinda não há avaliações
- BSC PhysicsDocumento92 páginasBSC PhysicsHarry-pearceAinda não há avaliações
- Heat (Add Science) OkDocumento35 páginasHeat (Add Science) OkJaswardi Anwar Bin Md Yaacob� IPGKKBAinda não há avaliações
- Preparation and Use of Direct Tension Stress-Corrosion Test SpecimensDocumento6 páginasPreparation and Use of Direct Tension Stress-Corrosion Test SpecimensHadi HowaidaAinda não há avaliações
- The Mechanics of WrinklesDocumento12 páginasThe Mechanics of WrinklesRamon MajAinda não há avaliações