Você também pode gostar
- IES - Electronics Engineering - Analog Electronic CircuitsDocumento71 páginasIES - Electronics Engineering - Analog Electronic CircuitsVishwanath MalakarAinda não há avaliações
- Voltage Controlled OscillatorDocumento7 páginasVoltage Controlled Oscillatorjonesy5000Ainda não há avaliações
- A Cable Configuration Technique For The Balance of Current Distribution in Parallel Cables PDFDocumento8 páginasA Cable Configuration Technique For The Balance of Current Distribution in Parallel Cables PDFJeremy McfaddenAinda não há avaliações
- Kikkert RF Electronics 2015Documento309 páginasKikkert RF Electronics 2015juan100% (1)
- Panduan Teknik Edisi 4 PDFDocumento346 páginasPanduan Teknik Edisi 4 PDFChoo Chee Wee100% (2)
- SimulationDocumento442 páginasSimulationxyz1380Ainda não há avaliações
- Mini Inverter Mini Project Report.Documento34 páginasMini Inverter Mini Project Report.sravan75% (32)
- TV & Video Engineer's Reference BookNo EverandTV & Video Engineer's Reference BookK G JacksonNota: 2.5 de 5 estrelas2.5/5 (2)
- I2CACIS Chee Wee (Corrected)Documento5 páginasI2CACIS Chee Wee (Corrected)Choo Chee WeeAinda não há avaliações
- 3Documento6 páginas3Phong Đào Văn HoàngAinda não há avaliações
- T 7.2.1.1 Multiplicación de FrecuenciaDocumento40 páginasT 7.2.1.1 Multiplicación de FrecuenciaBlademir Parra GayosoAinda não há avaliações
- 08 - Chapter 1Documento17 páginas08 - Chapter 1SriramAinda não há avaliações
- A Fiber Optical Sensor For Non-Contact Vibration MeasurementsDocumento2 páginasA Fiber Optical Sensor For Non-Contact Vibration MeasurementsEd TrawtmamAinda não há avaliações
- Ecen Lab 6 ReportDocumento5 páginasEcen Lab 6 Reportapi-241454978Ainda não há avaliações
- Baharav - Capacitive Touch Sensing Signal and Image Processing AlgorithmsDocumento12 páginasBaharav - Capacitive Touch Sensing Signal and Image Processing AlgorithmsHaipeng JinAinda não há avaliações
- Edc Lab Manuals1Documento78 páginasEdc Lab Manuals1sowmiyaAinda não há avaliações
- DS2020 Lab2Documento9 páginasDS2020 Lab2Bách Hoàng XuânAinda não há avaliações
- Peak to peak voltage is given by number of divisions x volts/divisionDocumento12 páginasPeak to peak voltage is given by number of divisions x volts/divisionG.Srinivasa sagarAinda não há avaliações
- Introduction To Instrumentation (Eeng4183) : by Tesfamichael ADocumento24 páginasIntroduction To Instrumentation (Eeng4183) : by Tesfamichael ADagnachew AzeneAinda não há avaliações
- Introduction to Oscilloscope Lab ReportDocumento9 páginasIntroduction to Oscilloscope Lab ReportMohammad IbraheemAinda não há avaliações
- Room Noise Detector CircuitDocumento17 páginasRoom Noise Detector Circuitithrohit67% (6)
- Mini Project Report on Tactile and Piezo Electric SensorsDocumento13 páginasMini Project Report on Tactile and Piezo Electric SensorsStar ArjunAinda não há avaliações
- 1 s2.0 S0924424724000931 MainDocumento11 páginas1 s2.0 S0924424724000931 Mainopenjavier5208Ainda não há avaliações
- Electronic Nose Seminar Report Analyzes Sensors and ApplicationsDocumento10 páginasElectronic Nose Seminar Report Analyzes Sensors and ApplicationsCHANDU PRAKASHAinda não há avaliações
- Eddycurrentsensor PCB SENSOR 2010Documento8 páginasEddycurrentsensor PCB SENSOR 2010Siphesihle NkosiAinda não há avaliações
- ETE Lab 1 AssignmentDocumento2 páginasETE Lab 1 AssignmentHAMMAD AHMADAinda não há avaliações
- Matty Barth Tech NoteDocumento3 páginasMatty Barth Tech Notebhuvan Gowda HKAinda não há avaliações
- Mex4271 Tma1 2012Documento3 páginasMex4271 Tma1 2012Niroshan ManoharanAinda não há avaliações
- The Human-Simulation Intelligent Control of Contact Force Based On The Detection of Ultrasonic SensorsDocumento5 páginasThe Human-Simulation Intelligent Control of Contact Force Based On The Detection of Ultrasonic SensorsIbtihel BenharkouAinda não há avaliações
- Optics and Lasers in Engineering: Zhongjie Ren, Jianxin Li, Rihong Zhu, Ke Cui, Qing He, Hailin WangDocumento6 páginasOptics and Lasers in Engineering: Zhongjie Ren, Jianxin Li, Rihong Zhu, Ke Cui, Qing He, Hailin WangayuAinda não há avaliações
- Design and evaluation of a capacitively coupled sensor readout circuitDocumento75 páginasDesign and evaluation of a capacitively coupled sensor readout circuitRamachandran VasudevanAinda não há avaliações
- Sensor TechnologyDocumento25 páginasSensor TechnologyRahul SahuAinda não há avaliações
- Presentation 1Documento12 páginasPresentation 1Jenil MangukiyaAinda não há avaliações
- ECG Signal Pattern Analysis Using Pan-Tompkin's AlgorithmDocumento4 páginasECG Signal Pattern Analysis Using Pan-Tompkin's AlgorithmngovantamcuteAinda não há avaliações
- Dimas SeptiantoDocumento5 páginasDimas SeptiantoFauzan RohmadAinda não há avaliações
- Smart Fingertip Tactile Sensors For Agrorobotics ApplicationsDocumento11 páginasSmart Fingertip Tactile Sensors For Agrorobotics ApplicationsChidananda BasavannaAinda não há avaliações
- LatexDocumento4 páginasLatexSERGIO ANDRES ROMERO TORRESAinda não há avaliações
- Understanding Capacitive Position Sensors MicroSense Update 13-OCT-11Documento12 páginasUnderstanding Capacitive Position Sensors MicroSense Update 13-OCT-11asimAinda não há avaliações
- Question Bank - Unit VDocumento5 páginasQuestion Bank - Unit Vjames RAinda não há avaliações
- EMI Lab Manual2Documento27 páginasEMI Lab Manual2charuAinda não há avaliações
- Biosignal Based Human Control of Robotic ArmDocumento5 páginasBiosignal Based Human Control of Robotic ArmAravind ThechoppersAinda não há avaliações
- Sensors Accurate Estimation of Airborne Ultrasonic Time-Of-flight For Overlapping Echoes-13-15465-V2Documento24 páginasSensors Accurate Estimation of Airborne Ultrasonic Time-Of-flight For Overlapping Echoes-13-15465-V2A N ArunkumarAinda não há avaliações
- Real Time Feature Extraction of ECG Signal On Android PlatformDocumento6 páginasReal Time Feature Extraction of ECG Signal On Android PlatformphatvhupAinda não há avaliações
- Smart Sewage Alert System For Workers in Real-Time Applications Using IotDocumento4 páginasSmart Sewage Alert System For Workers in Real-Time Applications Using IotSUPER HITZZAinda não há avaliações
- Wideband Transimpedance Amplifiers For Optoelectronics: Applications To Dynamic InterferometryDocumento8 páginasWideband Transimpedance Amplifiers For Optoelectronics: Applications To Dynamic Interferometrymod-ingAinda não há avaliações
- Measure Waveforms and Parameters Using DSODocumento3 páginasMeasure Waveforms and Parameters Using DSOMohsin Iqbal Department of Electrical Engineering100% (1)
- 2) Basics of SRDocumento5 páginas2) Basics of SRKhushboo TiwariAinda não há avaliações
- Sensors: A Real-Time Smart Sensor For High-Resolution Frequency Estimation in Power SystemsDocumento18 páginasSensors: A Real-Time Smart Sensor For High-Resolution Frequency Estimation in Power SystemsgreybAinda não há avaliações
- Semiconductor Detector Systems Chapter-1 PDFDocumento42 páginasSemiconductor Detector Systems Chapter-1 PDFHaiderAinda não há avaliações
- Unesco - Eolss Sample Chapters: Sensors and TransducersDocumento8 páginasUnesco - Eolss Sample Chapters: Sensors and TransducersshubhAinda não há avaliações
- Apparatus:: AIM: Acquire The Knowledge of Output Devices Like CRO and DSO For Observing OutputDocumento5 páginasApparatus:: AIM: Acquire The Knowledge of Output Devices Like CRO and DSO For Observing OutputAdwait BorikarAinda não há avaliações
- PHY01Documento6 páginasPHY01ben harrisAinda não há avaliações
- 325 Lab 2 ReportDocumento8 páginas325 Lab 2 Reportapi-241454978Ainda não há avaliações
- Mkm1133 Instrumentation and Control SystemDocumento19 páginasMkm1133 Instrumentation and Control SystemNurul Nadia Mohd ZawawiAinda não há avaliações
- ElectrogoniometerDocumento3 páginasElectrogoniometerGaurav MolankarAinda não há avaliações
- Experiment No. 1: AIM: To Observe Sine Wave, Square Wave, Triangular Wave and RampDocumento2 páginasExperiment No. 1: AIM: To Observe Sine Wave, Square Wave, Triangular Wave and RampAnand SinghAinda não há avaliações
- d22 Tkbhaumik VeccDocumento2 páginasd22 Tkbhaumik VeccpratikAinda não há avaliações
- Take Home Exam 414 Spring 2020Documento7 páginasTake Home Exam 414 Spring 2020Omar YehiaAinda não há avaliações
- Expt3 Am DemodulationDocumento9 páginasExpt3 Am DemodulationRichel Noronio RoblesAinda não há avaliações
- Mahalakshmi: Unit - Iv - Storage and Display DevicesDocumento18 páginasMahalakshmi: Unit - Iv - Storage and Display Devicestareq omarAinda não há avaliações
- An 1405-1 PDFDocumento28 páginasAn 1405-1 PDFjinterpaulAinda não há avaliações
- Semester: V Class / Branch: TE ITDocumento6 páginasSemester: V Class / Branch: TE ITKaustubh SawantAinda não há avaliações
- Exp 2 Study of Different Electronics InstrumentsDocumento9 páginasExp 2 Study of Different Electronics Instrumentsabhinav tuplondheAinda não há avaliações
- Unit 3 - Basic Instrumentation And Measurement Techniques PPT Notes Material For Sem II Uploaded By Navdeep RaghavDocumento120 páginasUnit 3 - Basic Instrumentation And Measurement Techniques PPT Notes Material For Sem II Uploaded By Navdeep Raghavavikool1708Ainda não há avaliações
- Design of High-Precision Infrared Multi-Touch ScreDocumento6 páginasDesign of High-Precision Infrared Multi-Touch ScreValentin ApostolovAinda não há avaliações
- HC SR04 EtcDocumento6 páginasHC SR04 EtcnickeryeieiAinda não há avaliações
- kEYNOTE (Chee Wee)Documento4 páginaskEYNOTE (Chee Wee)Choo Chee WeeAinda não há avaliações
- D Internet Myiemorgmy Iemms Assets Doc Alldoc Document 181 - Section B Essay 2001Documento2 páginasD Internet Myiemorgmy Iemms Assets Doc Alldoc Document 181 - Section B Essay 2001Zulfarizan ZakariaAinda não há avaliações
- kEYNOTE (Chee Wee)Documento4 páginaskEYNOTE (Chee Wee)Choo Chee WeeAinda não há avaliações
- kEYNOTE (Chee Wee)Documento4 páginaskEYNOTE (Chee Wee)Choo Chee WeeAinda não há avaliações
- Musical Applications of Electric Field Sensing: Joep, Gersh@media - Mit.eduDocumento28 páginasMusical Applications of Electric Field Sensing: Joep, Gersh@media - Mit.eduAbhijit JainAinda não há avaliações
- Towards Passive Haptic Learning of Piano Songs PDFDocumento6 páginasTowards Passive Haptic Learning of Piano Songs PDFChoo Chee WeeAinda não há avaliações
- I2CACIS Chee Wee (Corrected) PDFDocumento5 páginasI2CACIS Chee Wee (Corrected) PDFChoo Chee WeeAinda não há avaliações
- Moog Evolution PDFDocumento9 páginasMoog Evolution PDFChoo Chee WeeAinda não há avaliações
- Parametric Excitation Model For Waveguide Piano Synthesis PDFDocumento4 páginasParametric Excitation Model For Waveguide Piano Synthesis PDFChoo Chee WeeAinda não há avaliações
- EyePiano A Piano Interface For Disabled To Compose Piano Music Via Eye Movements PDFDocumento6 páginasEyePiano A Piano Interface For Disabled To Compose Piano Music Via Eye Movements PDFChoo Chee WeeAinda não há avaliações
- Score-Informed Transcription For Automatic Piano Tutoring PDFDocumento5 páginasScore-Informed Transcription For Automatic Piano Tutoring PDFChoo Chee WeeAinda não há avaliações
- Piano Sound Characteristics A Study On Some Factors Affecting Loudness in Digital and Acoustic Pianos PDFDocumento4 páginasPiano Sound Characteristics A Study On Some Factors Affecting Loudness in Digital and Acoustic Pianos PDFChoo Chee WeeAinda não há avaliações
- A Probabilistic Line Spectrum Model For Musical Instrument Sounds and Its Application To Piano Tuning Estimation PDFDocumento4 páginasA Probabilistic Line Spectrum Model For Musical Instrument Sounds and Its Application To Piano Tuning Estimation PDFChoo Chee WeeAinda não há avaliações
- ChordATune - An Emotion Based Melody Harmonizer For Piano Music PDFDocumento2 páginasChordATune - An Emotion Based Melody Harmonizer For Piano Music PDFChoo Chee Wee0% (1)
- Automatic Transcription of Piano Music by Sparse Representation of Magnitude Spectra PDFDocumento6 páginasAutomatic Transcription of Piano Music by Sparse Representation of Magnitude Spectra PDFChoo Chee WeeAinda não há avaliações
- Distance Education of Digital Piano Based On IP Multicast and Streaming Media Technology PDFDocumento3 páginasDistance Education of Digital Piano Based On IP Multicast and Streaming Media Technology PDFChoo Chee WeeAinda não há avaliações
- Trans Jour en USDocumento9 páginasTrans Jour en USChoo Chee WeeAinda não há avaliações
- Data Sheet TOP210PFIDocumento16 páginasData Sheet TOP210PFIlobitoferozlAinda não há avaliações
- Hartley Oscillator Circuit & OperationDocumento11 páginasHartley Oscillator Circuit & OperationDIVAKAR KUMARAinda não há avaliações
- Em 78Documento55 páginasEm 78Mio Q MioAinda não há avaliações
- PWM Controller Data SheetDocumento13 páginasPWM Controller Data SheetSebastian CorreaAinda não há avaliações
- Pic 18F45K22Documento494 páginasPic 18F45K22AlexandruTomescu100% (1)
- Basics of LC Oscillators: Excerpted From "The Designer's Guide To High-Purity Oscillators" by Hegazi, Rael, and AbidiDocumento9 páginasBasics of LC Oscillators: Excerpted From "The Designer's Guide To High-Purity Oscillators" by Hegazi, Rael, and Abidiamr khaledAinda não há avaliações
- SAW Resonators Surface Acoustic Wave: TokenDocumento9 páginasSAW Resonators Surface Acoustic Wave: TokenLOTADODEBITSAinda não há avaliações
- ASTM C 215 Standard Test Method For Fundamental Transverse, Longitudinal, and Torsional ResonantDocumento7 páginasASTM C 215 Standard Test Method For Fundamental Transverse, Longitudinal, and Torsional ResonantRyan LasacaAinda não há avaliações
- 3-Lesson Notes Lecture 32Documento7 páginas3-Lesson Notes Lecture 32Tomislav JukićAinda não há avaliações
- MDU B.tech Electrical Engineering 5th Sem SyllabusDocumento8 páginasMDU B.tech Electrical Engineering 5th Sem SyllabusDhruv AhujaAinda não há avaliações
- Service Manual Midland Alan 48 Exel HomerDocumento32 páginasService Manual Midland Alan 48 Exel Homerlaga manAinda não há avaliações
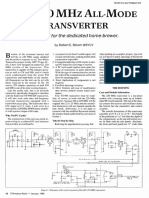
- 220 MHZ All-Mode Transverter PDFDocumento6 páginas220 MHZ All-Mode Transverter PDFvu2ttp0% (1)
- Tps 40057 PWPDocumento33 páginasTps 40057 PWPcatsoithahuong84Ainda não há avaliações
- UC3842B/3843B: Unisonic Technologies Co., LTDDocumento11 páginasUC3842B/3843B: Unisonic Technologies Co., LTDSOLID ENGENHARIA & PROJETOSAinda não há avaliações
- Service Manual JVC kd-s743r / kd-s741rDocumento42 páginasService Manual JVC kd-s743r / kd-s741ra637888Ainda não há avaliações
- LIC Manual PDFDocumento55 páginasLIC Manual PDFmekalajesiAinda não há avaliações
- Design: IdeasDocumento5 páginasDesign: Ideasdcastrelos2000Ainda não há avaliações
- Phase Noise Measurement Seminar - HPDocumento124 páginasPhase Noise Measurement Seminar - HPfahkingmoron100% (1)
- Chapter 4Documento22 páginasChapter 4mengistu AddisAinda não há avaliações
- Magnetic Resonant AmplifierDocumento36 páginasMagnetic Resonant AmplifierKWojtekAinda não há avaliações
- Variable Frequency Sine Wave Oscillator: Mapúa UniversityDocumento8 páginasVariable Frequency Sine Wave Oscillator: Mapúa UniversityIrish MalibanAinda não há avaliações
- M113 Chassis Service ManualDocumento90 páginasM113 Chassis Service ManualCarlos A. Torres0% (1)
- 80C196MCDocumento22 páginas80C196MCMiguel MacpAinda não há avaliações
- EDC Question Bank 3rd SemDocumento3 páginasEDC Question Bank 3rd SemTamil C RathinamAinda não há avaliações